S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- American Cars 1960-1972Document944 paginiAmerican Cars 1960-1972Caroline Bahna100% (9)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Brake Handbook - Fred PuhnDocument178 paginiBrake Handbook - Fred PuhnGuilherme Pfeilsticker78% (9)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- NX 12 For Engineering Design PDFDocument225 paginiNX 12 For Engineering Design PDFRenan Sartori100% (2)
- Mechanical Model For Quadcopter UAVDocument86 paginiMechanical Model For Quadcopter UAVmatteoragni100% (2)
- 1.dresser Rand Surge ControlDocument4 pagini1.dresser Rand Surge ControlHimawan Sigit NugrohoÎncă nu există evaluări
- Sae J670 2008 PDFDocument73 paginiSae J670 2008 PDFJoão Ferro100% (3)
- QUESTION BANK of Control Systems Engineering PDFDocument12 paginiQUESTION BANK of Control Systems Engineering PDFMouhanit LimbachiyaÎncă nu există evaluări
- Advanced Loads WB CAEADocument29 paginiAdvanced Loads WB CAEAJura PateregaÎncă nu există evaluări
- Artigo - Course of SN-curves Especcially in The High-Cycle Fatigue Regime With Regard To Component Design and Safety PDFDocument13 paginiArtigo - Course of SN-curves Especcially in The High-Cycle Fatigue Regime With Regard To Component Design and Safety PDFRenan SartoriÎncă nu există evaluări
- Prova 2 MarcoDocument6 paginiProva 2 MarcoRenan SartoriÎncă nu există evaluări
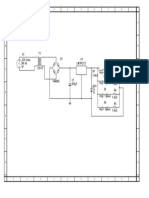
- D1 T1 V1 220 Vrms 60 Hz 0° U1 LM7812CT R1 1.0kΩ S1 Key = Space S2 Key = Space S3 Key = Space S4 Key = Space R2 1.0kΩ R3 1.0kΩ R4 1.0kΩ R5 1.0kΩDocument1 paginăD1 T1 V1 220 Vrms 60 Hz 0° U1 LM7812CT R1 1.0kΩ S1 Key = Space S2 Key = Space S3 Key = Space S4 Key = Space R2 1.0kΩ R3 1.0kΩ R4 1.0kΩ R5 1.0kΩRenan SartoriÎncă nu există evaluări
- On The Mechanism and Mechanics of Wheel Loading in Grinding PDFDocument12 paginiOn The Mechanism and Mechanics of Wheel Loading in Grinding PDFRenan SartoriÎncă nu există evaluări
- Journal PDFDocument16 paginiJournal PDFankit5088Încă nu există evaluări
- Marines 2003Document7 paginiMarines 2003Agustin AvilaÎncă nu există evaluări
- Bissec MDocument1 paginăBissec MRenan SartoriÎncă nu există evaluări
- Carros Americanos 1Document3 paginiCarros Americanos 1Renan SartoriÎncă nu există evaluări
- Matlab OdtDocument3 paginiMatlab OdtRenan SartoriÎncă nu există evaluări
- JacobiDocument1 paginăJacobiRenan SartoriÎncă nu există evaluări
- Apostila - Veiculos NicolazziDocument10 paginiApostila - Veiculos NicolazziRenan SartoriÎncă nu există evaluări
- CAN BUS Steering Gear ControlDocument7 paginiCAN BUS Steering Gear ControlsithulibraÎncă nu există evaluări
- Industrial Drives and ControlDocument42 paginiIndustrial Drives and Controlsreeragks1989100% (1)
- ContentsDocument16 paginiContentsJayanthiRaviÎncă nu există evaluări
- Cruise Control SystemDocument17 paginiCruise Control SystemNaveed IqbalÎncă nu există evaluări
- Chap10 - 2 - Stability of Closed-Loop Control SystemsDocument27 paginiChap10 - 2 - Stability of Closed-Loop Control SystemsSaidÎncă nu există evaluări
- An Introduction To Controls For Steam Power Plants: Course No: D02-003 Credit: 2 PDHDocument30 paginiAn Introduction To Controls For Steam Power Plants: Course No: D02-003 Credit: 2 PDHMKE3 HEROESÎncă nu există evaluări
- Robust and Optimal Control of Linear SystemsDocument18 paginiRobust and Optimal Control of Linear SystemsHesam ZmrdÎncă nu există evaluări
- Jordan Journal of Mechanical and Industrial Engineering (JJMIE), Volume 2, Number 3, Sep. 2008 PDFDocument56 paginiJordan Journal of Mechanical and Industrial Engineering (JJMIE), Volume 2, Number 3, Sep. 2008 PDFHadiBiesÎncă nu există evaluări
- ECP MagLev Model 730Document2 paginiECP MagLev Model 730Jose AlejandroÎncă nu există evaluări
- PLL ManualDocument33 paginiPLL Manualmarcos78arÎncă nu există evaluări
- Siemens Drive FaultDocument249 paginiSiemens Drive Faultfendi_3606100% (1)
- Feedback Control of A Rotary Driven Inverted Pendulum (A.k.a. Pendubot)Document68 paginiFeedback Control of A Rotary Driven Inverted Pendulum (A.k.a. Pendubot)andres riosÎncă nu există evaluări
- Block Diagrams & Signal Flow GraphsDocument47 paginiBlock Diagrams & Signal Flow GraphsMacky Pogi02Încă nu există evaluări
- Figure 3.0 Process Flow Diagram Drying Oil ProductionDocument3 paginiFigure 3.0 Process Flow Diagram Drying Oil ProductionzackwanÎncă nu există evaluări
- Bode Plot Stability AnalysisDocument28 paginiBode Plot Stability AnalysisDeepthiÎncă nu există evaluări
- Quark-Elec GSM Remote Contorller Application Notes-G021Document21 paginiQuark-Elec GSM Remote Contorller Application Notes-G021QuarkelecÎncă nu există evaluări
- Generation of Elementary Discrete Time Sequence With Formula Generation of Elementary Discrete Time Sequence Without FormulaDocument11 paginiGeneration of Elementary Discrete Time Sequence With Formula Generation of Elementary Discrete Time Sequence Without FormulababehackerÎncă nu există evaluări
- Self-Tuning Controllers Simulink LibraryDocument6 paginiSelf-Tuning Controllers Simulink LibraryTran Van ThucÎncă nu există evaluări
- Electronis Formula Book (ErForum)Document82 paginiElectronis Formula Book (ErForum)Sauvik ChakrabortyÎncă nu există evaluări
- Mitra-Ch9 3ed PDFDocument7 paginiMitra-Ch9 3ed PDFDebajyoti DattaÎncă nu există evaluări
- Speed Control of BLDC Motor Using Fuzzy Logic ControllerDocument8 paginiSpeed Control of BLDC Motor Using Fuzzy Logic Controller2K18/EE/244 VIPESH DUNKWALÎncă nu există evaluări
- PID Control Manual 6540Document26 paginiPID Control Manual 6540Lizandro ZapataÎncă nu există evaluări
- Examples 3 PDFDocument2 paginiExamples 3 PDFskaderbe1Încă nu există evaluări
- Lab Report Rotary CompleteDocument22 paginiLab Report Rotary CompleteSyed Farid100% (1)
- Chapter 1: Introduction To Process ControlDocument29 paginiChapter 1: Introduction To Process ControlrrrtttrÎncă nu există evaluări
- HVAC ManualDocument107 paginiHVAC ManualWissam JarmakÎncă nu există evaluări
- A Force-Controllable Compact Actuator Module For A Wearable Hand ExoskeletonDocument6 paginiA Force-Controllable Compact Actuator Module For A Wearable Hand ExoskeletonKAREN DAYANA TRUJILLO BARRIOSÎncă nu există evaluări