S-ar putea să vă placă și
- Reset ETSDocument29 paginiReset ETSAlejandro BurgosÎncă nu există evaluări
- Instant Assessments for Data Tracking, Grade 5: MathDe la EverandInstant Assessments for Data Tracking, Grade 5: MathÎncă nu există evaluări
- Heli 2000-3500Document6 paginiHeli 2000-3500Hector Emiliano GarciaÎncă nu există evaluări
- Land Use Transportation: School of Planning and Public Policy, CEPT University, AhmedabadDocument41 paginiLand Use Transportation: School of Planning and Public Policy, CEPT University, AhmedabadSaurabh SumanÎncă nu există evaluări
- Customer Journey Map - Uber Customer PDFDocument1 paginăCustomer Journey Map - Uber Customer PDFLidia Echeverria de FrutosÎncă nu există evaluări
- 2000 Cessna 206H Checklist v1Document7 pagini2000 Cessna 206H Checklist v1Kevin ArteagaÎncă nu există evaluări
- Delta Airlines ReservationsDocument2 paginiDelta Airlines ReservationsAirlines MapÎncă nu există evaluări
- General Motors IndiaDocument21 paginiGeneral Motors Indiach2802100% (2)
- Stacky // Kleos // TMT / TMM // CI //: Truck Mounted Forklift Order PickerDocument2 paginiStacky // Kleos // TMT / TMM // CI //: Truck Mounted Forklift Order Pickercharlos manikÎncă nu există evaluări
- Suzuki Swift 1990Document16 paginiSuzuki Swift 1990Muhammad Azam100% (1)
- 1 ITB For Scour Protection at SLTS PROJECTDocument13 pagini1 ITB For Scour Protection at SLTS PROJECTEng Muhammad Afzal AlmaniÎncă nu există evaluări
- High Speed Railway Track Technical Options Suitability Assessment GuideDocument90 paginiHigh Speed Railway Track Technical Options Suitability Assessment GuidelachguerÎncă nu există evaluări
- HW4 - Shfrytezimi NentokesorDocument2 paginiHW4 - Shfrytezimi NentokesorGzim IbishiÎncă nu există evaluări
- Tramo Ii: Vía Ambuqui - Aloburo Km. 6+500 - Km. 7+000: Gobierno Autonomo Descentralizado de La Provincia ImbaburaDocument1 paginăTramo Ii: Vía Ambuqui - Aloburo Km. 6+500 - Km. 7+000: Gobierno Autonomo Descentralizado de La Provincia ImbaburaKenny QuiritaÎncă nu există evaluări
- Multilevel Six-Phase Machine Drive System Composed of Three-Level and Two-Level InvertersDocument5 paginiMultilevel Six-Phase Machine Drive System Composed of Three-Level and Two-Level InvertersPhelipe LealÎncă nu există evaluări
- Corrigendum - 1 - AGCC - 02 (26.08.2021)Document8 paginiCorrigendum - 1 - AGCC - 02 (26.08.2021)debapriyoÎncă nu există evaluări
- TNDocument1 paginăTNpravinsathiaÎncă nu există evaluări
- NEWFLEX - Ban Ve Dau Noi Ha Tang - 230829Document12 paginiNEWFLEX - Ban Ve Dau Noi Ha Tang - 230829ha ducÎncă nu există evaluări
- LMCPL-P2023-02-COS-43 - Working Platform - Service Rack Zone 2Document8 paginiLMCPL-P2023-02-COS-43 - Working Platform - Service Rack Zone 2Ali md YounusÎncă nu există evaluări
- 2019 07 01 Mbta System Map Full PDFDocument3 pagini2019 07 01 Mbta System Map Full PDFdodoÎncă nu există evaluări
- MTR HongkongDocument2 paginiMTR HongkongLusiana MÎncă nu există evaluări
- Hat Omega SectionsDocument2 paginiHat Omega SectionsCostica MerfeaÎncă nu există evaluări
- Bihar Geography GS in Hindi PDF by ParamountDocument13 paginiBihar Geography GS in Hindi PDF by ParamountRajib BanerjeeÎncă nu există evaluări
- Andres Carne de Res: Urbanizacion VivenzaDocument1 paginăAndres Carne de Res: Urbanizacion VivenzaBODEGA CONSTRUGAS GONZALEZ GC SASÎncă nu există evaluări
- Openfoam Simulation of The Flow in The Hoelleforsen Draft Tube ModelDocument15 paginiOpenfoam Simulation of The Flow in The Hoelleforsen Draft Tube ModelAghajaniÎncă nu există evaluări
- Anexo Viii: "Estudio Hidrogeológico Del Acuífero IcaDocument12 paginiAnexo Viii: "Estudio Hidrogeológico Del Acuífero IcaJhxncxrlx MxzxÎncă nu există evaluări
- Pipe GradientsDocument7 paginiPipe GradientsSajit MenonÎncă nu există evaluări
- 6-Persons LiftDocument10 pagini6-Persons LiftKhaled GameaÎncă nu există evaluări
- Slides 10Document33 paginiSlides 10aaroncete14Încă nu există evaluări
- Final Ad Case Studies Commercial Complex1Document30 paginiFinal Ad Case Studies Commercial Complex1Deepali Pisolkar HejibÎncă nu există evaluări
- A - SPEC SHEET LANDA LX.2 PUMPS 7qig41Document2 paginiA - SPEC SHEET LANDA LX.2 PUMPS 7qig41ravenhotrods64Încă nu există evaluări
- 2023 06 30 System MapDocument3 pagini2023 06 30 System MapNathanÎncă nu există evaluări
- DSP MathematicsDocument62 paginiDSP Mathematicshameedkhan97Încă nu există evaluări
- Sony 1-474-218-11 Delta Aps-272 Psu PDFDocument3 paginiSony 1-474-218-11 Delta Aps-272 Psu PDFRathod GunvantrayÎncă nu există evaluări
- Grove AT422 - 22 TonDocument4 paginiGrove AT422 - 22 TonMamour brshimÎncă nu există evaluări
- Downtown Dubai Opera District: Typical Services Reservation Cross Section For Corridor Width of 30.50MDocument1 paginăDowntown Dubai Opera District: Typical Services Reservation Cross Section For Corridor Width of 30.50Mabdullah sahibÎncă nu există evaluări
- Tracing PDFDocument1 paginăTracing PDFEdmund Earl TimothyÎncă nu există evaluări
- Mc616ste 20Document2 paginiMc616ste 20ahmed ktebahÎncă nu există evaluări
- MSD23-2 - Aula 12 - Elementos Elétricos e EletromecânicosDocument68 paginiMSD23-2 - Aula 12 - Elementos Elétricos e EletromecânicosRaylane MenezesÎncă nu există evaluări
- Traffic Assignment Algorithm ComparisonDocument36 paginiTraffic Assignment Algorithm ComparisonSiervo Andrés Aguirre BenavidesÎncă nu există evaluări
- Escalumex Catalogo 2020Document20 paginiEscalumex Catalogo 2020Zhinar GallegosÎncă nu există evaluări
- GF GCOT B 14 4002 - 1 SignedDocument2 paginiGF GCOT B 14 4002 - 1 SignedYuan DiÎncă nu există evaluări
- Leyenda: Recorrido Línea de ConducciónDocument1 paginăLeyenda: Recorrido Línea de ConducciónEdwinACHÎncă nu există evaluări
- 3 - Origin & Destination - PassenegerDocument1 pagină3 - Origin & Destination - PassenegerhariÎncă nu există evaluări
- Master Plan': B E Y R O U T HDocument1 paginăMaster Plan': B E Y R O U T HYADNYAYEE PAWARÎncă nu există evaluări
- Sidi Farag Farm Road-DUCT BUNK DETAIL-26Nov23-000Document5 paginiSidi Farag Farm Road-DUCT BUNK DETAIL-26Nov23-000Limar SetstraÎncă nu există evaluări
- Navi Mumbai International Airport Site Plan: SCALE - 1:10,000 All Dimensions in Meters Sheet Size - A1Document1 paginăNavi Mumbai International Airport Site Plan: SCALE - 1:10,000 All Dimensions in Meters Sheet Size - A1Meenakshi RajÎncă nu există evaluări
- Lecture Notes 10: Fading Channels ModelsDocument19 paginiLecture Notes 10: Fading Channels ModelsayushÎncă nu există evaluări
- Precision Approach Terrain Chart - Icao BRUSSELS / Brussels-National (EBBR) Rwy 25RDocument1 paginăPrecision Approach Terrain Chart - Icao BRUSSELS / Brussels-National (EBBR) Rwy 25Rtom wauteletÎncă nu există evaluări
- London Hop On Hop Off MapDocument6 paginiLondon Hop On Hop Off MapNunoÎncă nu există evaluări
- London Hop On Hop Off MapDocument6 paginiLondon Hop On Hop Off MapClaraÎncă nu există evaluări
- Department of Transport Planning: Studio Exercise, Jan-May, 2019Document3 paginiDepartment of Transport Planning: Studio Exercise, Jan-May, 2019hariÎncă nu există evaluări
- Section Elevation: Shard PlaceDocument1 paginăSection Elevation: Shard PlacefereetÎncă nu există evaluări
- San Mateo Disadeco Building Architectural Plans A5Document1 paginăSan Mateo Disadeco Building Architectural Plans A5AYSON N. DELA CRUZÎncă nu există evaluări
- Isb SDP With SRMDocument1 paginăIsb SDP With SRMErwin DudasÎncă nu există evaluări
- Downtown Dubai Opera District: Typical Services Reservation Cross Section For Corridor Width of 30.50MDocument1 paginăDowntown Dubai Opera District: Typical Services Reservation Cross Section For Corridor Width of 30.50Mabdullah sahibÎncă nu există evaluări
- Architectural Tender Drawing: Construction DrawingsDocument1 paginăArchitectural Tender Drawing: Construction Drawingsme kwc36Încă nu există evaluări
- LGS History POSter EnglisDocument1 paginăLGS History POSter EnglisluigidigioÎncă nu există evaluări
- Prepone AreaDocument1 paginăPrepone Areasumit pandeyÎncă nu există evaluări
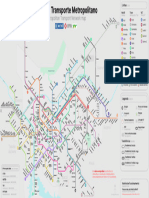
- Mapa Do Transporte Metropolitano FuturoDocument1 paginăMapa Do Transporte Metropolitano FuturonicolassadboysÎncă nu există evaluări
- Downtown Dubai Opera District: Typical Services Reservation Cross Section For Corridor Width of 30.50MDocument1 paginăDowntown Dubai Opera District: Typical Services Reservation Cross Section For Corridor Width of 30.50Mabdullah sahibÎncă nu există evaluări
- Aco Drain OverviewDocument2 paginiAco Drain Overviews11174444Încă nu există evaluări
- Ref.06 - OS00002 - E - BW31.ZA3.UM01&EZ18021 - EN - R0Document1 paginăRef.06 - OS00002 - E - BW31.ZA3.UM01&EZ18021 - EN - R0IliyanPetrovÎncă nu există evaluări
- Mep Layout 1Document1 paginăMep Layout 1RajeshÎncă nu există evaluări
- Center For Sports Nettakalpa Motors Sri Krishna Condiments Venkateswara Sri LakshmiDocument1 paginăCenter For Sports Nettakalpa Motors Sri Krishna Condiments Venkateswara Sri LakshmiNagamani ManiÎncă nu există evaluări
- Module7 QgansDocument13 paginiModule7 Qgansdr.hassanalqanaziÎncă nu există evaluări
- White Shade: The Real-World Primer for the Black Professional WomanDe la EverandWhite Shade: The Real-World Primer for the Black Professional WomanÎncă nu există evaluări
- Mrno: Name: 003174940 Afzal Section No: Mic190480387 Gender: Male / 27 Year (S) Referred By: DR Ghaffar Labno: 01810641 Microbiology Sample Date: 01-Oct-19Document1 paginăMrno: Name: 003174940 Afzal Section No: Mic190480387 Gender: Male / 27 Year (S) Referred By: DR Ghaffar Labno: 01810641 Microbiology Sample Date: 01-Oct-19Eng Muhammad Afzal AlmaniÎncă nu există evaluări
- Experience Letter FormatDocument1 paginăExperience Letter FormatEng Muhammad Afzal AlmaniÎncă nu există evaluări
- 53 Aa 9 Dcad 1 DceDocument3 pagini53 Aa 9 Dcad 1 DceEng Muhammad Afzal AlmaniÎncă nu există evaluări
- TransferDocument1 paginăTransferEng Muhammad Afzal AlmaniÎncă nu există evaluări
- Airport Planning and OperationDocument12 paginiAirport Planning and OperationEng Muhammad Afzal AlmaniÎncă nu există evaluări
- 1001 Math Problems 2ndDocument2 pagini1001 Math Problems 2ndEng Muhammad Afzal AlmaniÎncă nu există evaluări
- Research Report of Final Presenation Shams U ZamanDocument7 paginiResearch Report of Final Presenation Shams U ZamanEng Muhammad Afzal AlmaniÎncă nu există evaluări
- You Need To Take These ARN Numbers To The Visa/mastercard Department, Only They Can Remove Your Funds From The Holding Account and Credit It To Your Bank AccountDocument4 paginiYou Need To Take These ARN Numbers To The Visa/mastercard Department, Only They Can Remove Your Funds From The Holding Account and Credit It To Your Bank AccountEng Muhammad Afzal AlmaniÎncă nu există evaluări
- Research Report of Final PresentationDocument14 paginiResearch Report of Final PresentationEng Muhammad Afzal AlmaniÎncă nu există evaluări
- GENERALDocument9 paginiGENERALshaik mahaboobÎncă nu există evaluări
- Side Impact Sensor 8212 C Pillar Removal and InstallationDocument2 paginiSide Impact Sensor 8212 C Pillar Removal and InstallationMichael HernandezÎncă nu există evaluări
- Short Course Training Program PDFDocument23 paginiShort Course Training Program PDFApick MuhdÎncă nu există evaluări
- Project Report On Maruti Suzuki SwiftDocument25 paginiProject Report On Maruti Suzuki SwiftAtul Chauhan100% (1)
- HondaDocument55 paginiHondaNisha GehlotÎncă nu există evaluări
- BTK 4875/01 DEC/CGK-DPS: - Not For Real World NavigationDocument37 paginiBTK 4875/01 DEC/CGK-DPS: - Not For Real World Navigationermy trawanÎncă nu există evaluări
- Royal Enfield Meteor 350 Technical SpecificationsDocument17 paginiRoyal Enfield Meteor 350 Technical SpecificationsThennarasan GÎncă nu există evaluări
- BMW Vs MercDocument27 paginiBMW Vs MercRida KhalidÎncă nu există evaluări
- Ekran Resmi 2024-02-29 - 20.12.30Document46 paginiEkran Resmi 2024-02-29 - 20.12.308qpk4zg7ryÎncă nu există evaluări
- GSK 004/04 NOV/MDE-CLO: - Not For Real World NavigationDocument24 paginiGSK 004/04 NOV/MDE-CLO: - Not For Real World NavigationJose Daniel ArangoÎncă nu există evaluări
- Technical Memorandum: California High-Speed Train ProjectDocument43 paginiTechnical Memorandum: California High-Speed Train Project최광민Încă nu există evaluări
- A Technical Seminar REPORTDocument8 paginiA Technical Seminar REPORTVijay VinniÎncă nu există evaluări
- Tran Studyelectrical 2012ADocument221 paginiTran Studyelectrical 2012ARamesh AnanthanarayananÎncă nu există evaluări
- Atomy For You Mastership Goals Setting TemplateDocument1 paginăAtomy For You Mastership Goals Setting TemplateTay ChittuÎncă nu există evaluări
- Catalogo Tokico 2012Document316 paginiCatalogo Tokico 2012Андрей СилаевÎncă nu există evaluări
- Alert Service Bulletin: EmergencyDocument12 paginiAlert Service Bulletin: EmergencyBruno Alonso PachecoÎncă nu există evaluări
- 1.3t - 1.8t Electric Reach TrucksDocument4 pagini1.3t - 1.8t Electric Reach TrucksSabahÎncă nu există evaluări
- LR35 PTM R0.4 Part II PDFDocument233 paginiLR35 PTM R0.4 Part II PDFJose CasadiegoÎncă nu există evaluări
- Mather, The Multinational Advertising and Communications Company, Should Know. TheDocument2 paginiMather, The Multinational Advertising and Communications Company, Should Know. TheМарiя ДеремендаÎncă nu există evaluări
- Splendor NXGDocument4 paginiSplendor NXGRicha SrivastavaÎncă nu există evaluări
- Accessory Catalogue - RETAILDocument15 paginiAccessory Catalogue - RETAILAnonymous BKmmSSqÎncă nu există evaluări
- A Comprehensive Review On Carbon Footprint of Regular Diet and Ways ToDocument20 paginiA Comprehensive Review On Carbon Footprint of Regular Diet and Ways ToAnggurÎncă nu există evaluări
- Price List For Peninsular Malaysia Effective From 8: Company PrivateDocument1 paginăPrice List For Peninsular Malaysia Effective From 8: Company PrivatePC KohÎncă nu există evaluări
- RyanairDocument16 paginiRyanairmanuel radulescuÎncă nu există evaluări