S-ar putea să vă placă și
- Operational Amplifier Circuits: Analysis and DesignDe la EverandOperational Amplifier Circuits: Analysis and DesignEvaluare: 4.5 din 5 stele4.5/5 (2)
- Switching in Electrical Transmission and Distribution SystemsDe la EverandSwitching in Electrical Transmission and Distribution SystemsÎncă nu există evaluări
- Frequency Response Lab Manual Mar 2022Document10 paginiFrequency Response Lab Manual Mar 2022Thant Zaw AungÎncă nu există evaluări
- 2142 2 Frequency Response: Semester 5Document9 pagini2142 2 Frequency Response: Semester 5Dwayne JohnsonÎncă nu există evaluări
- Drives and Control Lab ManualDocument36 paginiDrives and Control Lab ManualKabilanÎncă nu există evaluări
- Lab 4 - DC Motor Tachometer: ObjectiveDocument8 paginiLab 4 - DC Motor Tachometer: Objectiveswagato deyÎncă nu există evaluări
- (M2-LAB) Lab Activity 2 - The DC Shunt Generator and MotorDocument10 pagini(M2-LAB) Lab Activity 2 - The DC Shunt Generator and MotorCarlo TabalanzaÎncă nu există evaluări
- Experiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsDocument6 paginiExperiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsdeepakÎncă nu există evaluări
- Final ManualDocument27 paginiFinal ManualKameshSontiÎncă nu există evaluări
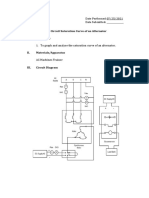
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocument4 paginiOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezÎncă nu există evaluări
- Practical Sessions GuideDocument22 paginiPractical Sessions GuideAnton FerreÎncă nu există evaluări
- (Rev) Lab Activity 3Document6 pagini(Rev) Lab Activity 3MitzOsorioÎncă nu există evaluări
- Electronic Circuit Design: Lab Report: 6Document6 paginiElectronic Circuit Design: Lab Report: 6Faraz Ali ShahÎncă nu există evaluări
- Activity-Lab-2-The DC Shunt Generator and MotorDocument14 paginiActivity-Lab-2-The DC Shunt Generator and MotorDiether PaderoÎncă nu există evaluări
- Activity-Lab-2-The DC Shunt Generator and MotorDocument14 paginiActivity-Lab-2-The DC Shunt Generator and MotorDiether PaderoÎncă nu există evaluări
- Lab 4 - Differentiator & IntegratorDocument14 paginiLab 4 - Differentiator & IntegratorVickneswaran KalerwananÎncă nu există evaluări
- LAB 7 Mian Sayaf Ali ShahDocument5 paginiLAB 7 Mian Sayaf Ali ShahFaraz Ali ShahÎncă nu există evaluări
- Dar Es Salaam Institute of Technology: Department: Module CodeDocument14 paginiDar Es Salaam Institute of Technology: Department: Module CodeSokoine Hamad DenisÎncă nu există evaluări
- Det50063 PW1 Static Converter 1 QuadrantDocument7 paginiDet50063 PW1 Static Converter 1 QuadrantFara FaraÎncă nu există evaluări
- (P1) Modul DC Motor Speed Control SystemDocument13 pagini(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726Încă nu există evaluări
- Laboratory Workbook: NAME: Vishnuvardhan S ROLL NO:19BMC209Document6 paginiLaboratory Workbook: NAME: Vishnuvardhan S ROLL NO:19BMC209VishnuvardhanÎncă nu există evaluări
- Laboratory Workbook: NAME: Vishnuvardhan S ROLL NO:19BMC209Document6 paginiLaboratory Workbook: NAME: Vishnuvardhan S ROLL NO:19BMC209VishnuvardhanÎncă nu există evaluări
- ECE 206L Experiment 6&7: Oscilloscopes LabsDocument16 paginiECE 206L Experiment 6&7: Oscilloscopes Labsapi-437430069Încă nu există evaluări
- Sepic Converter Design and Operation: by Gregory SharpDocument21 paginiSepic Converter Design and Operation: by Gregory SharpSingam SridharÎncă nu există evaluări
- Aditya Lab 12Document19 paginiAditya Lab 12Sujeet PawarÎncă nu există evaluări
- Lab 05 (Servo)Document4 paginiLab 05 (Servo)hitesh89Încă nu există evaluări
- ELEC30x0 Lab8Document6 paginiELEC30x0 Lab8Lûtwàmä JôëÎncă nu există evaluări
- Pe Lab 11-200708Document15 paginiPe Lab 11-200708Omar JanjuaÎncă nu există evaluări
- Operational Amplifier EX.Document9 paginiOperational Amplifier EX.حسن صادق فرج فليحBÎncă nu există evaluări
- Operational AmplifiersDocument53 paginiOperational AmplifiersengrÎncă nu există evaluări
- Experiment 5 - Boost ConverterDocument13 paginiExperiment 5 - Boost ConverterAaaa DdddÎncă nu există evaluări
- (Experiment 7) Operational Amplifier - Basic Op-Amp Circuit (Comparator, Summing, Integrators, and Differentiators) PDFDocument13 pagini(Experiment 7) Operational Amplifier - Basic Op-Amp Circuit (Comparator, Summing, Integrators, and Differentiators) PDFArik JuniarÎncă nu există evaluări
- Lab 10Document8 paginiLab 10A. AlghamdiÎncă nu există evaluări
- DC Motor Speed Control System - ED4400BDocument14 paginiDC Motor Speed Control System - ED4400BDanang Pradika Purnomo100% (1)
- Function GeneratorDocument13 paginiFunction GeneratorDilJalaayÎncă nu există evaluări
- ADE Lab Manual Updated As Per New Syllabus 2018Document33 paginiADE Lab Manual Updated As Per New Syllabus 2018Santosh SanthuÎncă nu există evaluări
- Lab 1 Single Phase Diode RectifiersDocument14 paginiLab 1 Single Phase Diode RectifiersM Hassan BashirÎncă nu există evaluări
- Pre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationDocument11 paginiPre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationtrebeardÎncă nu există evaluări
- Ads Lab 5 - AloyDocument9 paginiAds Lab 5 - AloySilas Sailas EndjalaÎncă nu există evaluări
- Lab Mannual PDFDocument26 paginiLab Mannual PDFssptc Magazine100% (1)
- (M1-LAB) Lab Activity 1 - The DC Series MotorDocument7 pagini(M1-LAB) Lab Activity 1 - The DC Series MotorApéx PredatorÎncă nu există evaluări
- Lab Report CS 5Document6 paginiLab Report CS 5ubaidÎncă nu există evaluări
- Lab 8a &10a - Modeling of DC Motor: EGR 345 Dynamics System Modeling and ControlDocument8 paginiLab 8a &10a - Modeling of DC Motor: EGR 345 Dynamics System Modeling and ControledlerandrewÎncă nu există evaluări
- Power Electronics Lab ManualDocument51 paginiPower Electronics Lab ManualAnand ShankarÎncă nu există evaluări
- Lab3 YeChinDocument10 paginiLab3 YeChinSam LiangÎncă nu există evaluări
- Experiment 03Document8 paginiExperiment 03Zeynal Abidin ŞabaşÎncă nu există evaluări
- Experiment No. 5 The Hartley OscillatorDocument4 paginiExperiment No. 5 The Hartley Oscillatorearl vixenÎncă nu există evaluări
- Ecd Lab Manual Lab 8Document4 paginiEcd Lab Manual Lab 8Food FeedÎncă nu există evaluări
- Experiment3 ForcedOscillation G34 ECE2023Document13 paginiExperiment3 ForcedOscillation G34 ECE2023Trần QuânÎncă nu există evaluări
- ELE2101 Mod 4 - Some Control System HardwareDocument54 paginiELE2101 Mod 4 - Some Control System HardwareRavneet kaurÎncă nu există evaluări
- IIT BH DNC Lab EE Manual Expt 4Document6 paginiIIT BH DNC Lab EE Manual Expt 4Priyesh PandeyÎncă nu există evaluări
- Get Homework/Assignment DoneDocument61 paginiGet Homework/Assignment DoneHadiGunaÎncă nu există evaluări
- EM-1 LabDocument49 paginiEM-1 LabApoorvÎncă nu există evaluări
- Experiments 6 - 10: EC2700 LAB Roll No: 120CH0057 Name: Siddharth Gautam Date of Submission: 19-11-2021Document18 paginiExperiments 6 - 10: EC2700 LAB Roll No: 120CH0057 Name: Siddharth Gautam Date of Submission: 19-11-2021S GÎncă nu există evaluări
- Rajshahi University of Engineering &technologyDocument4 paginiRajshahi University of Engineering &technologyদিব্যজয় পালÎncă nu există evaluări
- LABreportcommsDocument5 paginiLABreportcommsNoriel MendozaÎncă nu există evaluări
- Common Emitter AmplifierDocument3 paginiCommon Emitter AmplifierDaniel Tamisen100% (1)
- Electric Circuit ManualDocument140 paginiElectric Circuit ManualMd abdul karimÎncă nu există evaluări
- Lab 3: Control System Design: Part 1: Introduction and ObjectivesDocument13 paginiLab 3: Control System Design: Part 1: Introduction and Objectivesvince kafuaÎncă nu există evaluări
- TPS7A4700EVM-094 Evaluation Module: User's GuideDocument14 paginiTPS7A4700EVM-094 Evaluation Module: User's GuideJaroslav BiresÎncă nu există evaluări
- Design of A Microwave Amplifier For Wireless ApplicationDocument8 paginiDesign of A Microwave Amplifier For Wireless ApplicationtaulantzeÎncă nu există evaluări
- Analog Devices Technical Books ListDocument39 paginiAnalog Devices Technical Books Listravi010582Încă nu există evaluări
- CarciaDocument11 paginiCarcia4z4rbÎncă nu există evaluări
- Alpine 3527VDocument2 paginiAlpine 3527VJoshua Wood0% (4)
- Science Workshop 750 Interface: Instruction Sheet For The PASCO Model CI-7500Document6 paginiScience Workshop 750 Interface: Instruction Sheet For The PASCO Model CI-7500Tariq AzizÎncă nu există evaluări
- Datasheet PDFDocument4 paginiDatasheet PDFJose Luis Guanchez CarrilloÎncă nu există evaluări
- JAMMERsDocument60 paginiJAMMERsrahul kumar100% (8)
- Fender Vibro King ManualDocument9 paginiFender Vibro King ManualOcta DosÎncă nu există evaluări
- AD706JNDocument12 paginiAD706JNapi-3825669Încă nu există evaluări
- UltraPRO Manual 7.5.0Document199 paginiUltraPRO Manual 7.5.0Francisco Ivan Silva TapiaÎncă nu există evaluări
- Rk-Mcu HN-PTT - Master Control Unit Rk-McuDocument1 paginăRk-Mcu HN-PTT - Master Control Unit Rk-McuCiprian BolovanÎncă nu există evaluări
- M15 Manual DETECTORDocument44 paginiM15 Manual DETECTORsamel abreÎncă nu există evaluări
- Data Sheet: TDA1515BQDocument11 paginiData Sheet: TDA1515BQmeteorix0Încă nu există evaluări
- Altec - Catalog 1964Document14 paginiAltec - Catalog 1964Marco Dei Bi AivÎncă nu există evaluări
- FCARC Chapter 4Document11 paginiFCARC Chapter 4Kean Xyrem TialengkoÎncă nu există evaluări
- GM360 Service Maual VHF Info A4Document34 paginiGM360 Service Maual VHF Info A4Christine PatrickÎncă nu există evaluări
- 3 A Step-Down Switching Regulator: ApplicationsDocument47 pagini3 A Step-Down Switching Regulator: ApplicationsPedro100% (1)
- 2nd Semester Courses and OutlinesDocument4 pagini2nd Semester Courses and OutlinesJohnÎncă nu există evaluări
- 17ec332 PDFDocument4 pagini17ec332 PDFShashi SagarÎncă nu există evaluări
- ElexfinalsDocument76 paginiElexfinalsjjeongdongieeÎncă nu există evaluări
- Obsolete Product(s) - Obsolete Product(s) : 4 X 47W MOSFET Quad Bridge Power AmplifierDocument12 paginiObsolete Product(s) - Obsolete Product(s) : 4 X 47W MOSFET Quad Bridge Power AmplifiermicaelfnÎncă nu există evaluări
- Fluke 10 11 12 SMDocument51 paginiFluke 10 11 12 SMMaurilio Caetano100% (1)
- + - 12V Dual Power Supply Using 7812, 7912Document9 pagini+ - 12V Dual Power Supply Using 7812, 7912lukeeskoÎncă nu există evaluări
- Diagrama Bloques STR-De245Document1 paginăDiagrama Bloques STR-De245Omar ArceÎncă nu există evaluări
- Project Report: Department of CSEDocument6 paginiProject Report: Department of CSELabibÎncă nu există evaluări
- Semiconductor 200Document29 paginiSemiconductor 200Vikash PalÎncă nu există evaluări
- TDA7851A: 4 X 48 W MOSFET Quad Bridge Power AmplifierDocument15 paginiTDA7851A: 4 X 48 W MOSFET Quad Bridge Power AmplifierADAM DAGLISÎncă nu există evaluări
- Physics M.SC PDFDocument81 paginiPhysics M.SC PDFDinesh KatochÎncă nu există evaluări
- GSM Bts 18000 OutdoorDocument36 paginiGSM Bts 18000 Outdoorsatya_33Încă nu există evaluări
- 12 Volt To 230 Volt Inverter Circuit Diagram Using IC 555Document26 pagini12 Volt To 230 Volt Inverter Circuit Diagram Using IC 555Mohit Jatav0% (1)