S-ar putea să vă placă și
- Design of Synchronous MachinesDocument17 paginiDesign of Synchronous MachinesNiteshNarukaÎncă nu există evaluări
- Vector Group of Transformer: Electrical Notes & ArticlesDocument24 paginiVector Group of Transformer: Electrical Notes & ArticlesRuchir PandeyÎncă nu există evaluări
- Synchronous GeneratorDocument2 paginiSynchronous GeneratorBrandon LoweÎncă nu există evaluări
- Synchronous Machine DesignDocument35 paginiSynchronous Machine DesignvietnhuÎncă nu există evaluări
- Induction Motor Cogging and CrawlingDocument2 paginiInduction Motor Cogging and CrawlingChandaKundaÎncă nu există evaluări
- Basics of Squirrel Cage Induction Motor DesignDocument29 paginiBasics of Squirrel Cage Induction Motor Designरमेश सिंह100% (1)
- Construction of Three Phase Induction MotorDocument18 paginiConstruction of Three Phase Induction MotorRajeev ValunjkarÎncă nu există evaluări
- Electrical Machines Lab ManualDocument37 paginiElectrical Machines Lab ManualAtharv ParanjpeÎncă nu există evaluări
- PMBLDC Motor DriveDocument55 paginiPMBLDC Motor DriveSushant SinghÎncă nu există evaluări
- Electric Machinery Fundamentals Fourth EDocument26 paginiElectric Machinery Fundamentals Fourth EZeeshan RafiqÎncă nu există evaluări
- VFD Types: Igbts ThyristorsDocument8 paginiVFD Types: Igbts ThyristorsAshok MoreÎncă nu există evaluări
- James Hendershot, IEEE Life Fellow Electric Motor Design & Manufacturing ExpertDocument8 paginiJames Hendershot, IEEE Life Fellow Electric Motor Design & Manufacturing ExpertsHORT SHORTÎncă nu există evaluări
- Induction MotorsDocument25 paginiInduction Motorsapi-3827132100% (2)
- Resistor Control of Wound Rotor MotorsDocument11 paginiResistor Control of Wound Rotor MotorsAndré LuizÎncă nu există evaluări
- 开关磁阻电机的ANSOFT建模方法Document28 pagini开关磁阻电机的ANSOFT建模方法Nuwantha FernandoÎncă nu există evaluări
- Reluctance MotorDocument16 paginiReluctance Motorapi-382713280% (5)
- Development of Electric Drives in Light Rail Transit (LRT) SystemDocument31 paginiDevelopment of Electric Drives in Light Rail Transit (LRT) SystemArjun Pratap Singh100% (1)
- AlternatorDocument24 paginiAlternatorJoseEduardoSantaCruzÎncă nu există evaluări
- Electrical Machines 1 Lab Manual May 2015Document129 paginiElectrical Machines 1 Lab Manual May 2015SufiSayyidZakiyahÎncă nu există evaluări
- CH 3 - Induction MotorsDocument46 paginiCH 3 - Induction MotorsMiz AelyfhaÎncă nu există evaluări
- Switched Reluctance Motor (SRM)Document19 paginiSwitched Reluctance Motor (SRM)Chakri SaYs AS50% (2)
- Switched Reluctance Reluctance Motors and ControlDocument47 paginiSwitched Reluctance Reluctance Motors and ControlSreerag Kunnathu Sugathan100% (1)
- Syncgronous Generator UpdatedDocument78 paginiSyncgronous Generator UpdatedarsalÎncă nu există evaluări
- Three Phase Induction Motors: Output Equation of Induction MotorDocument7 paginiThree Phase Induction Motors: Output Equation of Induction MotoraaparumugamÎncă nu există evaluări
- Induction MotorsDocument81 paginiInduction MotorsIdhamtanahbaruÎncă nu există evaluări
- SPEED Electric Machines BrochureDocument8 paginiSPEED Electric Machines Brochure张之政Încă nu există evaluări
- Synchronous Generator Operating ChartDocument4 paginiSynchronous Generator Operating Chartp41005679Încă nu există evaluări
- Induction Motor Tradeoff For VSD Driven Pumps and Fans PDFDocument5 paginiInduction Motor Tradeoff For VSD Driven Pumps and Fans PDFkankokwahÎncă nu există evaluări
- A Three Phase Induction Motor Is Basically A Constant Speed Motor So ItDocument39 paginiA Three Phase Induction Motor Is Basically A Constant Speed Motor So ItManish MakwanaÎncă nu există evaluări
- Synchronous MachineDocument33 paginiSynchronous Machinecrisis_z100% (1)
- Induction Motor: Navigation SearchDocument8 paginiInduction Motor: Navigation SearchSoni Mishra TiwariÎncă nu există evaluări
- Induction Motor Drives: Speed Control MethodsDocument73 paginiInduction Motor Drives: Speed Control MethodsSai Pranahita KulithalaiÎncă nu există evaluări
- Unit2 MachinesDocument35 paginiUnit2 MachinesdineshkumarÎncă nu există evaluări
- Induction Motor Design PDFDocument46 paginiInduction Motor Design PDFdiptiÎncă nu există evaluări
- Calculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsDocument8 paginiCalculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsWalter SantiÎncă nu există evaluări
- Induction Motor Tutorial ProblemsDocument8 paginiInduction Motor Tutorial ProblemsPrakashÎncă nu există evaluări
- 2012 Practical Strategies For Improved Cooling of Electrical Motors and Generators Dave Staton INDUCTICA TECHNICAL CONFERENCE PDFDocument8 pagini2012 Practical Strategies For Improved Cooling of Electrical Motors and Generators Dave Staton INDUCTICA TECHNICAL CONFERENCE PDFuuur35Încă nu există evaluări
- Determining The Efficiency of Induction Machines, Converters and SoftstartersDocument8 paginiDetermining The Efficiency of Induction Machines, Converters and Softstarterssadeq03Încă nu există evaluări
- Project Report For Completion OF B. Tech. in Electrical EngineeringDocument57 paginiProject Report For Completion OF B. Tech. in Electrical EngineeringetasureshÎncă nu există evaluări
- Reluctance MotorDocument14 paginiReluctance Motortheodorakis017781Încă nu există evaluări
- Hysteresis MotorDocument14 paginiHysteresis Motorcamming soon100% (1)
- Synchronous MachinesclassDocument76 paginiSynchronous Machinesclassbhuvana71Încă nu există evaluări
- Principle of Operation of Synchronous Generator - Saravanan T YDocument21 paginiPrinciple of Operation of Synchronous Generator - Saravanan T YStephanie Pena100% (5)
- A Presentation On Turbogenerator and ExcitorDocument15 paginiA Presentation On Turbogenerator and ExcitorPrakhar MehrotraÎncă nu există evaluări
- BNMIT High Voltage Engineering Course OverviewDocument404 paginiBNMIT High Voltage Engineering Course OverviewAbdul JaleelÎncă nu există evaluări
- IEEE Transactions On Magnetics Volume 22 Issue 5 1986 (Doi 10.1109 - Tmag.1986.1064466) Sebastian, T. Slemon, G. Rahman, M. - Modelling of Permanent Magnet Synchronous MotorsDocument3 paginiIEEE Transactions On Magnetics Volume 22 Issue 5 1986 (Doi 10.1109 - Tmag.1986.1064466) Sebastian, T. Slemon, G. Rahman, M. - Modelling of Permanent Magnet Synchronous MotorsmauricetappaÎncă nu există evaluări
- AC Machines Lab Manual PDFDocument91 paginiAC Machines Lab Manual PDFറിജിൽ വി ആർ100% (2)
- Lesson Plan em 2Document3 paginiLesson Plan em 2anbuelectricalÎncă nu există evaluări
- EE360 - Synchronous MachinesDocument85 paginiEE360 - Synchronous MachinesAliAl-jaziriÎncă nu există evaluări
- Symmetrical Components OverviewDocument6 paginiSymmetrical Components OverviewezzateisÎncă nu există evaluări
- Electrical Machine Design Unit1-VKDocument8 paginiElectrical Machine Design Unit1-VKSajidh M ShamsudeenÎncă nu există evaluări
- Variable Speed AC Drives with Inverter Output FiltersDe la EverandVariable Speed AC Drives with Inverter Output FiltersÎncă nu există evaluări
- Optimizing BLDC Motor Design Using GRNN InterpolationDocument7 paginiOptimizing BLDC Motor Design Using GRNN InterpolationBalaji M.Încă nu există evaluări
- RM Bridge CONNECT Edition V11 Update 8 Release NotesDocument21 paginiRM Bridge CONNECT Edition V11 Update 8 Release NotesAve Robin M. RamosÎncă nu există evaluări
- Three Phase Induction Motor Design SoftwareDocument8 paginiThree Phase Induction Motor Design SoftwareNasir ArslanÎncă nu există evaluări
- Design of PM Synchronous and Brushless DC MotorsDocument8 paginiDesign of PM Synchronous and Brushless DC MotorsEdinson VasquezÎncă nu există evaluări
- CAD-Based Parametric Designer for Gas Turbine Engine MDODocument10 paginiCAD-Based Parametric Designer for Gas Turbine Engine MDOValiyakattel NilsÎncă nu există evaluări
- Using Model-Based Design For Digital Twins To Predict The Real-TimeDocument7 paginiUsing Model-Based Design For Digital Twins To Predict The Real-TimeQingzhong GaoÎncă nu există evaluări
- Design Tool For A Didactic Project Related To InteDocument9 paginiDesign Tool For A Didactic Project Related To Intetranquanglinhtql0710Încă nu există evaluări
- Body Language Based Individual Identification in Video Using Gait and Actions PDFDocument8 paginiBody Language Based Individual Identification in Video Using Gait and Actions PDFAce TobikumaÎncă nu există evaluări
- Human Motion Tracking & Evaluation Using Kinect V2 SensorDocument4 paginiHuman Motion Tracking & Evaluation Using Kinect V2 SensorAce TobikumaÎncă nu există evaluări
- 07319925Document5 pagini07319925Ace TobikumaÎncă nu există evaluări
- Measuring ProductivityDocument156 paginiMeasuring ProductivityAredaÎncă nu există evaluări
- Payment and Banking Mobile Personal DeviceDocument7 paginiPayment and Banking Mobile Personal DeviceAce TobikumaÎncă nu există evaluări
- Total Factor Productivity Estimation A Practical ReviewDocument49 paginiTotal Factor Productivity Estimation A Practical ReviewAce TobikumaÎncă nu există evaluări
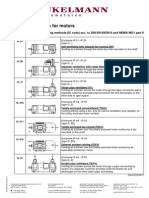
- Cooling Methods For Motors: Classification of The Cooling Methods (IC Code) Acc. To DIN EN 60034-6 and NEMA MG1 Part 6Document1 paginăCooling Methods For Motors: Classification of The Cooling Methods (IC Code) Acc. To DIN EN 60034-6 and NEMA MG1 Part 6electworldÎncă nu există evaluări
- Teachyourselfcs ComDocument5 paginiTeachyourselfcs ComAce TobikumaÎncă nu există evaluări
- Flux Core Arc Welding (FCAW)Document13 paginiFlux Core Arc Welding (FCAW)Ace TobikumaÎncă nu există evaluări
- Deep Learning For Smart Manufacturing: Methods and ApplicationsDocument14 paginiDeep Learning For Smart Manufacturing: Methods and ApplicationsAce TobikumaÎncă nu există evaluări
- Bioprinting A BeginningDocument5 paginiBioprinting A BeginningAce TobikumaÎncă nu există evaluări
- Interfacing DEIF Equipment, Application Notes 4189340670 UK - 2013.01.23 PDFDocument49 paginiInterfacing DEIF Equipment, Application Notes 4189340670 UK - 2013.01.23 PDFHarish De Silva100% (1)
- Decibel ⇄ Linear Conversions for Cable SystemsDocument10 paginiDecibel ⇄ Linear Conversions for Cable SystemsHoussem TeberÎncă nu există evaluări
- Milenium Carlyle PDFDocument21 paginiMilenium Carlyle PDFvickers100% (1)
- SIL3 24/220Vdc/Vac Transistor-Out Detector: Technical DataDocument2 paginiSIL3 24/220Vdc/Vac Transistor-Out Detector: Technical DataMohamed OmarÎncă nu există evaluări
- Fire AlarmDocument39 paginiFire AlarmNisha LambaÎncă nu există evaluări
- NA Unit-IIDocument44 paginiNA Unit-IIvijayalakshmiv VEMURIÎncă nu există evaluări
- 2021 SSN Combo Spa 28462 Control Base Repair GuideDocument46 pagini2021 SSN Combo Spa 28462 Control Base Repair Guidekawon871Încă nu există evaluări
- Technical Solution: Hebei Kaixiang Electrical Technology Co., LTDDocument10 paginiTechnical Solution: Hebei Kaixiang Electrical Technology Co., LTDanon_579053479Încă nu există evaluări
- Va1da en M B001Document12 paginiVa1da en M B001cokicisneÎncă nu există evaluări
- Relay - 7VK610 - Vasudev Power-Typical SettingsDocument1 paginăRelay - 7VK610 - Vasudev Power-Typical SettingsVaibhav kumbharÎncă nu există evaluări
- Reflecting on STEM ExhibitsDocument5 paginiReflecting on STEM ExhibitsJohn Rick JuanÎncă nu există evaluări
- Operating Instructions For The SX-218-K Audio Multi-Channel ReceiverDocument2 paginiOperating Instructions For The SX-218-K Audio Multi-Channel ReceiverPiero CaprettiÎncă nu există evaluări
- Task 1 - Electromagnetic Waves in Open Media: Carlos Arley MendezDocument10 paginiTask 1 - Electromagnetic Waves in Open Media: Carlos Arley Mendezjair jimenezÎncă nu există evaluări
- Rangkaian Pembagi Tegangan Dan Arus: Voltage and Current Divider CircuitDocument17 paginiRangkaian Pembagi Tegangan Dan Arus: Voltage and Current Divider Circuitali muhammad hanafiyahÎncă nu există evaluări
- Digital Indicator Display for Process MonitoringDocument3 paginiDigital Indicator Display for Process Monitoringluat1983Încă nu există evaluări
- WinnerDocument26 paginiWinnerNguyễn Tấn PhátÎncă nu există evaluări
- CN174 Ribbon CableDocument1 paginăCN174 Ribbon CableAymen CheffiÎncă nu există evaluări
- Solved Exercises of Power PDFDocument41 paginiSolved Exercises of Power PDFJhonn CanazaÎncă nu există evaluări
- Power Your Signal: Antenna SpecificationsDocument3 paginiPower Your Signal: Antenna SpecificationsAntonÎncă nu există evaluări
- Washing Machine Service Manual 2000Document56 paginiWashing Machine Service Manual 2000Mile ĐorđevićÎncă nu există evaluări
- Philips Fwd796 Service ManualDocument66 paginiPhilips Fwd796 Service ManualEdilberto AvilaÎncă nu există evaluări
- Hosting Capacity TechniquesDocument46 paginiHosting Capacity TechniquesGODFREYÎncă nu există evaluări
- Saab G3 User Manual PDFDocument110 paginiSaab G3 User Manual PDFAnonymous nC9gpUWPÎncă nu există evaluări
- Power Interruption Reports in MIMAROPADocument4 paginiPower Interruption Reports in MIMAROPAcedro08Încă nu există evaluări
- Transformer Regulation & Losses Calcualation (As Per Transformer Name Plate)Document4 paginiTransformer Regulation & Losses Calcualation (As Per Transformer Name Plate)AnilÎncă nu există evaluări
- BAS I&M GuideDocument90 paginiBAS I&M GuideGreg WilliamsÎncă nu există evaluări
- Design of A Multiband Quasi-Yagi-Type Antenna With CPW-to-CPS TransitionDocument4 paginiDesign of A Multiband Quasi-Yagi-Type Antenna With CPW-to-CPS TransitionTâm Trần ĐứcÎncă nu există evaluări
- Introduction To Encoding and DecodingDocument13 paginiIntroduction To Encoding and DecodingSusmitha Cherukuri0% (1)
- Grundfos Data Sheet: CM PM1 Booster (Stainless Steel)Document2 paginiGrundfos Data Sheet: CM PM1 Booster (Stainless Steel)Adun Nursalim100% (1)
- 10-6000MHz Wideband Transformer TCM1-63AXDocument1 pagină10-6000MHz Wideband Transformer TCM1-63AXMichael Dave MyersÎncă nu există evaluări