S-ar putea să vă placă și
- Wind Pro ManualDocument45 paginiWind Pro ManualAziz Khalili0% (1)
- Basics of Wind Energy ConversionDocument7 paginiBasics of Wind Energy ConversionRam Krishna Singh100% (7)
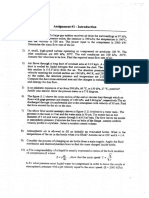
- AssignmentsDocument14 paginiAssignmentsMahmoudKamalElshazlyÎncă nu există evaluări
- AssignmentsDocument14 paginiAssignmentsMahmoudKamalElshazlyÎncă nu există evaluări
- Shanghai TowerDocument25 paginiShanghai TowerApoorva Mudgal100% (1)
- The Update of IEC 61400-24 Lightning Protection of Wind TurbinesDocument17 paginiThe Update of IEC 61400-24 Lightning Protection of Wind TurbinesHar HarÎncă nu există evaluări
- Week-10 Wind Energy (Part 2) - 2020-2021 - 2TDocument54 paginiWeek-10 Wind Energy (Part 2) - 2020-2021 - 2TSka dooshÎncă nu există evaluări
- Swes Unit 3Document64 paginiSwes Unit 3pradeepÎncă nu există evaluări
- Wind EnergyDocument11 paginiWind EnergyYOGENDRAÎncă nu există evaluări
- Wind Energy CollectorsDocument9 paginiWind Energy CollectorsVinoth ParamananthamÎncă nu există evaluări
- CH 6Document26 paginiCH 6AbrhaÎncă nu există evaluări
- Overview of Wind Energy TechDocument7 paginiOverview of Wind Energy TechDeborah CrominskiÎncă nu există evaluări
- Wind PowerDocument66 paginiWind PowerArham QadeerÎncă nu există evaluări
- Lecture 3Document14 paginiLecture 3Benedicto MugongoÎncă nu există evaluări
- Wind Power FundamentalsDocument41 paginiWind Power FundamentalsHmaedÎncă nu există evaluări
- 3 Year Mechanical Power MPE 331: Dr. Mohamed Hammam 2019Document19 pagini3 Year Mechanical Power MPE 331: Dr. Mohamed Hammam 2019Mohamed HammamÎncă nu există evaluări
- Introduction of WindDocument15 paginiIntroduction of WindChandrakant MishraÎncă nu există evaluări
- Lecture No 6: Wind Power GenerationDocument29 paginiLecture No 6: Wind Power GenerationLiaqat HussainÎncă nu există evaluări
- Wind Power Generation On HighwayDocument34 paginiWind Power Generation On HighwayAvaneesh mishraÎncă nu există evaluări
- Wind Energy Lect-1Document31 paginiWind Energy Lect-1muhammad_ajmal_25Încă nu există evaluări
- WindpowerDocument24 paginiWindpowerDouglasÎncă nu există evaluări
- Lecture 19 - Wind PowerDocument38 paginiLecture 19 - Wind PowerLi RanÎncă nu există evaluări
- Wind Turbine MainDocument8 paginiWind Turbine MainMihaila CozminÎncă nu există evaluări
- (Ajay Singh) Review On Control Techniques For VSWT NewDocument6 pagini(Ajay Singh) Review On Control Techniques For VSWT NewAjay SinghÎncă nu există evaluări
- Eet-216 Lab #7 v1.2fl - Wind TurbineDocument19 paginiEet-216 Lab #7 v1.2fl - Wind Turbinekugarajravi2002Încă nu există evaluări
- Wind Energy Wind Turbines Wind Power in Turkey: Emre Erdem.Document47 paginiWind Energy Wind Turbines Wind Power in Turkey: Emre Erdem.api-295462696Încă nu există evaluări
- 325 Ch6 WindPower PDFDocument95 pagini325 Ch6 WindPower PDFpletikosa8Încă nu există evaluări
- Prakash BatchDocument27 paginiPrakash BatchPRAVEEN coolÎncă nu există evaluări
- Wind EnergyDocument6 paginiWind EnergyAbdullahi AbdurrahmanÎncă nu există evaluări
- Introduction To Wind Energy SystemsDocument17 paginiIntroduction To Wind Energy SystemsCarlos MuñozÎncă nu există evaluări
- Fabrication of Multi Blade Wind Mill For Higher EfficiencyDocument49 paginiFabrication of Multi Blade Wind Mill For Higher EfficiencyANAND KRISHNANÎncă nu există evaluări
- Bes HighligtedDocument61 paginiBes HighligtedswathiÎncă nu există evaluări
- KT3WINDDocument44 paginiKT3WINDAla AwoudaÎncă nu există evaluări
- Wind 2Document16 paginiWind 2Mohammad Azimul HoqueÎncă nu există evaluări
- Final Ppt-Wind PowerDocument33 paginiFinal Ppt-Wind Powerkit1016513010Încă nu există evaluări
- Alternate Energy Activities: A Look at Wind PowerDocument64 paginiAlternate Energy Activities: A Look at Wind PowerK Venkat EshÎncă nu există evaluări
- 2.6 Wind Energy TheoryDocument6 pagini2.6 Wind Energy TheoryAlaa TamimiÎncă nu există evaluări
- Wind Power and Its Science: As One of The Powerful Energy SourcesDocument17 paginiWind Power and Its Science: As One of The Powerful Energy SourcesSakthi SathishÎncă nu există evaluări
- Turby en Application V3.0Document16 paginiTurby en Application V3.0BOEING21Încă nu există evaluări
- Large Scale Renewable Energy Resource: Wind PowerDocument47 paginiLarge Scale Renewable Energy Resource: Wind PowerEezhar JumadiÎncă nu există evaluări
- Lecture3 Wind EnergyDocument47 paginiLecture3 Wind EnergyTze Long GanÎncă nu există evaluări
- Lecture 11 - Wind EnergyDocument45 paginiLecture 11 - Wind EnergyRahim BalouchÎncă nu există evaluări
- EEE565 ProjectReport Group4Document20 paginiEEE565 ProjectReport Group4Atharv ChitkalwarÎncă nu există evaluări
- Bio-Mimetic Wind Turbine BladeDocument10 paginiBio-Mimetic Wind Turbine BladeSANKALP GHARMALKARÎncă nu există evaluări
- Wind AssignmentDocument3 paginiWind AssignmentCp singhÎncă nu există evaluări
- Introduction To Wind Energy Systems PDFDocument15 paginiIntroduction To Wind Energy Systems PDFMiguel Granados MorenoÎncă nu există evaluări
- Vertical Axis Wind Turbine - A StudyDocument14 paginiVertical Axis Wind Turbine - A Studystealth376Încă nu există evaluări
- Chapter 3 Wind EnergyDocument77 paginiChapter 3 Wind EnergyBewnet GetachewÎncă nu există evaluări
- Wind Energy2Document13 paginiWind Energy2Mohamed Al-OdatÎncă nu există evaluări
- Chapter 5 Wind Energy SystemDocument71 paginiChapter 5 Wind Energy SystemMohammad Irfan AliÎncă nu există evaluări
- Iv - Wind EnergyDocument16 paginiIv - Wind Energyckrishna625Încă nu există evaluări
- Group 20 EEE 2K16Document37 paginiGroup 20 EEE 2K16MIGHTY RAJUÎncă nu există evaluări
- s2141627 Ow REPORT Group 20Document23 paginis2141627 Ow REPORT Group 20YEE SENG OWÎncă nu există evaluări
- Wind EnergyDocument8 paginiWind EnergyValenitnÎncă nu există evaluări
- E Paper PDFDocument6 paginiE Paper PDFWayan Dharma W. DianaÎncă nu există evaluări
- Relation Wind Speed and PowerDocument3 paginiRelation Wind Speed and PowerAwais WahabÎncă nu există evaluări
- Wind PowerDocument23 paginiWind PowerDhawal DesaiÎncă nu există evaluări
- ME5521 Chapter4 4 2012Document37 paginiME5521 Chapter4 4 2012Sebastián EspinozaÎncă nu există evaluări
- CH 7 Wind EnergyDocument8 paginiCH 7 Wind EnergyscharichÎncă nu există evaluări
- Basic Operation Principles and ElectricaDocument9 paginiBasic Operation Principles and ElectricaTarak BENSLIMANEÎncă nu există evaluări
- Windmill (Vayu Chakra) ReportDocument73 paginiWindmill (Vayu Chakra) ReportKrish2727krishÎncă nu există evaluări
- UNIT III UTILIZATION OF ELECTRICAL POWER Important QuestionsDocument7 paginiUNIT III UTILIZATION OF ELECTRICAL POWER Important QuestionsKarthikeyan VÎncă nu există evaluări
- Project On Savonious Wind Turbine (L.C.I.T BhanduDocument33 paginiProject On Savonious Wind Turbine (L.C.I.T Bhandupatel ketanÎncă nu există evaluări
- 37bib ArchDocument5 pagini37bib ArchsindhujasanthyÎncă nu există evaluări
- Scientific American Supplement, No. 633, February 18, 1888De la EverandScientific American Supplement, No. 633, February 18, 1888Încă nu există evaluări
- User Manual GC MSD System Operating 5977B Series G7077 90034 en AgilentDocument254 paginiUser Manual GC MSD System Operating 5977B Series G7077 90034 en AgilentMahmoudKamalElshazlyÎncă nu există evaluări
- Soot Formation: Institut Ffir Physikalische Chemic Der Universiti T Gi Ttinoen, 3400 Gbttingen, West German)Document45 paginiSoot Formation: Institut Ffir Physikalische Chemic Der Universiti T Gi Ttinoen, 3400 Gbttingen, West German)MahmoudKamalElshazlyÎncă nu există evaluări
- Assignment M1.1Document1 paginăAssignment M1.1MahmoudKamalElshazlyÎncă nu există evaluări
- Hong-Quan Do, Alessandro Faccinetto, Luc-Sy Tran, Pascale Desgroux, Laurent Gasnot, Abderrahman El Bakali, Xavier MercierDocument15 paginiHong-Quan Do, Alessandro Faccinetto, Luc-Sy Tran, Pascale Desgroux, Laurent Gasnot, Abderrahman El Bakali, Xavier MercierMahmoudKamalElshazlyÎncă nu există evaluări
- FrictionDocument4 paginiFrictionMahmoudKamalElshazlyÎncă nu există evaluări
- Chapter 1 IC ENGINE TESTING PDFDocument56 paginiChapter 1 IC ENGINE TESTING PDFMahmoudKamalElshazlyÎncă nu există evaluări
- Internal Lab 2018Document16 paginiInternal Lab 2018MahmoudKamalElshazlyÎncă nu există evaluări
- Extra Examples Engine PerformanceDocument19 paginiExtra Examples Engine PerformanceMahmoudKamalElshazlyÎncă nu există evaluări
- Chocked Nozzle ExperimentDocument8 paginiChocked Nozzle ExperimentMahmoudKamalElshazlyÎncă nu există evaluări
- Statistical Description of TurbulenceDocument11 paginiStatistical Description of TurbulenceAjmal SalamÎncă nu există evaluări
- Cooling SystemDocument16 paginiCooling SystemMahmoudKamalElshazlyÎncă nu există evaluări
- Valve Selection Types and ClassesDocument71 paginiValve Selection Types and ClassesRaj Bindas100% (2)
- SHOCK Wave TablesDocument10 paginiSHOCK Wave TablesMahmoudKamalElshazlyÎncă nu există evaluări
- Simple Vapor Compression CycleDocument3 paginiSimple Vapor Compression CycleMahmoudKamalElshazlyÎncă nu există evaluări
- Lectures Diesel EnginesDocument81 paginiLectures Diesel EnginesMahmoudKamalElshazlyÎncă nu există evaluări
- NanoDocument8 paginiNanoMahmoudKamalElshazlyÎncă nu există evaluări
- OneDocument17 paginiOneMahmoudKamalElshazlyÎncă nu există evaluări
- CV PDFDocument2 paginiCV PDFMahmoudKamalElshazlyÎncă nu există evaluări
- Antifriction Bearings - 2Document2 paginiAntifriction Bearings - 2MahmoudKamalElshazlyÎncă nu există evaluări
- Research For Renewable Energy and Smart Grid For Region IV - PhilippinesDocument9 paginiResearch For Renewable Energy and Smart Grid For Region IV - PhilippinesJaycee SimonÎncă nu există evaluări
- 1 s2.0 S0960148110003484 MainDocument8 pagini1 s2.0 S0960148110003484 Mainhassan huseinÎncă nu există evaluări
- Chapter 1Document19 paginiChapter 1NishantShahÎncă nu există evaluări
- Review On Wind Power Generation With Doubly Fed Induction GeneratorDocument6 paginiReview On Wind Power Generation With Doubly Fed Induction GeneratorAbhimanyu YadavÎncă nu există evaluări
- Sea Met - Self Installing Meteorological MastDocument11 paginiSea Met - Self Installing Meteorological MastLewis LackÎncă nu există evaluări
- Beka WindDocument55 paginiBeka WindRoffepÎncă nu există evaluări
- Aarhus University 2Document44 paginiAarhus University 2Ánh Thiện TriệuÎncă nu există evaluări
- 1 OnlineDocument12 pagini1 OnlineabdoualhinnawiÎncă nu există evaluări
- SRCC GBO 2022 by CrackuDocument58 paginiSRCC GBO 2022 by CrackuSachin SinghÎncă nu există evaluări
- Design and CFD Analysis of Horizontal Axis Wind Turbine (HAWT)Document1 paginăDesign and CFD Analysis of Horizontal Axis Wind Turbine (HAWT)Christiano ElondoÎncă nu există evaluări
- A Low-Speed, High-Torque, Direct-Drive Permanent Magnet Generator For Wind TurbineDocument8 paginiA Low-Speed, High-Torque, Direct-Drive Permanent Magnet Generator For Wind TurbineHelicon1Încă nu există evaluări
- Lecture 5Document16 paginiLecture 5Fareed KhanÎncă nu există evaluări
- 2 DS104 E 0513 Cell Sites PDFDocument22 pagini2 DS104 E 0513 Cell Sites PDFRodolfo IvanÎncă nu există evaluări
- Mitigation of Harmonic Voltage Amplification in Offshore Wind Power Plants by Wind Turbines With Embedded Active Filters - Guest2019Document10 paginiMitigation of Harmonic Voltage Amplification in Offshore Wind Power Plants by Wind Turbines With Embedded Active Filters - Guest2019Christian JimenezÎncă nu există evaluări
- Nijiri 2016Document17 paginiNijiri 2016Mauricio OhseÎncă nu există evaluări
- COWI Offshore Wind Farms 1125 - CompressedDocument9 paginiCOWI Offshore Wind Farms 1125 - CompressedDhinesh KalaimaranÎncă nu există evaluări
- Page 2 of 83Document82 paginiPage 2 of 83Linh NguyễnÎncă nu există evaluări
- EDP Renewaldes North America Tax Equity Financial Asset Rotation UVAF1757Document28 paginiEDP Renewaldes North America Tax Equity Financial Asset Rotation UVAF1757Kryon CloudÎncă nu există evaluări
- Lifetime Estimation Method For The Power Semiconductors Considering Mission ProfilesDocument10 paginiLifetime Estimation Method For The Power Semiconductors Considering Mission ProfilesLionildo LucyÎncă nu există evaluări
- Andrews-Speed, P., - Hove, A. (2023)Document26 paginiAndrews-Speed, P., - Hove, A. (2023)Miguel Montalván AraozÎncă nu există evaluări
- Applicability of Nacelle Anemometer Measurements For Use in Turbine Power Performance TestsDocument22 paginiApplicability of Nacelle Anemometer Measurements For Use in Turbine Power Performance TestshonyÎncă nu există evaluări
- Wind TurbinesDocument175 paginiWind TurbinesTrexÎncă nu există evaluări
- Koyo Ceramic Catb1013exDocument17 paginiKoyo Ceramic Catb1013exJose DonaireÎncă nu există evaluări
- Chapter3 Tidal TurbinesDocument68 paginiChapter3 Tidal TurbinesDavid BartramÎncă nu există evaluări
- Design Project REPORT ENGR-491&492: Highway Vertical Axis Wind Turbines With Vortex GeneratorsDocument10 paginiDesign Project REPORT ENGR-491&492: Highway Vertical Axis Wind Turbines With Vortex GeneratorsashÎncă nu există evaluări
- Renewable Energy TechnologyDocument283 paginiRenewable Energy Technologymuhannad11061975Încă nu există evaluări
- Quadrotor UAV For Wind Profile Characterization: Moyano Cano, JavierDocument85 paginiQuadrotor UAV For Wind Profile Characterization: Moyano Cano, JavierJuan SebastianÎncă nu există evaluări