S-ar putea să vă placă și
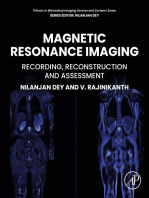
- Magnetic Resonance Imaging: Recording, Reconstruction and AssessmentDe la EverandMagnetic Resonance Imaging: Recording, Reconstruction and AssessmentEvaluare: 5 din 5 stele5/5 (1)
- Here Is My Project ReportDocument14 paginiHere Is My Project ReportAsha PandeyÎncă nu există evaluări
- Classification of Brain Cancer Using Artificial Neural NetworkDocument5 paginiClassification of Brain Cancer Using Artificial Neural NetworkSanthosh H NarasimhaÎncă nu există evaluări
- Minor Project 0th ReviewDocument17 paginiMinor Project 0th ReviewSANSKAR SHARMAÎncă nu există evaluări
- Presentation On Brain Tumor DetectionDocument23 paginiPresentation On Brain Tumor DetectionVekariya DarshanaÎncă nu există evaluări
- Brain Tumor Detection and Classification Using Image Processing TechniquesDocument6 paginiBrain Tumor Detection and Classification Using Image Processing TechniquesUPPUTURI NAGARAJUÎncă nu există evaluări
- Presentation DataDocument10 paginiPresentation DataPrashantyelekarÎncă nu există evaluări
- Brain TumourDocument39 paginiBrain TumourCharitha IddumÎncă nu există evaluări
- Brain Segmentation Using Fuzzy C Means Clustering To Detect Tumour RegionDocument6 paginiBrain Segmentation Using Fuzzy C Means Clustering To Detect Tumour RegionIjarcsee JournalÎncă nu există evaluări
- An Artificial Neural Network Approach For Brain Tumor Detection Using Digital Image SegmentationDocument5 paginiAn Artificial Neural Network Approach For Brain Tumor Detection Using Digital Image SegmentationInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Lung Cancer Dtection Using DIPDocument5 paginiLung Cancer Dtection Using DIPtarunÎncă nu există evaluări
- Ijret - Automatic Detection and Severity Analysis of Brain Tumors Using Gui in MatlabDocument9 paginiIjret - Automatic Detection and Severity Analysis of Brain Tumors Using Gui in MatlabInternational Journal of Research in Engineering and TechnologyÎncă nu există evaluări
- Skin Cancer Full DocumentDocument53 paginiSkin Cancer Full DocumentGhana KiranÎncă nu există evaluări
- Brain Tumor DetectionDocument25 paginiBrain Tumor Detectionrpbhists20Încă nu există evaluări
- Major Project 3Document42 paginiMajor Project 3starktechtony.1111Încă nu există evaluări
- Icmcs14 Submission 10168979/7985498479Document7 paginiIcmcs14 Submission 10168979/7985498479S GÎncă nu există evaluări
- Brain Tumor Detection Using Morphological and Watershed OperatorsDocument5 paginiBrain Tumor Detection Using Morphological and Watershed OperatorsInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Brain Tumor ReportDocument45 paginiBrain Tumor ReportakshataÎncă nu există evaluări
- Identification of Brain Tumor Using Image Processing TechniquesDocument9 paginiIdentification of Brain Tumor Using Image Processing TechniquesRachnaÎncă nu există evaluări
- A Comparative Study of Brain Tumor Segmentation and DetectionDocument10 paginiA Comparative Study of Brain Tumor Segmentation and DetectionVinayaga MoorthyÎncă nu există evaluări
- Research-Paper v3Document3 paginiResearch-Paper v3Anupam DasguptaÎncă nu există evaluări
- Literature Review On Brain Tumor DetectionDocument4 paginiLiterature Review On Brain Tumor Detectionkgtyigvkg100% (1)
- ABSTRACTDocument11 paginiABSTRACTTime PassÎncă nu există evaluări
- Analysis On Methods For Detecting Brain Tumor From MRI ImagesDocument8 paginiAnalysis On Methods For Detecting Brain Tumor From MRI ImagesIJRASETPublicationsÎncă nu există evaluări
- Full DocumentDocument44 paginiFull DocumentSowmya SivasriÎncă nu există evaluări
- Brain Tumor Segmentation ThesisDocument7 paginiBrain Tumor Segmentation Thesisafksooisybobce100% (2)
- CNN Technique For Detecting Alzheimer's Disease by Using MRI ImagesDocument13 paginiCNN Technique For Detecting Alzheimer's Disease by Using MRI Imagesali hamdiÎncă nu există evaluări
- IJMECE160531Document7 paginiIJMECE160531Senthil PÎncă nu există evaluări
- Tumor Detection Through Mri Brain Images: Rohit Arya 20MCS1009Document25 paginiTumor Detection Through Mri Brain Images: Rohit Arya 20MCS1009Rohit AryaÎncă nu există evaluări
- Tracking Algorithm For De-Noising of MR Brain Images: J.Jaya, K.Thanushkodi, M.KarnanDocument6 paginiTracking Algorithm For De-Noising of MR Brain Images: J.Jaya, K.Thanushkodi, M.KarnanKishor BhaduriÎncă nu există evaluări
- Brain Tumour2-1Document17 paginiBrain Tumour2-1Asma ShaikhÎncă nu există evaluări
- Paper 2Document5 paginiPaper 2ZeeshanÎncă nu există evaluări
- Thesis Report On Brain Tumor DetectionDocument8 paginiThesis Report On Brain Tumor DetectionWhatShouldIWriteMyPaperAboutLittleRock100% (2)
- Brain Tumor Extraction From MRI Images Using MATLABDocument4 paginiBrain Tumor Extraction From MRI Images Using MATLABInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- A Masked-Watershed Algorithm For Segmentation of Brain Tumour MR ImagesDocument7 paginiA Masked-Watershed Algorithm For Segmentation of Brain Tumour MR ImagesbudiÎncă nu există evaluări
- Review of MRI-based Brain Tumor Image Segmentation Using Deep Learning MethodsDocument8 paginiReview of MRI-based Brain Tumor Image Segmentation Using Deep Learning MethodsChandan MunirajuÎncă nu există evaluări
- Synopsis Format Brain Tumor JhulelalDocument22 paginiSynopsis Format Brain Tumor Jhulelalraymar2kÎncă nu există evaluări
- Research Paper On Brain Tumor DetectionDocument8 paginiResearch Paper On Brain Tumor Detectiongz8jpg31100% (1)
- Cancers 11 01235 PDFDocument36 paginiCancers 11 01235 PDFfreedom mutepfeÎncă nu există evaluări
- Application of Data Mining Techniques For Medical Image ClassificationDocument8 paginiApplication of Data Mining Techniques For Medical Image Classificationfarhan_nnnnÎncă nu există evaluări
- Kapoor 2017Document4 paginiKapoor 2017Abhishek R BhatÎncă nu există evaluări
- Brain Tumor Detection Using Image Processing: Image Segmentation, Support Vector Machine, Self-Organized Mapping, MRIDocument6 paginiBrain Tumor Detection Using Image Processing: Image Segmentation, Support Vector Machine, Self-Organized Mapping, MRIshital shermaleÎncă nu există evaluări
- Chaudhary2012 PDFDocument5 paginiChaudhary2012 PDFSnehaÎncă nu există evaluări
- Synopsis Brain TumorDocument5 paginiSynopsis Brain TumorDhruv SethiÎncă nu există evaluări
- CSE3999 Technical Answers To Real World Problems Digital Assignment - 7Document19 paginiCSE3999 Technical Answers To Real World Problems Digital Assignment - 7ty juÎncă nu există evaluări
- M.mazhar-M.imran FypDocument8 paginiM.mazhar-M.imran FypMuhammad MazharÎncă nu există evaluări
- Brain Tumor Detection by Using Artificial Neural NetworkDocument6 paginiBrain Tumor Detection by Using Artificial Neural NetworkHaritha ReddyÎncă nu există evaluări
- "Breast Cancer Detection and Segmentation in A Mammogram": AbstractDocument5 pagini"Breast Cancer Detection and Segmentation in A Mammogram": AbstractprakashÎncă nu există evaluări
- A Deep Feature-Based Real-Time System For Alzheimer Disease Stage DetectionDocument19 paginiA Deep Feature-Based Real-Time System For Alzheimer Disease Stage Detectionmozhganeutoop1998Încă nu există evaluări
- Hair Segmentation and Removal in Dermoscopic Images Using Deep LearningDocument11 paginiHair Segmentation and Removal in Dermoscopic Images Using Deep LearningRutuja JadhavÎncă nu există evaluări
- Imageprocessing FinaldocDocument60 paginiImageprocessing FinaldocPattu SCÎncă nu există evaluări
- (IJCST-V5I2P62) : Vrushali Desale, Dongare Vijaykumar, Tushar Bakhale, Kadam Suraj, Dhalpe SomnathDocument3 pagini(IJCST-V5I2P62) : Vrushali Desale, Dongare Vijaykumar, Tushar Bakhale, Kadam Suraj, Dhalpe SomnathEighthSenseGroupÎncă nu există evaluări
- ContentsDocument85 paginiContentsJeevaÎncă nu există evaluări
- Brain Tumor Image Segmentation in MRI Image: IOP Conference Series: Materials Science and EngineeringDocument5 paginiBrain Tumor Image Segmentation in MRI Image: IOP Conference Series: Materials Science and EngineeringJawwad SamiÎncă nu există evaluări
- Fig. 1 MRI Image of Tumour Affected Brain Fig. 2 Grayscale Image of The Fig. 1 Fig. 3 HPF Output of Fig.2 ImageDocument2 paginiFig. 1 MRI Image of Tumour Affected Brain Fig. 2 Grayscale Image of The Fig. 1 Fig. 3 HPF Output of Fig.2 ImagedheerajÎncă nu există evaluări
- Survey Extended Abstract PDFDocument2 paginiSurvey Extended Abstract PDFManoj MkÎncă nu există evaluări
- A Deep Learning Model Based On Concatenation Approach For The Diagnosis of Brain TumorDocument10 paginiA Deep Learning Model Based On Concatenation Approach For The Diagnosis of Brain TumorpavithrÎncă nu există evaluări
- Paper 4-Automated Detection Method For Clustered Microcalcification in Mammogram Image Based On Statistical Textural FeaturesDocument5 paginiPaper 4-Automated Detection Method For Clustered Microcalcification in Mammogram Image Based On Statistical Textural FeaturesIjarai ManagingEditorÎncă nu există evaluări
- Image Processing Techniques For Brain Tumor Detection: A ReviewDocument5 paginiImage Processing Techniques For Brain Tumor Detection: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Synopsis-Brain TumourDocument9 paginiSynopsis-Brain TumourKomalÎncă nu există evaluări
- Tips and Tricks ToonboomDocument57 paginiTips and Tricks Toonboomlimetta09Încă nu există evaluări
- Empowerment Tech LessonsDocument34 paginiEmpowerment Tech LessonsAlyanna De LeonÎncă nu există evaluări
- Basic Relationship PixelsDocument43 paginiBasic Relationship Pixelschaman.singh.ug20Încă nu există evaluări
- What Is The Difference Between CCD and Cmos Image Sensors in A Digital CameraDocument2 paginiWhat Is The Difference Between CCD and Cmos Image Sensors in A Digital Cameraapi-281488866Încă nu există evaluări
- Cgaxis Models Volume 03Document79 paginiCgaxis Models Volume 03Antônio CarotiniÎncă nu există evaluări
- CG Report SampleDocument37 paginiCG Report SamplePRAVEENA LALICHITTIÎncă nu există evaluări
- Chapter 10 Graphics in QB64 PDFDocument5 paginiChapter 10 Graphics in QB64 PDFVishal guptaÎncă nu există evaluări
- Free AutoCAD Tutorials - Isometric Drafting in AutoCAD 2010Document3 paginiFree AutoCAD Tutorials - Isometric Drafting in AutoCAD 2010Vivian KallouÎncă nu există evaluări
- Making 3D Textures PracticalDocument11 paginiMaking 3D Textures PracticalEdan HollisÎncă nu există evaluări
- Python - Tkinter FrameDocument3 paginiPython - Tkinter FrameVizual Ta'limÎncă nu există evaluări
- DIP Lecture8 PDFDocument33 paginiDIP Lecture8 PDFHafiz Shakeel Ahmad AwanÎncă nu există evaluări
- CS6504-SCAD-MSM-by WWW - LearnEngineering.in PDFDocument158 paginiCS6504-SCAD-MSM-by WWW - LearnEngineering.in PDFAlecÎncă nu există evaluări
- Colour Red - Google SearchDocument1 paginăColour Red - Google SearchC•H•A•R•L•O•T•T•E Thompson smythÎncă nu există evaluări
- #Draw Sample Window (White)Document7 pagini#Draw Sample Window (White)tanvir rohanÎncă nu există evaluări
- Course: 601: Computer Graphics: Unit 1. IntroductionDocument2 paginiCourse: 601: Computer Graphics: Unit 1. IntroductionAquamanÎncă nu există evaluări
- 3-D Maps, Geospatial Data and Projections Using MATLABDocument185 pagini3-D Maps, Geospatial Data and Projections Using MATLABkadal ijo100% (1)
- Art AppreciationDocument1 paginăArt AppreciationArben Anthony Quitos SaavedraÎncă nu există evaluări
- BukuDocument16 paginiBukuAviq Baihaqy0% (1)
- Supernatural Iconographies in Nollywood A Study of Selected Nollywood FilmDocument8 paginiSupernatural Iconographies in Nollywood A Study of Selected Nollywood FilmInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Lecture08 OpenCVDocument27 paginiLecture08 OpenCVThoi Ke No DiÎncă nu există evaluări
- Exploring The Real Life Applications of Taylors TheoremDocument26 paginiExploring The Real Life Applications of Taylors TheorempaheldharodÎncă nu există evaluări
- Digital Image Processing: Lab 2: Image Enhancement in The Spatial DomainDocument16 paginiDigital Image Processing: Lab 2: Image Enhancement in The Spatial DomainWaqar TanveerÎncă nu există evaluări
- TLE ReviewerDocument6 paginiTLE ReviewerAngela Clarisse ReyesÎncă nu există evaluări
- Lyric PRO: (R) Evolutionary by DesignDocument2 paginiLyric PRO: (R) Evolutionary by DesignmastelecentroÎncă nu există evaluări
- Ce 490 Introduction To Digital Image Processing Midterm ExamDocument6 paginiCe 490 Introduction To Digital Image Processing Midterm Examsf121596Încă nu există evaluări
- TOR and Specs For SurveyDocument3 paginiTOR and Specs For Surveymchkpp0% (1)
- Digital Image Processing Lab.: Prepared by Miss Rabab Abd Al Rasool Supervised by Dr. Muthana HachimDocument47 paginiDigital Image Processing Lab.: Prepared by Miss Rabab Abd Al Rasool Supervised by Dr. Muthana HachimRishabh BajpaiÎncă nu există evaluări
- 7 Pro Cinema 4D Modelling TipsDocument2 pagini7 Pro Cinema 4D Modelling TipsTim Wei TerkÎncă nu există evaluări
- D.K.T.E. Society's Yashwantrao Chavan Polytechnic, IchalkaranjiDocument13 paginiD.K.T.E. Society's Yashwantrao Chavan Polytechnic, IchalkaranjiRaj RayjadeÎncă nu există evaluări
- Illustrator Foundations - The Art of Vector Graphics, Design and Illustration in IllustratorDocument312 paginiIllustrator Foundations - The Art of Vector Graphics, Design and Illustration in Illustratoryasir9909100% (1)
- Roxane Gay & Everand Originals Presents: Good Girl: Notes on Dog RescueDe la EverandRoxane Gay & Everand Originals Presents: Good Girl: Notes on Dog RescueEvaluare: 4.5 din 5 stele4.5/5 (31)
- Come Back, Como: Winning the Heart of a Reluctant DogDe la EverandCome Back, Como: Winning the Heart of a Reluctant DogEvaluare: 3.5 din 5 stele3.5/5 (10)
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessDe la EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessÎncă nu există evaluări
- Merle's Door: Lessons from a Freethinking DogDe la EverandMerle's Door: Lessons from a Freethinking DogEvaluare: 4 din 5 stele4/5 (326)
- Roxane Gay & Everand Originals Presents: Good Girl: Notes on Dog RescueDe la EverandRoxane Gay & Everand Originals Presents: Good Girl: Notes on Dog RescueEvaluare: 5 din 5 stele5/5 (4)
- The Dog Who Couldn't Stop Loving: How Dogs Have Captured Our Hearts for Thousands of YearsDe la EverandThe Dog Who Couldn't Stop Loving: How Dogs Have Captured Our Hearts for Thousands of YearsÎncă nu există evaluări
- Show Dog: The Charmed Life and Trying Times of a Near-Perfect PurebredDe la EverandShow Dog: The Charmed Life and Trying Times of a Near-Perfect PurebredEvaluare: 3.5 din 5 stele3.5/5 (13)
- Will's Red Coat: The Story of One Old Dog Who Chose to Live AgainDe la EverandWill's Red Coat: The Story of One Old Dog Who Chose to Live AgainEvaluare: 4.5 din 5 stele4.5/5 (18)
- The Dog Listener: Learn How to Communicate with Your Dog for Willing CooperationDe la EverandThe Dog Listener: Learn How to Communicate with Your Dog for Willing CooperationEvaluare: 4 din 5 stele4/5 (37)
- The Lion in the Living Room: How House Cats Tamed Us and Took Over the WorldDe la EverandThe Lion in the Living Room: How House Cats Tamed Us and Took Over the WorldEvaluare: 4.5 din 5 stele4.5/5 (38)
- Dogland: Passion, Glory, and Lots of Slobber at the Westminster Dog ShowDe la EverandDogland: Passion, Glory, and Lots of Slobber at the Westminster Dog ShowÎncă nu există evaluări
- An Eagle Named Freedom: My True Story of a Remarkable FriendshipDe la EverandAn Eagle Named Freedom: My True Story of a Remarkable FriendshipÎncă nu există evaluări
- Second Chances: A Marine, His Dog, and Finding RedemptionDe la EverandSecond Chances: A Marine, His Dog, and Finding RedemptionÎncă nu există evaluări
- Your Dog Is Your Mirror: The Emotional Capacity of Our Dogs and OurselvesDe la EverandYour Dog Is Your Mirror: The Emotional Capacity of Our Dogs and OurselvesEvaluare: 4 din 5 stele4/5 (31)
- Lucky Dog Lessons: Train Your Dog in 7 DaysDe la EverandLucky Dog Lessons: Train Your Dog in 7 DaysEvaluare: 4.5 din 5 stele4.5/5 (41)
- Inside of a Dog: What Dogs See, Smell, and KnowDe la EverandInside of a Dog: What Dogs See, Smell, and KnowEvaluare: 4 din 5 stele4/5 (390)
- The Other End of the Leash: Why We Do What We Do Around DogsDe la EverandThe Other End of the Leash: Why We Do What We Do Around DogsEvaluare: 5 din 5 stele5/5 (65)
- Animals Make Us Human: Creating the Best Life for AnimalsDe la EverandAnimals Make Us Human: Creating the Best Life for AnimalsEvaluare: 4.5 din 5 stele4.5/5 (2)
- Edward's Menagerie: Dogs: 50 canine crochet patternsDe la EverandEdward's Menagerie: Dogs: 50 canine crochet patternsEvaluare: 3 din 5 stele3/5 (5)
- What Cats Want: An Illustrated Guide for Truly Understanding Your CatDe la EverandWhat Cats Want: An Illustrated Guide for Truly Understanding Your CatEvaluare: 4.5 din 5 stele4.5/5 (13)
- I Am Bunny: How a ""Talking"" Dog Taught Me Everything I Need to Know About Being HumanDe la EverandI Am Bunny: How a ""Talking"" Dog Taught Me Everything I Need to Know About Being HumanEvaluare: 4.5 din 5 stele4.5/5 (8)
- All Things Bright and Beautiful: The Warm and Joyful Memoirs of the World's Most Beloved Animal DoctorDe la EverandAll Things Bright and Beautiful: The Warm and Joyful Memoirs of the World's Most Beloved Animal DoctorEvaluare: 4.5 din 5 stele4.5/5 (30)
- Tamed and Untamed: Close Encounters of the Animal KindDe la EverandTamed and Untamed: Close Encounters of the Animal KindEvaluare: 3.5 din 5 stele3.5/5 (32)
- Puppy Training 101: How to Train a Puppy, Training Your Own Psychiatric Service Dog, A Step-By-Step Program so your Pup Will Understand You!De la EverandPuppy Training 101: How to Train a Puppy, Training Your Own Psychiatric Service Dog, A Step-By-Step Program so your Pup Will Understand You!Evaluare: 5 din 5 stele5/5 (85)
- The Stress Factor in Dogs: Unlocking Resiliency and Enhancing Well-BeingDe la EverandThe Stress Factor in Dogs: Unlocking Resiliency and Enhancing Well-BeingEvaluare: 5 din 5 stele5/5 (1)