S-ar putea să vă placă și
- Técnicas de control analógico y digitalDocument382 paginiTécnicas de control analógico y digitalcaoji100% (22)
- Permiso para Trabajos en CalienteDocument2 paginiPermiso para Trabajos en CalienteENRIQUE MIRANDA100% (2)
- Permiso para Trabajos en CalienteDocument2 paginiPermiso para Trabajos en CalienteENRIQUE MIRANDA100% (2)
- Permiso para Trabajos en CalienteDocument2 paginiPermiso para Trabajos en CalienteENRIQUE MIRANDA100% (2)
- Permiso para Trabajos en CalienteDocument2 paginiPermiso para Trabajos en CalienteENRIQUE MIRANDA100% (2)
- Permiso para Trabajos en CalienteDocument2 paginiPermiso para Trabajos en CalienteENRIQUE MIRANDA100% (2)
- Permiso para Trabajos en CalienteDocument2 paginiPermiso para Trabajos en CalienteENRIQUE MIRANDA100% (2)
- 3 - Perceptron Multicapa PDFDocument18 pagini3 - Perceptron Multicapa PDFDiego J RubioÎncă nu există evaluări
- Lab6 Linealizacion y Punto de OperacionDocument6 paginiLab6 Linealizacion y Punto de OperacionJohan Adrian Arcos SantacruzÎncă nu există evaluări
- Análisis en El Dominio de La Frecuencia U 6Document31 paginiAnálisis en El Dominio de La Frecuencia U 6Sam Robles Almendarez100% (1)
- Tarea 2 Sistemas DinámicosDocument9 paginiTarea 2 Sistemas DinámicosEdgar Duque100% (1)
- Sistemas de Control: Partes y EstrategiasDocument25 paginiSistemas de Control: Partes y EstrategiasAdrian MorenoÎncă nu există evaluări
- Meneses Pavel Diseño Modulo Educativo Control Sistema Bola VarillaDocument100 paginiMeneses Pavel Diseño Modulo Educativo Control Sistema Bola VarillaAdrianaBenavides100% (1)
- Diseño e Implementación Del Sistema de Automatización de Una Línea de Recicloneo en Planta Concen PDFDocument143 paginiDiseño e Implementación Del Sistema de Automatización de Una Línea de Recicloneo en Planta Concen PDFAigner VC PradoÎncă nu există evaluări
- Control Sesion 2Document220 paginiControl Sesion 2edÎncă nu există evaluări
- Prepráctica Control Bola VigaDocument10 paginiPrepráctica Control Bola VigaDaniel GuillernaÎncă nu există evaluări
- Comunicación de Dos PLC Por: EthernetDocument22 paginiComunicación de Dos PLC Por: EthernetErick RomeroÎncă nu există evaluări
- Jose Vicente Cruz CruzDocument3 paginiJose Vicente Cruz CruzJose V. CruzÎncă nu există evaluări
- Simulink Tutorial CompletoDocument510 paginiSimulink Tutorial CompletoGonzalo1959100% (2)
- Trabajo FisicaDocument44 paginiTrabajo FisicaRafael Arellano CatalanÎncă nu există evaluări
- ALLEX Ed 09-02 PDFDocument16 paginiALLEX Ed 09-02 PDFDiego VelascoÎncă nu există evaluări
- PID - Universidad de Vigo PDFDocument26 paginiPID - Universidad de Vigo PDFJose Camilo Eraso GuerreroÎncă nu există evaluări
- Implementacion de Un Alimentador ElectroneumaticoDocument79 paginiImplementacion de Un Alimentador ElectroneumaticoAn HFÎncă nu există evaluări
- Practica 9 Completa PDFDocument22 paginiPractica 9 Completa PDFManuel De Jesus ValenzuelaÎncă nu există evaluări
- Derivación numérica en LabVIEWDocument7 paginiDerivación numérica en LabVIEWLuis SanchezÎncă nu există evaluări
- Terminologia AutomatizacionDocument18 paginiTerminologia AutomatizacionPablo GonzálezÎncă nu există evaluări
- Control Activo de Rechazo de PerturbaciónDocument15 paginiControl Activo de Rechazo de PerturbaciónMrlex0Încă nu există evaluări
- Problemas ResueltosWinss7V3 PDFDocument71 paginiProblemas ResueltosWinss7V3 PDFuney yaracuyÎncă nu există evaluări
- Control de Un Proceso de TemperaturaDocument28 paginiControl de Un Proceso de TemperaturaDavid Torres HerreraÎncă nu există evaluări
- SIRIUS Arrancadores DirectosDocument8 paginiSIRIUS Arrancadores DirectosChapo GuzmanÎncă nu există evaluări
- Modelado motor DCDocument3 paginiModelado motor DCCarlos Andrés Pérez Ramírez100% (1)
- Cancelación de Los Polos G (Z) Con LosDocument11 paginiCancelación de Los Polos G (Z) Con LosArkantos Jrz DzÎncă nu există evaluări
- Sistema de Control - Tarea N°2Document46 paginiSistema de Control - Tarea N°2Pablo RiquelmeÎncă nu există evaluări
- Simulacion de Circuitos Con SimnonDocument13 paginiSimulacion de Circuitos Con SimnonLuis Montalvo HiroyasuÎncă nu există evaluări
- Practica 1. Procesamiento Digital de Señales. Martínez Díaz Manuel.Document9 paginiPractica 1. Procesamiento Digital de Señales. Martínez Díaz Manuel.Manuel MartínezÎncă nu există evaluări
- 3HAC023932 PS IRB 660-EsDocument64 pagini3HAC023932 PS IRB 660-EsBOSCO TECNOÎncă nu există evaluări
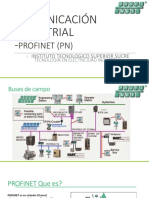
- ProfinetpnDocument41 paginiProfinetpnLuisDavidStarkÎncă nu există evaluări
- Guia Radiaciones Opticas PDFDocument90 paginiGuia Radiaciones Opticas PDFSonia OlivaresÎncă nu există evaluări
- XI Olimpiada Nacional de Robótica ECIBOT-2014Document8 paginiXI Olimpiada Nacional de Robótica ECIBOT-2014Fabian BallenÎncă nu există evaluări
- SistemaControlRobustoDocument43 paginiSistemaControlRobustoJerry Rodriguez FloresÎncă nu există evaluări
- Operaciones de TemporizaciónDocument4 paginiOperaciones de TemporizaciónponchoandradeeÎncă nu există evaluări
- Guia 4 PDFDocument16 paginiGuia 4 PDFLUIS EDUARDO QUISPE MENDOZAÎncă nu există evaluări
- Program Fate K ServoDocument15 paginiProgram Fate K ServoCarlos_Duque1958Încă nu există evaluări
- Configuracion PLC Arduino Nano PDFDocument2 paginiConfiguracion PLC Arduino Nano PDFncandeloÎncă nu există evaluări
- Diseño de Automatización para Riego Tecnificado y SuDocument134 paginiDiseño de Automatización para Riego Tecnificado y SuFrancisco Javier Esquivel Ventura0% (1)
- FTSYSTEMDocument44 paginiFTSYSTEMcristianÎncă nu există evaluări
- Touch Con PICDocument8 paginiTouch Con PICLucho AngelÎncă nu există evaluări
- Controlador Difuso PIC18F4550Document1 paginăControlador Difuso PIC18F4550oskrttgÎncă nu există evaluări
- Apuntes VHDL 2016 PDFDocument93 paginiApuntes VHDL 2016 PDFIsmael ChoixÎncă nu există evaluări
- Caracterización Biomecánica Del Movimiento de Un Brazo Humano Asociado A Un Brazo Robótico de 3GDLDocument51 paginiCaracterización Biomecánica Del Movimiento de Un Brazo Humano Asociado A Un Brazo Robótico de 3GDLJosmell Alva AlcantaraÎncă nu există evaluări
- Escuela Superior Politécnica de Chimborazo: Escuela de Ingeniería Electrónica en Control Y Redes IndustrialesDocument95 paginiEscuela Superior Politécnica de Chimborazo: Escuela de Ingeniería Electrónica en Control Y Redes IndustrialesGalaxji TabÎncă nu există evaluări
- Clase 1 - Intro Matlab PDFDocument61 paginiClase 1 - Intro Matlab PDFMateo Felipe Ramirez ArbelaezÎncă nu există evaluări
- 96-ES8913A Bar PullerDocument54 pagini96-ES8913A Bar Pullercesar_abddÎncă nu există evaluări
- Analisis de Sistemas en El Espacio de EstadosDocument11 paginiAnalisis de Sistemas en El Espacio de EstadosRoberto LeonÎncă nu există evaluări
- SumatoriaDocument20 paginiSumatorialenisbe2011Încă nu există evaluări
- Etiquetadora neumática PLCDocument14 paginiEtiquetadora neumática PLCJairo BecerraÎncă nu există evaluări
- Apendice ADocument6 paginiApendice ATomas Sanchez TronoÎncă nu există evaluări
- Sew Mdx61b EncoderDocument72 paginiSew Mdx61b EncoderEva SuárezÎncă nu există evaluări
- Filtros de KalmanDocument9 paginiFiltros de KalmanFrancisco SerranoÎncă nu există evaluări
- Pirámide Cim PDFDocument8 paginiPirámide Cim PDFJulian ToscanoÎncă nu există evaluări
- Selectividad 3Document24 paginiSelectividad 3robert_rjcÎncă nu există evaluări
- Medida distancias SRF04Document7 paginiMedida distancias SRF04ejoaomelchiorsÎncă nu există evaluări
- Voltímetro USB NeoTeoDocument18 paginiVoltímetro USB NeoTeovevi5860Încă nu există evaluări
- Sistema Fotovoltaico para Bombeo de Agua mediante convertidores de frecuencia CFW500Document32 paginiSistema Fotovoltaico para Bombeo de Agua mediante convertidores de frecuencia CFW500Antonio Adrian MartinezÎncă nu există evaluări
- Bases de Datos Activas IIDocument23 paginiBases de Datos Activas IIDaniel FrcÎncă nu există evaluări
- Ini-Mlogic-003 Instructivo Mantenimiento Medidores de FlujoDocument13 paginiIni-Mlogic-003 Instructivo Mantenimiento Medidores de FlujoFernando Vargas TinocoÎncă nu există evaluări
- Capacitacion Fatek y WeintekDocument16 paginiCapacitacion Fatek y WeintekAlexsander Vasquez100% (1)
- BiorreactorDocument10 paginiBiorreactorMejia Castillo LuceroÎncă nu există evaluări
- Informe de Motor DC TranferenciaDocument12 paginiInforme de Motor DC Tranferenciaedison cedeñoÎncă nu există evaluări
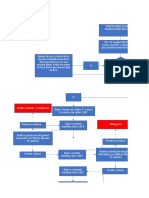
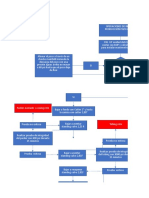
- Diagrama de Flujo Trabajos Slick LineDocument8 paginiDiagrama de Flujo Trabajos Slick LineEsteban Torres GarciaÎncă nu există evaluări
- IDP - JOR Abr 2021Document28 paginiIDP - JOR Abr 2021Esteban Torres GarciaÎncă nu există evaluări
- Trabajos alturas permisoDocument7 paginiTrabajos alturas permisoDavid Zegarra Del CastilloÎncă nu există evaluări
- Diagrama de Flujo Trabajos Slick LineDocument8 paginiDiagrama de Flujo Trabajos Slick LineEsteban Torres GarciaÎncă nu există evaluări
- Formato Unico Producto NuevoDocument5 paginiFormato Unico Producto Nuevoalexanser bastidasÎncă nu există evaluări
- Permiso para Trabajo en CalienteDocument2 paginiPermiso para Trabajo en CalienteIlus Randenfo Desatra MenoroÎncă nu există evaluări
- Diagrama de Flujo Trabajos Slick LineDocument8 paginiDiagrama de Flujo Trabajos Slick LineEsteban Torres GarciaÎncă nu există evaluări
- Cotizacion TapabocasDocument3 paginiCotizacion TapabocasEsteban Torres GarciaÎncă nu există evaluări
- Lean CanvasDocument1 paginăLean CanvasEsteban Torres GarciaÎncă nu există evaluări
- Practica Curva Característica de La Bomba CFDDocument2 paginiPractica Curva Característica de La Bomba CFDEsteban Torres GarciaÎncă nu există evaluări
- Turbina FrancisDocument6 paginiTurbina FrancisEsteban Torres GarciaÎncă nu există evaluări
- Cotizacion TapabocasDocument3 paginiCotizacion TapabocasEsteban Torres GarciaÎncă nu există evaluări
- Laboratorio Transferencia de CalorDocument5 paginiLaboratorio Transferencia de CalorEsteban Torres GarciaÎncă nu există evaluări
- Formulacion de ProyectosDocument7 paginiFormulacion de ProyectosEsteban Torres GarciaÎncă nu există evaluări
- Taller Ética Del Reconocimiento Desde Los Derechos HumanosDocument6 paginiTaller Ética Del Reconocimiento Desde Los Derechos HumanosEsteban Torres GarciaÎncă nu există evaluări
- Practica Curva Característica de La Bomba CFDDocument4 paginiPractica Curva Característica de La Bomba CFDEsteban Torres GarciaÎncă nu există evaluări
- PDF JoinerDocument2 paginiPDF JoinerEsteban Torres GarciaÎncă nu există evaluări
- Tarea 2 Ingenieria de SistemasDocument4 paginiTarea 2 Ingenieria de SistemasGerardo Chavez CovarrubiasÎncă nu există evaluări
- Practica 2Document14 paginiPractica 2Alex UchihaÎncă nu există evaluări
- Primer Examen Parcial SD CDocument10 paginiPrimer Examen Parcial SD CJose MartinezÎncă nu există evaluări
- Ejercicio 1 - David Gutierrez - Estudiante 1Document10 paginiEjercicio 1 - David Gutierrez - Estudiante 1david gutierrezÎncă nu există evaluări
- Tema 3. Estabilidad de Ecuaciones DiferencialesDocument25 paginiTema 3. Estabilidad de Ecuaciones DiferencialesAngel CoronelÎncă nu există evaluări
- Modelo de motor DC usando diagrama de bloquesDocument20 paginiModelo de motor DC usando diagrama de bloqueshectorÎncă nu există evaluări
- Diagrama de Bloques +control PDFDocument77 paginiDiagrama de Bloques +control PDFjuan carlos revillaÎncă nu există evaluări
- Aproximacion de Modelos de Orden SuperiorDocument5 paginiAproximacion de Modelos de Orden Superiorh3lls4intÎncă nu există evaluări
- Sistema de control de presiónDocument19 paginiSistema de control de presiónMauro TheParraviÎncă nu există evaluări
- Funciones de TransferenciaDocument3 paginiFunciones de TransferenciaángelÎncă nu există evaluări
- Capítulo 2 Función de Transferencia, Diagramas de Bloques-EE647-Parte-2Document29 paginiCapítulo 2 Función de Transferencia, Diagramas de Bloques-EE647-Parte-2dino saurioÎncă nu există evaluări
- Trabajo1 G7 PDFDocument16 paginiTrabajo1 G7 PDFOlesya SergeevaÎncă nu există evaluări
- Sistemas Lineales v2Document22 paginiSistemas Lineales v2Freddy GarciaÎncă nu există evaluări
- Reto 3Document6 paginiReto 3Juanita Andrea Santacruz MoralesÎncă nu există evaluări
- Reporte 6Document15 paginiReporte 6Miguel Aguilar GonzalezÎncă nu există evaluări
- Observadores de Estado Discreto - 2016Document36 paginiObservadores de Estado Discreto - 2016Marco SantiagoÎncă nu există evaluări
- Labo 2 ControlDocument16 paginiLabo 2 ControlGEORGE MICHAEL NUÑEZ BACAÎncă nu există evaluări
- Documento Sin TítuloDocument21 paginiDocumento Sin TítuloEdwin CaballeroÎncă nu există evaluări
- Practica Dirigida Control de Procesos IDocument7 paginiPractica Dirigida Control de Procesos IJorge Pineda CarbajalÎncă nu există evaluări
- Plantilla para Reportes de ModeladoDocument4 paginiPlantilla para Reportes de ModeladocruzcoronadoromanrubenÎncă nu există evaluări
- Lab 2 Sistemas de Control 15092021Document16 paginiLab 2 Sistemas de Control 15092021Adalid elaprendizÎncă nu există evaluări
- Final 3Document5 paginiFinal 3Willy Paolo Levano VilcaÎncă nu există evaluări
- Informe Control 2.1Document11 paginiInforme Control 2.1Chino MendozaÎncă nu există evaluări
- LAB03 - Software de Simulación para Control (2023-2)Document28 paginiLAB03 - Software de Simulación para Control (2023-2)Angelo Reyes G.Încă nu există evaluări
- Lab 12 Transformada de Laplace 2023 - Grupo 3 - 3C5 - CDocument32 paginiLab 12 Transformada de Laplace 2023 - Grupo 3 - 3C5 - CCesar Agusto Choque MamaniÎncă nu există evaluări