S-ar putea să vă placă și
- Examen IE5 Janvier 2020 FinalDocument14 paginiExamen IE5 Janvier 2020 FinalDhafer MezghaniÎncă nu există evaluări
- ExamSys1 LMD 2011 2012 EpreuveCorrigeDocument4 paginiExamSys1 LMD 2011 2012 EpreuveCorrigeIdrissa Kouyaté100% (1)
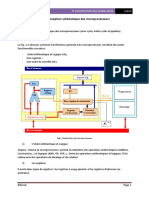
- TP3: Conception Schématique Des Microprocesseurs: ObjectifDocument6 paginiTP3: Conception Schématique Des Microprocesseurs: ObjectifDor SafÎncă nu există evaluări
- TP 3: Gestion Des Processus: 1. Environnement de TravailDocument11 paginiTP 3: Gestion Des Processus: 1. Environnement de TravailsalmaÎncă nu există evaluări
- Correction Partiel 2012 2013Document5 paginiCorrection Partiel 2012 2013Anonymous NSeuaSÎncă nu există evaluări
- 6 17 2015 SolutionDocument5 pagini6 17 2015 SolutionFranc ZogningÎncă nu există evaluări
- 6 16 2016 SolutionDocument5 pagini6 16 2016 SolutionAymen KhaledÎncă nu există evaluări
- Ch5-Gestion Des Entrées SortiesDocument11 paginiCh5-Gestion Des Entrées Sortiesb hamidÎncă nu există evaluări
- TD 2Document5 paginiTD 2Ab YayaÎncă nu există evaluări
- Corrigé de L'examen de Rattrapage de Systèmes D'exploitation 2Document4 paginiCorrigé de L'examen de Rattrapage de Systèmes D'exploitation 2Bandbserv MoreÎncă nu există evaluări
- 7 ExercicesDocument5 pagini7 ExercicesRafik BoumiÎncă nu există evaluări
- Corrige Exam 2005Document6 paginiCorrige Exam 2005Yassine AmrÎncă nu există evaluări
- TD5-correction Mémoire Paginaion Iset NabDocument4 paginiTD5-correction Mémoire Paginaion Iset NabZi EdÎncă nu există evaluări
- TD6 Gestion de La MemoireDocument3 paginiTD6 Gestion de La MemoireMahamat Souradje saleh100% (1)
- Solutionnaire Archi TD1Document5 paginiSolutionnaire Archi TD1Colmain Nassiri100% (1)
- TD Systèmes D EXPLOITATIONDocument2 paginiTD Systèmes D EXPLOITATIONmamadou dioufÎncă nu există evaluări
- Corrigé Type de Lexamen SE1 - L2 - MI - 2020 2021Document4 paginiCorrigé Type de Lexamen SE1 - L2 - MI - 2020 2021Wich River100% (1)
- Fiche TD N°2Document8 paginiFiche TD N°2sadl urh100% (1)
- Serie de TD 1Document2 paginiSerie de TD 1Colmain NassiriÎncă nu există evaluări
- TD2Document4 paginiTD2Oussama Dariàoui100% (1)
- TP Allocation Mémoire FIFO LRUDocument1 paginăTP Allocation Mémoire FIFO LRUmouadh mezÎncă nu există evaluări
- TD1 CorrectionDocument6 paginiTD1 CorrectionHoussem1993100% (1)
- TD 1 Interblocage PDFDocument2 paginiTD 1 Interblocage PDFRahim MenadiÎncă nu există evaluări
- Devoir À RendreDocument2 paginiDevoir À Rendrezakaria zezezzeÎncă nu există evaluări
- SYSTEME D Exploitation QCMDocument8 paginiSYSTEME D Exploitation QCMHamza ToumiÎncă nu există evaluări
- Série 4 - TD - Gestion Memoire - Corrigé1Document3 paginiSérie 4 - TD - Gestion Memoire - Corrigé1HamZa Alaoui100% (2)
- f3 PaginationDocument2 paginif3 PaginationEmma Djomo100% (2)
- Les Systemes A Base de MicroprocesseurDocument8 paginiLes Systemes A Base de Microprocesseura.rharrabÎncă nu există evaluări
- Ccna1 QuestionsDocument51 paginiCcna1 QuestionsLinkinx JbiliÎncă nu există evaluări
- Exercices-Ordonnancement (Partie 1)Document2 paginiExercices-Ordonnancement (Partie 1)Ra NimÎncă nu există evaluări
- TD OrdonnancementDocument4 paginiTD OrdonnancementbenfatahÎncă nu există evaluări
- TD4 Gi1Document3 paginiTD4 Gi1Sourour Kraiem100% (1)
- Efm Installation D'un Poste Informatique Tdi Variante 1 OFPPTDocument1 paginăEfm Installation D'un Poste Informatique Tdi Variante 1 OFPPTaziz100% (1)
- DevoirDocument2 paginiDevoirfatihaÎncă nu există evaluări
- Examen Systemes Exploitation Juin2013Document2 paginiExamen Systemes Exploitation Juin2013Yassine WerghiÎncă nu există evaluări
- ORDONNANCEMMENTDocument16 paginiORDONNANCEMMENTBoris Meva'aÎncă nu există evaluări
- TD5 MémoireDocument2 paginiTD5 Mémoireamine.besrour5214100% (2)
- Gestion de La MémoireDocument11 paginiGestion de La MémoireChaimae Salsabil000% (1)
- SRC1 Reseau td3 PDFDocument4 paginiSRC1 Reseau td3 PDFzakarai chÎncă nu există evaluări
- Gest I On Mémoire Aut 12Document16 paginiGest I On Mémoire Aut 12عائدة مخلوفÎncă nu există evaluări
- TD 3Document4 paginiTD 3Lc ZtÎncă nu există evaluări
- Examen Sys Logique Iit 2014 - CorrigéDocument5 paginiExamen Sys Logique Iit 2014 - CorrigéabderrahmenÎncă nu există evaluări
- Examen OS 2022Document2 paginiExamen OS 2022Molka TouijineÎncă nu există evaluări
- Corrigé Type Examen Module SE1 Univ Tlemcen Promo 2015-2016Document7 paginiCorrigé Type Examen Module SE1 Univ Tlemcen Promo 2015-2016Wich RiverÎncă nu există evaluări
- Exam SE1 2010-2011Document4 paginiExam SE1 2010-2011Khaled AbdessalemÎncă nu există evaluări
- Série de TD 2Document3 paginiSérie de TD 2abdou1994Încă nu există evaluări
- Aller 2 Von Neumann Vs HarvardDocument5 paginiAller 2 Von Neumann Vs HarvardSlimen Mohamed SadokÎncă nu există evaluări
- Corrigé: Base de Données Session de Contrôle 2017Document3 paginiCorrigé: Base de Données Session de Contrôle 2017Sebastien Junior Ngoran100% (1)
- TD 2 Gestion de ProcessusDocument3 paginiTD 2 Gestion de ProcessuschflbÎncă nu există evaluări
- 3 Sujets Concours Dacces Au Doctorat en Informatique ReseauxDocument15 pagini3 Sujets Concours Dacces Au Doctorat en Informatique Reseauxcloud master100% (1)
- Série de TD1Document4 paginiSérie de TD1yanisÎncă nu există evaluări
- 15 Exercices Corrigés en Systèmes D'exploitation Et Architecture Des OrdinateursDocument11 pagini15 Exercices Corrigés en Systèmes D'exploitation Et Architecture Des OrdinateursJean Baptiste SAWADOGOÎncă nu există evaluări
- EFM TRI M05 v1Document1 paginăEFM TRI M05 v1Omar OughzalÎncă nu există evaluări
- Sys Exp-Chapitre2Document8 paginiSys Exp-Chapitre2Oussema ChattiÎncă nu există evaluări
- MAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsDe la EverandMAITRISER Python : De l'Apprentissage aux Projets ProfessionnelsÎncă nu există evaluări
- 3 - Mécanismes de BaseDocument35 pagini3 - Mécanismes de BaseWided TouhamiÎncă nu există evaluări
- Chapitre 3Document11 paginiChapitre 3Tahar GFÎncă nu există evaluări
- Notes de Cours OSDocument11 paginiNotes de Cours OSEsdras DZANGAÎncă nu există evaluări
- TdSemaphore PDFDocument8 paginiTdSemaphore PDFمصعب مصعبÎncă nu există evaluări
- Cours 1Document40 paginiCours 1مصعب مصعبÎncă nu există evaluări
- Mostalahat MathDocument10 paginiMostalahat Mathمصعب مصعبÎncă nu există evaluări
- Correction TD3 PDFDocument10 paginiCorrection TD3 PDFمصعب مصعبÎncă nu există evaluări
- 13 ReseauxDocument9 pagini13 Reseauxمصعب مصعب100% (1)
- TD Cours 1 CorrectionDocument8 paginiTD Cours 1 Correctionمصعب مصعبÎncă nu există evaluări
- Informatique Pour Tous: Tout-En-UnDocument34 paginiInformatique Pour Tous: Tout-En-Unمصعب مصعبÎncă nu există evaluări
- Cours TG PDFDocument98 paginiCours TG PDFمصعب مصعب100% (1)
- Sgbd1 Td4 CorDocument5 paginiSgbd1 Td4 CorhaggarfilsÎncă nu există evaluări
- GF1C2 v2 PDF A4Document78 paginiGF1C2 v2 PDF A4LeïlaÎncă nu există evaluări
- Guide Perfectionnement TiDocument16 paginiGuide Perfectionnement Tijbeli jbeliÎncă nu există evaluări
- 1978 Bollas L'esprit de L'objet Et L'épiphanie Du SacréDocument12 pagini1978 Bollas L'esprit de L'objet Et L'épiphanie Du SacréKevin McInnes100% (1)
- Algeriens BerberesDocument87 paginiAlgeriens BerberesjamilÎncă nu există evaluări
- 31esChampionnatsMonde2011 DossierPresseDocument52 pagini31esChampionnatsMonde2011 DossierPresseCathy MoreauÎncă nu există evaluări
- 9 CLASSE DE Tle C-1Document103 pagini9 CLASSE DE Tle C-1Njiasse MaazouÎncă nu există evaluări
- Le Dictionnaire Electronique Des Mots ComposesDocument15 paginiLe Dictionnaire Electronique Des Mots ComposesQuốc KhánhÎncă nu există evaluări
- Plan de Delimitation: Republique Du CongoDocument1 paginăPlan de Delimitation: Republique Du CongoNeige EKANGUIÎncă nu există evaluări
- Félix Ravaisson - Article Du Dictionnaire Pédagogique de Ferdinand Buisson PDFDocument3 paginiFélix Ravaisson - Article Du Dictionnaire Pédagogique de Ferdinand Buisson PDFCaroline SolievnaÎncă nu există evaluări
- IntroductionDocument4 paginiIntroductionMohammed ChaouqiÎncă nu există evaluări
- Mission Indigo 5e - C01 - Diaporama ActiviteDocument18 paginiMission Indigo 5e - C01 - Diaporama ActiviteHéloïseÎncă nu există evaluări
- Richard Danier - Andre Breton Et L'hermétisme Alchimique 1976Document8 paginiRichard Danier - Andre Breton Et L'hermétisme Alchimique 1976helabzÎncă nu există evaluări
- Energie Eolienne ELIADocument3 paginiEnergie Eolienne ELIAfaridÎncă nu există evaluări
- Chapitre1 (Etudiants)Document79 paginiChapitre1 (Etudiants)ABDELALI SASSIOUIÎncă nu există evaluări
- L'Abyssinie Et Son Apôtre Ou Vie de MGR Justin de Jacobis, Vicaire Apostolique D'abyssinie (Ethiopie)Document469 paginiL'Abyssinie Et Son Apôtre Ou Vie de MGR Justin de Jacobis, Vicaire Apostolique D'abyssinie (Ethiopie)vbeziauÎncă nu există evaluări
- Chnoqiue LA CLASSE #09-FEUILLE DE ROUTE 5°AP - 2019-2020 - VERSION DU 27 JANVIER 2020Document25 paginiChnoqiue LA CLASSE #09-FEUILLE DE ROUTE 5°AP - 2019-2020 - VERSION DU 27 JANVIER 2020Enseignante MahmoudiÎncă nu există evaluări
- Discours Politique Générale Jacques LaliéDocument12 paginiDiscours Politique Générale Jacques LaliéFrançoise Tromeur100% (3)
- Sena, La Nouvelle Terrasse Avec Vue Sur L'île ST Louis Pizzas, Spritzeria, Rooftop Et Pop Up StoreDocument1 paginăSena, La Nouvelle Terrasse Avec Vue Sur L'île ST Louis Pizzas, Spritzeria, Rooftop Et Pop Up Storenina SogeÎncă nu există evaluări
- 1.1.4.6 Lab - Configuring Basic Router Settings With IOS CLI Revisé PDFDocument9 pagini1.1.4.6 Lab - Configuring Basic Router Settings With IOS CLI Revisé PDFEdward DossouÎncă nu există evaluări
- TS807 Page 12Document14 paginiTS807 Page 12Soufyane OuhammiÎncă nu există evaluări
- Sujet Et Corrigé Classes SocialesDocument7 paginiSujet Et Corrigé Classes Socialesmathleboss0Încă nu există evaluări
- Chimie Des Matériaux I 2021Document31 paginiChimie Des Matériaux I 2021Rhm Gaming100% (1)
- Schematique Din 2Document48 paginiSchematique Din 2MecMilo ḆọɤkảÎncă nu există evaluări
- Jésus Christ Le Messager de La Paix Les Signes D'un Retour ImminentDocument304 paginiJésus Christ Le Messager de La Paix Les Signes D'un Retour ImminentAmin-sheikho.comÎncă nu există evaluări
- Autumn Waves Poncho Plus Size Evergreen FRDocument9 paginiAutumn Waves Poncho Plus Size Evergreen FRKlaräÎncă nu există evaluări
- Presentation Specialite SVTDocument13 paginiPresentation Specialite SVTRosh VDMÎncă nu există evaluări
- Les Aigles V3-ArmeesDocument71 paginiLes Aigles V3-Armeeskamenski0% (1)
- 0 INTRODUCTION (Mode de Compatibilité)Document10 pagini0 INTRODUCTION (Mode de Compatibilité)Amira Mira KtnÎncă nu există evaluări
- La Traduction Des Proverbes Du Roumain en FrançaisDocument3 paginiLa Traduction Des Proverbes Du Roumain en FrançaisNicusor CondreaÎncă nu există evaluări
- MKG TerrDocument144 paginiMKG TerrMohammed BahjaÎncă nu există evaluări