S-ar putea să vă placă și
- Equalization MotionDocument10 paginiEqualization MotionMahmud JaafarÎncă nu există evaluări
- BLAST System: Different Decoders With Different Antennas: Pargat Singh Sidhu, Amit Grover, Neeti GroverDocument6 paginiBLAST System: Different Decoders With Different Antennas: Pargat Singh Sidhu, Amit Grover, Neeti GroverIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalÎncă nu există evaluări
- Performance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversDocument5 paginiPerformance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversNetsanet JemalÎncă nu există evaluări
- Chapter-1: 1.1. Wireless Communication SystemsDocument28 paginiChapter-1: 1.1. Wireless Communication Systemskarthick_mariner92Încă nu există evaluări
- On The Performance of The MIMO Zero-Forcing Receiver in The Presence of Channel Estimation ErrorDocument6 paginiOn The Performance of The MIMO Zero-Forcing Receiver in The Presence of Channel Estimation ErrorPawanKumar BarnwalÎncă nu există evaluări
- A Comparative Analysis of LS and MMSE Channel Estimation Techniques For MIMO-OFDM SystemDocument6 paginiA Comparative Analysis of LS and MMSE Channel Estimation Techniques For MIMO-OFDM SystempreetiÎncă nu există evaluări
- Performance Analysis of V-Blast Based MIMO-OFDM System With Various Detection TechniquesDocument4 paginiPerformance Analysis of V-Blast Based MIMO-OFDM System With Various Detection Techniqueszizo1921Încă nu există evaluări
- Maximum Ratio Transmission: Titus K. Y. LoDocument4 paginiMaximum Ratio Transmission: Titus K. Y. LoButtordÎncă nu există evaluări
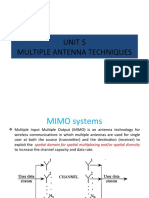
- MIMO FundamentalsDocument34 paginiMIMO FundamentalsAshwani KumarÎncă nu există evaluări
- DC 5 Receiver NewDocument228 paginiDC 5 Receiver NewersimohitÎncă nu există evaluări
- Performance of Diversity Combining Techniques For Antenna ArraysDocument4 paginiPerformance of Diversity Combining Techniques For Antenna ArraysTushar SaxenaÎncă nu există evaluări
- Assignment Rough WorkDocument7 paginiAssignment Rough Workmunna_mantra896919Încă nu există evaluări
- Channel Estimation EJSR 70-1-04Document8 paginiChannel Estimation EJSR 70-1-04حاتم الشرڭيÎncă nu există evaluări
- CSPII Lab InstructionsDocument8 paginiCSPII Lab InstructionsSadiqur Rahaman SumonÎncă nu există evaluări
- Improved Adaptive Bit Error Rate Performance For Fading Channel CommunicationDocument10 paginiImproved Adaptive Bit Error Rate Performance For Fading Channel CommunicationInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- BER For BPSK in OFDM With Rayleigh Multipath ChannelDocument6 paginiBER For BPSK in OFDM With Rayleigh Multipath ChannelNaveen Kumar ChadalavadaÎncă nu există evaluări
- HST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingDocument25 paginiHST.582J / 6.555J / 16.456J Biomedical Signal and Image ProcessingSrinivas SaiÎncă nu există evaluări
- MIMO Channel Estimation Using The LS and MMSE Algorithm: Mohammed Ali Mohammed MOQBEL, Wangdong, Al-Marhabi Zaid AliDocument10 paginiMIMO Channel Estimation Using The LS and MMSE Algorithm: Mohammed Ali Mohammed MOQBEL, Wangdong, Al-Marhabi Zaid AliKoustab MaityÎncă nu există evaluări
- A Low Complexity Channel Estimation Algorithm For Massive MIMO SystemDocument12 paginiA Low Complexity Channel Estimation Algorithm For Massive MIMO SystemilbahiÎncă nu există evaluări
- Eigen Value Based (EBB) Beamforming Precoding Design For Downlink Capacity Improvement in Multiuser MIMO ChannelDocument7 paginiEigen Value Based (EBB) Beamforming Precoding Design For Downlink Capacity Improvement in Multiuser MIMO ChannelKrishna Ram BudhathokiÎncă nu există evaluări
- Joint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmDocument8 paginiJoint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- CH 5Document43 paginiCH 5ubyisismayilÎncă nu există evaluări
- What A Blast!: Dominik Zankl, Stefan Schuster, Reinhard Feger, and Andreas StelzerDocument18 paginiWhat A Blast!: Dominik Zankl, Stefan Schuster, Reinhard Feger, and Andreas Stelzerrahul kumarÎncă nu există evaluări
- Fading SimulationDocument45 paginiFading SimulationAtef Al-Kotafi Al-AbdiÎncă nu există evaluări
- Development of Channel Estimation Methods and OptimizationDocument6 paginiDevelopment of Channel Estimation Methods and OptimizationInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- 1 Synchronization and Frequency Estimation Errors: 1.1 Doppler EffectsDocument15 pagini1 Synchronization and Frequency Estimation Errors: 1.1 Doppler EffectsRajib MukherjeeÎncă nu există evaluări
- Performance of Channel Estimation in OFDM System For Different PSK ModulationsDocument6 paginiPerformance of Channel Estimation in OFDM System For Different PSK ModulationsliiÎncă nu există evaluări
- Least Bit Error Rate Adaptive Nonlinear Equalisers For: Binary SignallingDocument8 paginiLeast Bit Error Rate Adaptive Nonlinear Equalisers For: Binary SignallingVivek RoyÎncă nu există evaluări
- 6 1Document6 pagini6 1javicho2006Încă nu există evaluări
- Biomedical Signal FilteringDocument58 paginiBiomedical Signal FilteringMounirHanineÎncă nu există evaluări
- Print Fading ChannelDocument18 paginiPrint Fading ChannelRishabh TewariÎncă nu există evaluări
- Channel Estimation ModelingDocument15 paginiChannel Estimation ModelingJohn TranÎncă nu există evaluări
- Orthogonal Frequency Division Multiplexing (OFDM)Document32 paginiOrthogonal Frequency Division Multiplexing (OFDM)jagadeesh jagadeÎncă nu există evaluări
- Computer Networks UNIT-2 Syllabus: Physical Layer - Fourier Analysis - Bandwidth Limited Signals - The MaximumDocument39 paginiComputer Networks UNIT-2 Syllabus: Physical Layer - Fourier Analysis - Bandwidth Limited Signals - The MaximumRaju ImandiÎncă nu există evaluări
- EEM496 Communication Systems Laboratory - Report6 - Probability of Error For Mary PSK, Qam and Scatter PlotsDocument18 paginiEEM496 Communication Systems Laboratory - Report6 - Probability of Error For Mary PSK, Qam and Scatter Plotsdonatello84Încă nu există evaluări
- Researchpaper OFDM Modulator For Wireless LAN WLAN StandardDocument5 paginiResearchpaper OFDM Modulator For Wireless LAN WLAN Standardtsk4b7Încă nu există evaluări
- Matlab Toolbox QuickrefDocument11 paginiMatlab Toolbox QuickrefshervinshÎncă nu există evaluări
- A Conceptual Study of OFDM-based Multiple Access SchemesDocument7 paginiA Conceptual Study of OFDM-based Multiple Access SchemeswoodksdÎncă nu există evaluări
- Matlab Exercises To Explain Discrete Fourier Transforms PDFDocument9 paginiMatlab Exercises To Explain Discrete Fourier Transforms PDFsenthil kumarÎncă nu există evaluări
- 03 SoftwareDocument4 pagini03 SoftwareKamal Cruz LeÎncă nu există evaluări
- EE4601 Communication Systems: Week 13 Linear Zero Forcing EqualizationDocument14 paginiEE4601 Communication Systems: Week 13 Linear Zero Forcing Equalizationamjc16Încă nu există evaluări
- Unit 5Document47 paginiUnit 5menakadevieceÎncă nu există evaluări
- Multiplexing - Theory and ConceptDocument6 paginiMultiplexing - Theory and ConceptsolayanoÎncă nu există evaluări
- A Novel Linear MMSE Detection Technique For MC-CDMADocument4 paginiA Novel Linear MMSE Detection Technique For MC-CDMANitin Suyan PanchalÎncă nu există evaluări
- Probability AssignmentDocument10 paginiProbability Assignmentrabya waheedÎncă nu există evaluări
- Robust ML Detection Algorithm For Mimo Receivers in Presence of Channel Estimation ErrorDocument5 paginiRobust ML Detection Algorithm For Mimo Receivers in Presence of Channel Estimation ErrortrÎncă nu există evaluări
- Eye Diagram With Raised Cosine FilteringDocument7 paginiEye Diagram With Raised Cosine Filteringpanga_radhakrishnaÎncă nu există evaluări
- MATLAB Lab Project - Mtech IIsemDocument61 paginiMATLAB Lab Project - Mtech IIsemSatya NarayanaÎncă nu există evaluări
- CM Kaltfl 080709Document5 paginiCM Kaltfl 080709Võ Quy QuangÎncă nu există evaluări
- E 5 EqDocument56 paginiE 5 EqMehwish AliÎncă nu există evaluări
- EstimationDocument6 paginiEstimationAthulya ManniledamÎncă nu există evaluări
- A Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnDocument16 paginiA Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnLe-Nam TranÎncă nu există evaluări
- 08.508 DSP Lab Expt No 6 HandoutDocument7 pagini08.508 DSP Lab Expt No 6 HandoutAssini HussainÎncă nu există evaluări
- Simulation of Wireless Communication Systems Using MATLABDocument57 paginiSimulation of Wireless Communication Systems Using MATLABcuong260388Încă nu există evaluări
- Geneti Algorithm Optimization Tool For Channel Estimation and Symbol Detection in Mimo-OFDM SystemsDocument10 paginiGeneti Algorithm Optimization Tool For Channel Estimation and Symbol Detection in Mimo-OFDM SystemsjdnfjngsÎncă nu există evaluări
- Chapter 12 - Modulation and Demodulation Techniques For Wireless Communication SystemsDocument21 paginiChapter 12 - Modulation and Demodulation Techniques For Wireless Communication SystemsproteccionesÎncă nu există evaluări
- Wbn2007 Wireless ChannelDocument103 paginiWbn2007 Wireless ChannelpapifunkeroÎncă nu există evaluări
- Noise in MIMODocument8 paginiNoise in MIMOherontÎncă nu există evaluări
- Common Phase DUE To Phase Noise in Ofdm Estimation and SuppressionDocument5 paginiCommon Phase DUE To Phase Noise in Ofdm Estimation and SuppressionBrudedo FuystolÎncă nu există evaluări
- 3 Conf 2009 Icccp9Document4 pagini3 Conf 2009 Icccp9ZahirÎncă nu există evaluări
- 4 I&m Roadshow Otn v1.2Document47 pagini4 I&m Roadshow Otn v1.2vairaveleceÎncă nu există evaluări
- On Student Support System: Roject EportDocument20 paginiOn Student Support System: Roject EportarunÎncă nu există evaluări
- Drones 06 00147Document27 paginiDrones 06 00147Prescoe LungreeÎncă nu există evaluări
- Stephen Morse, Nora McNamara (Auth.) - Sustainable Livelihood Approach - A Critique of Theory and Practice-Springer Netherlands (2013)Document201 paginiStephen Morse, Nora McNamara (Auth.) - Sustainable Livelihood Approach - A Critique of Theory and Practice-Springer Netherlands (2013)Jonatán Edward Rojas PoloÎncă nu există evaluări
- Performance Task 2 Practical ResearchDocument5 paginiPerformance Task 2 Practical Researchmaeca mae gloriosoÎncă nu există evaluări
- Pediatric Surgery Handbook For Residents and Medical Students (2017)Document428 paginiPediatric Surgery Handbook For Residents and Medical Students (2017)Oana Stefania Pintilii100% (1)
- University of Caloocan City Graduate School: Appendix A Survey QuestionnaireDocument12 paginiUniversity of Caloocan City Graduate School: Appendix A Survey QuestionnaireJullene TunguiaÎncă nu există evaluări
- ReadMe WinDocument4 paginiReadMe WinpundaiÎncă nu există evaluări
- Spin Off 2017 NASADocument238 paginiSpin Off 2017 NASASV HegdeÎncă nu există evaluări
- EDU30001 Imagining The World Through Language and Literature Assignment 2B Folio Part 2 Copy Copy - DoDocument11 paginiEDU30001 Imagining The World Through Language and Literature Assignment 2B Folio Part 2 Copy Copy - Donaima fadilyyt7i8 please 0tlÎncă nu există evaluări
- 2 Rajiv Aggarwal Bio CNG A Green Alternate To Fossil FuelsDocument28 pagini2 Rajiv Aggarwal Bio CNG A Green Alternate To Fossil FuelsGaneshkumar AmbedkarÎncă nu există evaluări
- Simple Note On Medical ApproachDocument7 paginiSimple Note On Medical ApproachSyaidatul NadwaÎncă nu există evaluări
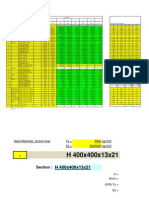
- Steel Column - Beams CalcDocument21 paginiSteel Column - Beams CalctmssorinÎncă nu există evaluări
- AMADA Vipros 357 Queen With Fanuc 18P Control Layout Drawings ManualDocument10 paginiAMADA Vipros 357 Queen With Fanuc 18P Control Layout Drawings ManualSv KoÎncă nu există evaluări
- ENG2000 Chapter 2 Atoms and Bonding: ENG2000: R.I. Hornsey Atom: 1Document29 paginiENG2000 Chapter 2 Atoms and Bonding: ENG2000: R.I. Hornsey Atom: 1Manuel Tutacha ™Încă nu există evaluări
- 2016 MVP Tcode Key GuideDocument149 pagini2016 MVP Tcode Key GuideEnrique GomezÎncă nu există evaluări
- Lubrication BasicsDocument3 paginiLubrication BasicsVenkatesh RjÎncă nu există evaluări
- 2 I SEP ?n?i: Memorandum CircutarDocument10 pagini2 I SEP ?n?i: Memorandum CircutarMPD Forensic UnitÎncă nu există evaluări
- TM 10-4610-309-23PDocument500 paginiTM 10-4610-309-23Pjljackson2000Încă nu există evaluări
- Telephone DirectoryDocument4 paginiTelephone DirectoryDhaniya Karthik33% (3)
- Geography: (Mains) Question Paper 1988 Paper - IDocument3 paginiGeography: (Mains) Question Paper 1988 Paper - INakka JaswanthÎncă nu există evaluări
- Corporate Governance and EthicsDocument24 paginiCorporate Governance and EthicsUdit KÎncă nu există evaluări
- Lecture HW 5 ProbText Moran2003 Chp11 FluidStaticsDocument2 paginiLecture HW 5 ProbText Moran2003 Chp11 FluidStaticsPanawit HanpinitsakÎncă nu există evaluări
- 1VuHongDuyen - Portfolio 5Document7 pagini1VuHongDuyen - Portfolio 5manhtuan15aÎncă nu există evaluări
- 5990 8296enDocument4 pagini5990 8296enGiriraj T KulkarniÎncă nu există evaluări
- Pharmacology I Lab ManualDocument49 paginiPharmacology I Lab ManualNilanjan GuptaÎncă nu există evaluări
- Fib Congress Freyssinet by ShushkewichDocument28 paginiFib Congress Freyssinet by ShushkewichpablokrahlÎncă nu există evaluări
- CMT Electronic Heated ViscometerDocument1 paginăCMT Electronic Heated ViscometerIBRAHIM ALMANLAÎncă nu există evaluări
- Mental Health Scope and SequenceDocument2 paginiMental Health Scope and Sequenceapi-250571783Încă nu există evaluări
- EPR Paradox ContestedDocument6 paginiEPR Paradox ContestedAlfonso FlórezÎncă nu există evaluări