S-ar putea să vă placă și
- Calculus on Heisenberg Manifolds. (AM-119), Volume 119De la EverandCalculus on Heisenberg Manifolds. (AM-119), Volume 119Încă nu există evaluări
- Robot Manipulators: Modeling, Performance Analysis and ControlDe la EverandRobot Manipulators: Modeling, Performance Analysis and ControlÎncă nu există evaluări
- Flexural M O T I O N of A Radially Rotating Beam Attached T O A Rigid BodyDocument10 paginiFlexural M O T I O N of A Radially Rotating Beam Attached T O A Rigid BodyAkshat RastogiÎncă nu există evaluări
- Free Vibration of Curved Beam With Varying Curvature and Taper RatioDocument14 paginiFree Vibration of Curved Beam With Varying Curvature and Taper RatioAnil MaliÎncă nu există evaluări
- Study of Rotor-Bearing Systems Using Campbell DiagramDocument4 paginiStudy of Rotor-Bearing Systems Using Campbell DiagrammishraenggÎncă nu există evaluări
- Orris 1973Document20 paginiOrris 1973Supantho ChaudhuriÎncă nu există evaluări
- Master-Slave Approach For The Modelling of Joints With Dependent Degrees of Freedom in Exible MechanismsDocument14 paginiMaster-Slave Approach For The Modelling of Joints With Dependent Degrees of Freedom in Exible MechanismsGabrielÎncă nu există evaluări
- Nonlinear Free Vibration Response of Doubly Curved LaminatedDocument6 paginiNonlinear Free Vibration Response of Doubly Curved LaminatedVenkata Swamy Naidu NeigapulaÎncă nu există evaluări
- 2-67-1380635423-13. Calculating Static Deflection - FullDocument12 pagini2-67-1380635423-13. Calculating Static Deflection - Fullniaz kilamÎncă nu există evaluări
- PH Curves FaroukiDocument50 paginiPH Curves FaroukiasdfghlkjÎncă nu există evaluări
- Fifth International Congress On Sound and Vibration: Howard@vesta - Curtin. Edu - AuDocument9 paginiFifth International Congress On Sound and Vibration: Howard@vesta - Curtin. Edu - AuJigneshÎncă nu există evaluări
- Gupta Theory Longitudinal Photons Quantum Electrodynamics 1950Document12 paginiGupta Theory Longitudinal Photons Quantum Electrodynamics 1950Ulf KleinÎncă nu există evaluări
- Mechanical Analog To Ion TrapDocument9 paginiMechanical Analog To Ion TrapDewang Manohar SukhadareÎncă nu există evaluări
- Finite Element Analysis of Natural Whirl Speeds of Rotating ShaftsDocument7 paginiFinite Element Analysis of Natural Whirl Speeds of Rotating ShaftsmanojÎncă nu există evaluări
- Vibration of Non-Uniform Rods An - TuyenDocument14 paginiVibration of Non-Uniform Rods An - TuyenNguyen Danh TuyenÎncă nu există evaluări
- 1 s2.0 002074037090024X MainDocument8 pagini1 s2.0 002074037090024X MainFAIZÎncă nu există evaluări
- Louise Dolan and Peter Goddard - Tree and Loop Amplitudes in Open Twistor String TheoryDocument54 paginiLouise Dolan and Peter Goddard - Tree and Loop Amplitudes in Open Twistor String TheoryGum0000Încă nu există evaluări
- 1999RIGAUD EffectsGearboxDesignParametersDocument6 pagini1999RIGAUD EffectsGearboxDesignParametersSh.nasirpurÎncă nu există evaluări
- LNH5 - 1996 - Dyn - Amic Finite Element Analysis of A - Chang, Liu - ScienceDocument16 paginiLNH5 - 1996 - Dyn - Amic Finite Element Analysis of A - Chang, Liu - ScienceharshadÎncă nu există evaluări
- Analysis of Flexible Multibody Systems With Spatial Beams Using Mixed Variational PrinciplesDocument20 paginiAnalysis of Flexible Multibody Systems With Spatial Beams Using Mixed Variational PrinciplesnevinkoshyÎncă nu există evaluări
- Bhat 1985Document7 paginiBhat 1985Supantho ChaudhuriÎncă nu există evaluări
- Geometrically Exact 3D Beam Theory: Implementation of A Strain-Invariant Finite Element For Statics and DynamicsDocument31 paginiGeometrically Exact 3D Beam Theory: Implementation of A Strain-Invariant Finite Element For Statics and DynamicsAleff Gonçalves QuintinoÎncă nu există evaluări
- Circular Array ElliottDocument28 paginiCircular Array ElliottmanehsanÎncă nu există evaluări
- Experimental Title: Bifilar and Trifilar SuspensionsDocument34 paginiExperimental Title: Bifilar and Trifilar SuspensionsLue niÎncă nu există evaluări
- IntroductionDocument9 paginiIntroductionJM085Încă nu există evaluări
- Modeling and Analysis of A Jeffcott Rotor As A Continuous Cantilever Beam and An Unbalanced Disk System (#98112) - 83763Document9 paginiModeling and Analysis of A Jeffcott Rotor As A Continuous Cantilever Beam and An Unbalanced Disk System (#98112) - 83763YasirÎncă nu există evaluări
- 1-Wave Propagation in A Curved Waveguide With Arbitrary Dielectric Transverse ProfilesDocument20 pagini1-Wave Propagation in A Curved Waveguide With Arbitrary Dielectric Transverse ProfilesNaserYousefzadehÎncă nu există evaluări
- FiltrostransformationDocument6 paginiFiltrostransformationDiana PrietoÎncă nu există evaluări
- Steven Miller Et Al - Infrared Emissions of H3 + in The Atmosphere of Jupiter in The 2.1 and 4.0 Micron RegionDocument20 paginiSteven Miller Et Al - Infrared Emissions of H3 + in The Atmosphere of Jupiter in The 2.1 and 4.0 Micron RegionPassammÎncă nu există evaluări
- Trifilar Experiment: Submitted by Prakhar Gupta 2008UME139 M2Document11 paginiTrifilar Experiment: Submitted by Prakhar Gupta 2008UME139 M2HLMOPTUW0% (1)
- Wave Scattering in Porous Media and Shape Reconstruction of ScatterersDocument6 paginiWave Scattering in Porous Media and Shape Reconstruction of ScatterersUmed Abd-alsatarÎncă nu există evaluări
- Lab Report Triffilliarc PDFDocument17 paginiLab Report Triffilliarc PDFsohail parachaÎncă nu există evaluări
- Application of Differential Transform Method in Free Vibration Analysis of Rotating Non-Prismatic BeamsDocument8 paginiApplication of Differential Transform Method in Free Vibration Analysis of Rotating Non-Prismatic BeamsKhairul Anuar RahmanÎncă nu există evaluări
- 1 s2.0 0094114X82900465 MainDocument7 pagini1 s2.0 0094114X82900465 MainAnonymous 80p9OVÎncă nu există evaluări
- Spectra and Pseudospectra of Waveform Relaxation OperatorsDocument19 paginiSpectra and Pseudospectra of Waveform Relaxation OperatorsShalini GuptaÎncă nu există evaluări
- C. Ruth Le Sueuer Et Al - On The Use of Variational Wavefunctions in Calculating Vibrational Band IntensitiesDocument10 paginiC. Ruth Le Sueuer Et Al - On The Use of Variational Wavefunctions in Calculating Vibrational Band IntensitiesPassammÎncă nu există evaluări
- The Torsion Pendulum (One or Two Weights)Document10 paginiThe Torsion Pendulum (One or Two Weights)DIPESHÎncă nu există evaluări
- Analysis of Limit Cycle Flutter of An Airfoil in Incompressible FlowDocument13 paginiAnalysis of Limit Cycle Flutter of An Airfoil in Incompressible FlowallentvmÎncă nu există evaluări
- Double SuspendedBifilar PendulumDocument5 paginiDouble SuspendedBifilar PendulumZaeem Ul IslamÎncă nu există evaluări
- Closed-Form Expressions For Computer-Aided Design of Microstrip Ring AntennasDocument11 paginiClosed-Form Expressions For Computer-Aided Design of Microstrip Ring AntennasHüseyin Nuri GülmezÎncă nu există evaluări
- 1996, Inaudi and Makris, Time-Domain Analysis of Linear Hysteretic DampingDocument17 pagini1996, Inaudi and Makris, Time-Domain Analysis of Linear Hysteretic DampingRizqy AgungÎncă nu există evaluări
- Spinning FieldDocument15 paginiSpinning Fieldmkrinker1296100% (1)
- Hoa 1979Document13 paginiHoa 1979Ciprian ComanÎncă nu există evaluări
- Discretization To Avoid Singularities in Vibration-Rotation Hamiltonians: Bisector Embedding For AB2 TriatomicsDocument12 paginiDiscretization To Avoid Singularities in Vibration-Rotation Hamiltonians: Bisector Embedding For AB2 TriatomicsPassammÎncă nu există evaluări
- A Timoshenko Beam ElementDocument13 paginiA Timoshenko Beam ElementPavan KishoreÎncă nu există evaluări
- 02 06072103 Riabi T BDocument19 pagini02 06072103 Riabi T BSandip MaityÎncă nu există evaluări
- Composite Cantilever PlatesDocument7 paginiComposite Cantilever PlatesDharmeswar SahÎncă nu există evaluări
- Numerical Anaysis of AntennaDocument4 paginiNumerical Anaysis of AntennaRajasekhar NvÎncă nu există evaluări
- New Method of Data Treatment Related To Induction Machine Bearing Fault Using Axial Vibration Analytic SignalDocument5 paginiNew Method of Data Treatment Related To Induction Machine Bearing Fault Using Axial Vibration Analytic Signallaribi souadÎncă nu există evaluări
- 小论文 - Modeling of flexible non-linear dynamic links in Nano-Positioning Motion SystemsDocument10 pagini小论文 - Modeling of flexible non-linear dynamic links in Nano-Positioning Motion Systems侯涛Încă nu există evaluări
- RR Solution For Sym Angle-Ply - Liew Et AlDocument14 paginiRR Solution For Sym Angle-Ply - Liew Et AlnadipallsrirajÎncă nu există evaluări
- Calculation of Electron Paramagnetic Resonance Spectra From Brownian Dynamics Trajectories Application To Nitroxide Side Chains in ProteinsDocument12 paginiCalculation of Electron Paramagnetic Resonance Spectra From Brownian Dynamics Trajectories Application To Nitroxide Side Chains in ProteinsIon DerivolcovÎncă nu există evaluări
- J Astrophys Astr v01Document194 paginiJ Astrophys Astr v01yu3zaÎncă nu există evaluări
- 344-Article Text-1317-2-10-20220621Document26 pagini344-Article Text-1317-2-10-20220621Kayiin NanaÎncă nu există evaluări
- CCP6 SlavaDocument10 paginiCCP6 SlavaAndres PalchucanÎncă nu există evaluări
- Bending Analysis of A Wire Strand Analytic ModelDocument10 paginiBending Analysis of A Wire Strand Analytic ModelJosé Cléber Rodrigues da SilvaÎncă nu există evaluări
- HP Lab Report TrifilarDocument11 paginiHP Lab Report TrifilarHorciuxes IraniÎncă nu există evaluări
- Hysteretic Damping Modelling by Nonlinear Kelvin-Voigt ModelDocument6 paginiHysteretic Damping Modelling by Nonlinear Kelvin-Voigt ModelPaul Pinedo VilcahuamánÎncă nu există evaluări
- Farabi - Dynamicstudyofat - Dynamicstudyofat 35413307Document7 paginiFarabi - Dynamicstudyofat - Dynamicstudyofat 35413307Anonymous 80p9OVÎncă nu există evaluări
- Weak Interaction of Elementary Particles: International Series of Monographs in Natural PhilosophyDe la EverandWeak Interaction of Elementary Particles: International Series of Monographs in Natural PhilosophyÎncă nu există evaluări
- Juli - Facebook SearchDocument1 paginăJuli - Facebook SearchHassanImranÎncă nu există evaluări
- Cambridge University Surfing Society - CUSS - HomeDocument1 paginăCambridge University Surfing Society - CUSS - HomeHassanImranÎncă nu există evaluări
- How To Build A Net Zero Startup With Carbon13: For Founders From A Corporate or Entrepreneurial BackgroundDocument1 paginăHow To Build A Net Zero Startup With Carbon13: For Founders From A Corporate or Entrepreneurial BackgroundHassanImranÎncă nu există evaluări
- Buy Mochi Little Moon Ice Cream - Google SearchDocument1 paginăBuy Mochi Little Moon Ice Cream - Google SearchHassanImranÎncă nu există evaluări
- Find FriendsDocument1 paginăFind FriendsHassanImranÎncă nu există evaluări
- Lion's Mane Mushroom Hericium Erinaceus Medicinal - Etsy UKDocument1 paginăLion's Mane Mushroom Hericium Erinaceus Medicinal - Etsy UKHassanImranÎncă nu există evaluări
- Deriving Solar Power From Jellyfish, Algae, and BacteriaDocument1 paginăDeriving Solar Power From Jellyfish, Algae, and BacteriaHassanImranÎncă nu există evaluări
- Bose Quietcomfo" Earbuds 2 ReviewDocument1 paginăBose Quietcomfo" Earbuds 2 ReviewHassanImranÎncă nu există evaluări
- PartiaDocument2 paginiPartiaHassanImranÎncă nu există evaluări
- Ve Project Examples of Proposal Logframe Workplan and Budget Updated 3Document17 paginiVe Project Examples of Proposal Logframe Workplan and Budget Updated 3api-343490696Încă nu există evaluări
- ArtemisDocument1 paginăArtemisHassanImranÎncă nu există evaluări
- Lectures Proposed by The Board of The Faculty of Mathematics Mathematical Tripos, Part IaDocument2 paginiLectures Proposed by The Board of The Faculty of Mathematics Mathematical Tripos, Part IaHassanImranÎncă nu există evaluări
- Design Exercise Sketch (To Be Tidied Up)Document1 paginăDesign Exercise Sketch (To Be Tidied Up)HassanImranÎncă nu există evaluări
- Cued Newcomers Guide 2019 PDFDocument17 paginiCued Newcomers Guide 2019 PDFHassanImranÎncă nu există evaluări
- Mechanicsofmaterialssi9theditionhibbelersolutionsmanual 180118182732 PDFDocument42 paginiMechanicsofmaterialssi9theditionhibbelersolutionsmanual 180118182732 PDFHassanImranÎncă nu există evaluări
- H1038 Programming For Engineers: InstructionsDocument3 paginiH1038 Programming For Engineers: InstructionsHassanImranÎncă nu există evaluări
- Ebook4Expert Ebook CollectionDocument181 paginiEbook4Expert Ebook CollectionHassanImranÎncă nu există evaluări
- 81621162Document7 pagini81621162HassanImranÎncă nu există evaluări
- Primary Particles and Aggregate SizeDocument12 paginiPrimary Particles and Aggregate SizeHassanImranÎncă nu există evaluări
- 0705 2894 PDFDocument14 pagini0705 2894 PDFHassanImranÎncă nu există evaluări
- Vector Calculus and PDEs (Not Annotated)Document48 paginiVector Calculus and PDEs (Not Annotated)HassanImranÎncă nu există evaluări
- Butt Et Al-2011-European Journal of Pain SupplementsDocument2 paginiButt Et Al-2011-European Journal of Pain SupplementsHassanImranÎncă nu există evaluări
- Sample Drawing PDFDocument1 paginăSample Drawing PDFHassanImranÎncă nu există evaluări
- SolidworksDocument1 paginăSolidworksHassanImranÎncă nu există evaluări
- Frequency DomainDocument37 paginiFrequency DomainHassanImranÎncă nu există evaluări
- Complex-Damped Dynamic Systems in The Time and Frequency DomainsDocument18 paginiComplex-Damped Dynamic Systems in The Time and Frequency DomainsHassanImranÎncă nu există evaluări
- 3.6 Homogeneous Linear EquationsDocument3 pagini3.6 Homogeneous Linear EquationsHassanImranÎncă nu există evaluări
- 428 Green Frontiers 14Document11 pagini428 Green Frontiers 14HassanImranÎncă nu există evaluări
- Vib Bas ExcitationDocument11 paginiVib Bas ExcitationHassanImranÎncă nu există evaluări
- CSC 211 ManualDocument48 paginiCSC 211 Manualsgshekar30Încă nu există evaluări
- Bam-1020 Power RequirementsDocument1 paginăBam-1020 Power RequirementsCesar LizarazoÎncă nu există evaluări
- Physics Lab Manual Ohm'S Law: Exp. No: 1 Date: AimDocument54 paginiPhysics Lab Manual Ohm'S Law: Exp. No: 1 Date: Aimvenkatesh jothiÎncă nu există evaluări
- Module 7 - Ac Parallel Circuits Conyaining InductanceDocument9 paginiModule 7 - Ac Parallel Circuits Conyaining InductanceMARY JOY MAGAWAYÎncă nu există evaluări
- 9-Drilling Fluids & Rig HydraulicsDocument48 pagini9-Drilling Fluids & Rig HydraulicsazizsarshoghÎncă nu există evaluări
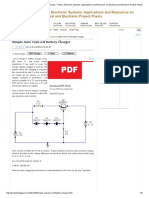
- Simple Auto Turn-Off Battery ChargerDocument5 paginiSimple Auto Turn-Off Battery ChargerdewasuryantoÎncă nu există evaluări
- Explanation TextDocument1 paginăExplanation TextTrianda Ayuning Tyas100% (1)
- Flux Mag 53 enDocument18 paginiFlux Mag 53 enЛадо КиладзеÎncă nu există evaluări
- Datasheet PWM PDFDocument38 paginiDatasheet PWM PDFEdnaelson SilvaÎncă nu există evaluări
- Dynamics of Rigid BodiesDocument9 paginiDynamics of Rigid BodiesJifford Rois HernanÎncă nu există evaluări
- DC Current Interruption in HVDC SF6 Gas MRTB by Means of Self-Excited Oscillation SuperimpositionDocument7 paginiDC Current Interruption in HVDC SF6 Gas MRTB by Means of Self-Excited Oscillation SuperimpositionaÎncă nu există evaluări
- Experiment 4 Cross Flow Heat ExchangerDocument19 paginiExperiment 4 Cross Flow Heat Exchangerbeasturs1Încă nu există evaluări
- Vibration Measurement EquipmentsDocument19 paginiVibration Measurement EquipmentsReyvel MugarÎncă nu există evaluări
- The Operational Amplifier in CommutationDocument6 paginiThe Operational Amplifier in CommutationJugurthaHadjarÎncă nu există evaluări
- Exp1 (Final) PDFDocument15 paginiExp1 (Final) PDFZaidÎncă nu există evaluări
- Method Statement For Testing & Commissioning of Fresh Air Handling Units FAHUs With Heat Recovery Wheel SystemDocument4 paginiMethod Statement For Testing & Commissioning of Fresh Air Handling Units FAHUs With Heat Recovery Wheel Systemvin ssÎncă nu există evaluări
- IB Group 4 (Ess+Physics)Document5 paginiIB Group 4 (Ess+Physics)Nurul Eby AzieraÎncă nu există evaluări
- LM317M DDocument14 paginiLM317M DVinícius BardellaÎncă nu există evaluări
- Chapter 2Document17 paginiChapter 2api-239026214Încă nu există evaluări
- Kelas 15 Oktober 2021 With AnswerDocument5 paginiKelas 15 Oktober 2021 With Answeralia azizÎncă nu există evaluări
- Instruction Manual: Oil-Lubricated Rotary Vane Vacuum Pumps RA 0160 D, RA 0202 D, RA 0250 D, RA 0302 DDocument32 paginiInstruction Manual: Oil-Lubricated Rotary Vane Vacuum Pumps RA 0160 D, RA 0202 D, RA 0250 D, RA 0302 DYunisÎncă nu există evaluări
- Interview Questions InstrumentDocument53 paginiInterview Questions InstrumentQamar Hassan IqbalÎncă nu există evaluări
- ACI522RDocument5 paginiACI522Rraja qammarÎncă nu există evaluări
- CE-EMC Test ReportDocument97 paginiCE-EMC Test ReportDuy ChuÎncă nu există evaluări
- Semiconductors Properties PDFDocument87 paginiSemiconductors Properties PDFKarthika SathishÎncă nu există evaluări
- A Numerical Model For Thermal-Hydraulic Design of A Shell and Single Pass Low Finned Tube Bundle Heat ExchangerDocument27 paginiA Numerical Model For Thermal-Hydraulic Design of A Shell and Single Pass Low Finned Tube Bundle Heat ExchangerSilvio PeluffoÎncă nu există evaluări
- Dewa Testing ProcedureDocument27 paginiDewa Testing ProcedureramÎncă nu există evaluări
- Thermal QnsDocument2 paginiThermal Qnsarul343Încă nu există evaluări
- DLP Q1 WK 4 D3 (16) AdelineDocument8 paginiDLP Q1 WK 4 D3 (16) AdelineCathy MoronioÎncă nu există evaluări
- BPhO Round 1 Section 2 Nov 2015 16 FinalDocument7 paginiBPhO Round 1 Section 2 Nov 2015 16 FinalShatoÎncă nu există evaluări