S-ar putea să vă placă și
- Articulo Control PID de NivelDocument7 paginiArticulo Control PID de NivelFredy VeraÎncă nu există evaluări
- Paper PidDocument7 paginiPaper PidBryan Roy Cordova GomezÎncă nu există evaluări
- AaaaDocument14 paginiAaaaYesquenÎncă nu există evaluări
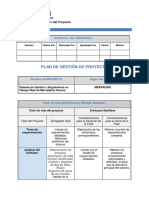
- Plan Del ProyectoDocument10 paginiPlan Del ProyectoasadasdsaÎncă nu există evaluări
- Faces Del Siclo de Vida de Desarrollo de Software TablaDocument3 paginiFaces Del Siclo de Vida de Desarrollo de Software Tablaalison gamezÎncă nu există evaluări
- 4 2 1 Calculos de Esfuerzo Costos y TiemposDocument27 pagini4 2 1 Calculos de Esfuerzo Costos y TiemposGonzalo OpazoÎncă nu există evaluări
- Logica DifusaDocument16 paginiLogica DifusaFernando Ruiz JuarezÎncă nu există evaluări
- Fundamentos de Instrumentación VirtualDocument15 paginiFundamentos de Instrumentación VirtualGabriela Itzhel Sánchez MontoyaÎncă nu există evaluări
- 2 - Ingeniera Del Software 4PDocument36 pagini2 - Ingeniera Del Software 4PMariano Rubén JurczyszynÎncă nu există evaluări
- Tarea Mapa ConceptualDocument2 paginiTarea Mapa ConceptualJosselyn VásquezÎncă nu există evaluări
- ACTIVIDAD#4Document3 paginiACTIVIDAD#4EDGAR AYALA CARRE�OÎncă nu există evaluări
- DPSS U2 A1 JuhrDocument8 paginiDPSS U2 A1 JuhrSanteago RosasÎncă nu există evaluări
- Sistemas de InformacionDocument18 paginiSistemas de InformacionPedro FalcónÎncă nu există evaluări
- Gestión Del Alcance Del ProyectoDocument5 paginiGestión Del Alcance Del ProyectoCristina AmayaÎncă nu există evaluări
- Clase # 3 - Actividades Del ModeloDocument16 paginiClase # 3 - Actividades Del ModeloabcdeÎncă nu există evaluări
- Subtema I Conceptos BásicosDocument60 paginiSubtema I Conceptos BásicosNorma ChavarriaÎncă nu există evaluări
- Silabo 2020-I Analisis y Diseno de Sistemas IiDocument6 paginiSilabo 2020-I Analisis y Diseno de Sistemas IiDanyer Valencia LlamocaÎncă nu există evaluări
- Resumen Cap2 Roger Pressman - 2Document19 paginiResumen Cap2 Roger Pressman - 2ZreoÎncă nu există evaluări
- 9A Ingeniaría - 30 - PlanIngenieriaDeProyectosDocument26 pagini9A Ingeniaría - 30 - PlanIngenieriaDeProyectosYami CortezÎncă nu există evaluări
- Programación VisualDocument15 paginiProgramación VisualLupita MendozaÎncă nu există evaluări
- Act Apren1 JAZMDocument5 paginiAct Apren1 JAZMCRISTHOPER AARON RICO FONSECAÎncă nu există evaluări
- 5 - IS Ciclos de VidaDocument18 pagini5 - IS Ciclos de VidasofiniveiroÎncă nu există evaluări
- Diseño y Ejecucion de Plan de Pruebas Del Sistema 2022Document14 paginiDiseño y Ejecucion de Plan de Pruebas Del Sistema 2022RAMIRO ESNEIDER GUAVITA GOMEZÎncă nu există evaluări
- Metodologías de ProgramaciónDocument1 paginăMetodologías de ProgramaciónGracia Godínez Paola XurabetÎncă nu există evaluări
- 4 Instrumentacion VirtualDocument21 pagini4 Instrumentacion VirtualbuenavistaÎncă nu există evaluări
- Ddoo U2 Ea Ismg DDocument7 paginiDdoo U2 Ea Ismg Disaac1morales-1Încă nu există evaluări
- Guia ScadaDocument19 paginiGuia ScadaJorge Hernan LopezÎncă nu există evaluări
- Fases de Ciclo de Vida de Desarrollo de SoftwareDocument2 paginiFases de Ciclo de Vida de Desarrollo de SoftwareOdeth Monserrat Medina DuronÎncă nu există evaluări
- Presentación Software EngineeringDocument20 paginiPresentación Software EngineeringWilder Jose Estrada BarriosÎncă nu există evaluări
- Faces Del Ciclo de Vida Del Desarrollo SoftwareDocument2 paginiFaces Del Ciclo de Vida Del Desarrollo SoftwareCLAUDIA SALASÎncă nu există evaluări
- Cuadro Comparativo Metodología OoDocument6 paginiCuadro Comparativo Metodología OoLuis Angel RomeroÎncă nu există evaluări
- Guía Actividad 3 - Proyecto de AutomatizaciònDocument8 paginiGuía Actividad 3 - Proyecto de AutomatizaciònJoaoCanalesGuzmánÎncă nu există evaluări
- Metodología de Diseño de Software RADDocument12 paginiMetodología de Diseño de Software RADJerson HernandezÎncă nu există evaluări
- Procesos de Software y Sus ModelosDocument9 paginiProcesos de Software y Sus ModelosCristian Ivan Antonio100% (1)
- Tabla Comparativa de Las Etapas Del Ciclo de Vida de Desarrollo de SistemasDocument3 paginiTabla Comparativa de Las Etapas Del Ciclo de Vida de Desarrollo de SistemasnavileÎncă nu există evaluări
- Desarrollo de SoftwareDocument23 paginiDesarrollo de SoftwareMeliyaraaÎncă nu există evaluări
- Instala y Configura Aplicaciones y ServiciosDocument66 paginiInstala y Configura Aplicaciones y ServiciosErnesto AmezcuaÎncă nu există evaluări
- TGS Tarea10Document13 paginiTGS Tarea10SimplementeGeorgeÎncă nu există evaluări
- Ingeniería de ProyectosDocument27 paginiIngeniería de ProyectosFlavioÎncă nu există evaluări
- Sílabo Proyectos AutomatizaciónDocument6 paginiSílabo Proyectos AutomatizaciónJuan Manuel Casanca HuertaÎncă nu există evaluări
- Semana 3-Proceso de SoftwareDocument33 paginiSemana 3-Proceso de SoftwareMaricielo SandovalÎncă nu există evaluări
- Modelos de Proceso: DRA y PrototiposDocument14 paginiModelos de Proceso: DRA y PrototiposTania Gutierrez JaureguiÎncă nu există evaluări
- El Proceso-09Document46 paginiEl Proceso-09Leonel Soria CortesÎncă nu există evaluări
- Programa de La AsignaturaDocument18 paginiPrograma de La AsignaturaEdward De La ValielÎncă nu există evaluări
- C0108079 Laboratorio de UsabilidadDocument5 paginiC0108079 Laboratorio de Usabilidadchilo reyesÎncă nu există evaluări
- Pruebas y Calidad de Software - Tabla Ciclo de SoftwareDocument4 paginiPruebas y Calidad de Software - Tabla Ciclo de SoftwareJavier DominguezÎncă nu există evaluări
- Metodología RUP: Docente: Ing. Josie Alheli Holgado TupaDocument21 paginiMetodología RUP: Docente: Ing. Josie Alheli Holgado TupaWILBER RAMIREZ TOLEDOÎncă nu există evaluări
- 11.-Informatica IIDocument12 pagini11.-Informatica IIDeissy Tabita Chavez RamirezÎncă nu există evaluări
- 2.0 Procesos Software Curso POODocument11 pagini2.0 Procesos Software Curso POOOscar Hernan FrancoÎncă nu există evaluări
- UNLAM Requerimientos de Ingenieria Parte 2Document27 paginiUNLAM Requerimientos de Ingenieria Parte 2Agustin WetÎncă nu există evaluări
- Colorful Process Pie ChartDocument3 paginiColorful Process Pie Chartaaronfigueroapm49Încă nu există evaluări
- Unidad 1Document61 paginiUnidad 1Antonio VillaltaÎncă nu există evaluări
- GPI - LAB03. Martinez, Gil, RodriguezDocument6 paginiGPI - LAB03. Martinez, Gil, RodriguezevericÎncă nu există evaluări
- Silabus DS Dise+ o de SoftwareDocument5 paginiSilabus DS Dise+ o de SoftwareNando Chirinos AroniÎncă nu există evaluări
- Asignatura - Instrumentacion-VirtualDocument23 paginiAsignatura - Instrumentacion-VirtualJuan Carlos CasalÎncă nu există evaluări
- Tarea 4 - Jose Alejandro Cardenas CadavidDocument7 paginiTarea 4 - Jose Alejandro Cardenas CadavidLizbeth SinisterraÎncă nu există evaluări
- Tema 7Document22 paginiTema 7joseph maciasÎncă nu există evaluări
- Kanban, Ciclos (Espagnol) - 15-106Document92 paginiKanban, Ciclos (Espagnol) - 15-106Salma NafisÎncă nu există evaluări
- Instrumentacion VirtualDocument27 paginiInstrumentacion VirtualAnita Del Carmen Morales CruzÎncă nu există evaluări
- UF2406 - El cliclo de vida del desarrollo de aplicacionesDe la EverandUF2406 - El cliclo de vida del desarrollo de aplicacionesÎncă nu există evaluări
- Creacion de PCB Con ProteusDocument31 paginiCreacion de PCB Con ProteusJose Padilla100% (1)
- TFG P 312Document119 paginiTFG P 312eliasÎncă nu există evaluări
- Capítulo 3: La Célula FotovoltaicaDocument28 paginiCapítulo 3: La Célula FotovoltaicaJose PadillaÎncă nu există evaluări
- Formato F023Document4 paginiFormato F023Jose PadillaÎncă nu există evaluări
- Supervision Y Alistamiento de Módulos - Confección 4Document21 paginiSupervision Y Alistamiento de Módulos - Confección 4Jose PadillaÎncă nu există evaluări
- Fuentes de Alimentación Conmutadas en La Práctica PDFDocument20 paginiFuentes de Alimentación Conmutadas en La Práctica PDFJose Padilla50% (6)
- Instrucciones de X-Carve - Tornillo de AvanceDocument7 paginiInstrucciones de X-Carve - Tornillo de AvanceJose PadillaÎncă nu există evaluări
- Formato Control Inspección Baños PúblicosDocument4 paginiFormato Control Inspección Baños PúblicosJose PadillaÎncă nu există evaluări
- Taller 1 Actividad 3Document5 paginiTaller 1 Actividad 3Jose PadillaÎncă nu există evaluări
- GFPI-F-019 Guia 01 InstrumentaciónDocument11 paginiGFPI-F-019 Guia 01 InstrumentaciónJose PadillaÎncă nu există evaluări
- Fase3 Robert CollazosDocument10 paginiFase3 Robert Collazosrobert santiago collazos bonillaÎncă nu există evaluări
- Practicas Labview-Arduino PDFDocument15 paginiPracticas Labview-Arduino PDFMihai BogdanÎncă nu există evaluări
- El Ambiente de Programación LabViewDocument5 paginiEl Ambiente de Programación LabViewGiovanni BrittonÎncă nu există evaluări
- Control Tanques AcopladosDocument187 paginiControl Tanques AcopladostibanaboyacaÎncă nu există evaluări
- Laboratorio 5Document22 paginiLaboratorio 5Onil Alex VeranoÎncă nu există evaluări
- Metodos para Trabajar Arduino-LabviewDocument4 paginiMetodos para Trabajar Arduino-LabviewJuan AcevedoÎncă nu există evaluări
- Tecnologias de Instrumentacion para BioingenieriaDocument41 paginiTecnologias de Instrumentacion para BioingenieriaAlejandro Soto AltamiranoÎncă nu există evaluări
- TDG Control PDFDocument271 paginiTDG Control PDFAnaMLondoñoÎncă nu există evaluări
- Practica LabviewDocument7 paginiPractica Labviewasro20080% (1)
- Silabo Instrumentación y SensoresDocument8 paginiSilabo Instrumentación y SensoresDairo ChuquimarcaÎncă nu există evaluări
- AutosintonizacionDocument76 paginiAutosintonizacionRodrigoBurgosÎncă nu există evaluări
- NI CaseStudy Cs 12665Document5 paginiNI CaseStudy Cs 12665Jossy H AtocheÎncă nu există evaluări
- Articulo Control PID de NivelDocument7 paginiArticulo Control PID de NivelJose PadillaÎncă nu există evaluări
- ELECTROMIOGRAFODocument6 paginiELECTROMIOGRAFOTatiana GaitanÎncă nu există evaluări
- Funciones Scilab PDFDocument22 paginiFunciones Scilab PDFalbert RÎncă nu există evaluări
- Figura: Datashet tl082Document4 paginiFigura: Datashet tl082netflix rapidoÎncă nu există evaluări
- Saber Electronica No. de Colección 339Document112 paginiSaber Electronica No. de Colección 339COL. CCEE100% (4)
- INDUCONTROL SAC - Guía Deteccion de Tonos DTMF en LabVIEWDocument7 paginiINDUCONTROL SAC - Guía Deteccion de Tonos DTMF en LabVIEWHugo Junior Quispe ChaconÎncă nu există evaluări
- Proyecto Integrador-Automatización de Una Banda TransportadoraDocument10 paginiProyecto Integrador-Automatización de Una Banda Transportadoraxavier yanzaÎncă nu există evaluări
- Software Labview DetalladoDocument3 paginiSoftware Labview DetalladoCarlos Enrique Monsefu AlvarezÎncă nu există evaluări
- Aporte LabviewDocument6 paginiAporte LabviewjdelosrioscÎncă nu există evaluări
- Cap 7 - Lectura y Escritura de Archivos (NOv-2019)Document55 paginiCap 7 - Lectura y Escritura de Archivos (NOv-2019)Jesús Manuel Tarín FontesÎncă nu există evaluări
- Paso 1 Identificación de Presaberes y Necesidades de AprendizajeDocument4 paginiPaso 1 Identificación de Presaberes y Necesidades de AprendizajeRosaAnggeliicaNietoÎncă nu există evaluări
- Programacion AvanzadaDocument4 paginiProgramacion AvanzadaBeto XavyÎncă nu există evaluări
- Instrumentación VirtualDocument16 paginiInstrumentación VirtualroshiesenseiÎncă nu există evaluări
- Tesis EOG Labview ArduinoDocument88 paginiTesis EOG Labview ArduinoDoctor ManhattanÎncă nu există evaluări
- Manual de TorsionDocument27 paginiManual de TorsionDuvancho AlbinoÎncă nu există evaluări
- Labview YOLOV3Document12 paginiLabview YOLOV3Flores Rosario AzdruvalÎncă nu există evaluări
- Diseño de Planta de TratamientoDocument55 paginiDiseño de Planta de TratamientoFernando PonceÎncă nu există evaluări