S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Flexible Spiral Antenna With Microstrip Tapered Infinite Balun For Wearable ApplicationsDocument2 paginiFlexible Spiral Antenna With Microstrip Tapered Infinite Balun For Wearable ApplicationsalexÎncă nu există evaluări
- Industrial Flash Module Series - 20090715Document5 paginiIndustrial Flash Module Series - 20090715RonaldÎncă nu există evaluări
- A5 Microelectronic Systems 5 Nyquist ADDocument25 paginiA5 Microelectronic Systems 5 Nyquist ADKoldodeRostovÎncă nu există evaluări
- Acer Aspire 3810T/3810TZ/3410 Series Quick GuideDocument11 paginiAcer Aspire 3810T/3810TZ/3410 Series Quick GuidevbhardÎncă nu există evaluări
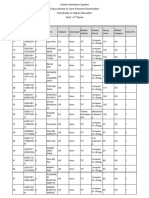
- PCM Seat AllotmentDocument21 paginiPCM Seat AllotmentJoy DasÎncă nu există evaluări
- Portable PV SystemDocument2 paginiPortable PV SystemdangernearÎncă nu există evaluări
- Dhi-Nvr3204 3208 3216Document4 paginiDhi-Nvr3204 3208 3216SoltÎncă nu există evaluări
- Sim68m Specv1.02Document24 paginiSim68m Specv1.02Dejan SpasovskiÎncă nu există evaluări
- Modul 5 Siskom2 MPSK ALYDocument50 paginiModul 5 Siskom2 MPSK ALYFirmansyah KobongsatuÎncă nu există evaluări
- Bbbdocument From VICKY?Document4 paginiBbbdocument From VICKY?OMSAINATH MPONLINEÎncă nu există evaluări
- FMX 004 DatasheetDocument2 paginiFMX 004 DatasheetHuy HeinekenÎncă nu există evaluări
- Instruction Manual: Multi-Smart MPPT Solar Charge ControllerDocument12 paginiInstruction Manual: Multi-Smart MPPT Solar Charge ControllerMiguel Cayuela de PedroÎncă nu există evaluări
- HMM30C VaisalaDocument4 paginiHMM30C VaisalaSiew Fern ChooÎncă nu există evaluări
- Huawei Mobily WiMAX LTE (Samar 707649)Document78 paginiHuawei Mobily WiMAX LTE (Samar 707649)Nasir Iqbal100% (1)
- Reliance Jio and GTL Infra Sign Tower Infrastructure Sharing Deal (Company Update)Document3 paginiReliance Jio and GTL Infra Sign Tower Infrastructure Sharing Deal (Company Update)Shyam SunderÎncă nu există evaluări
- IEEE 802.11s Wireless LAN Mesh Network Technology: Hidenori Aoki, Shinji Takeda, Kengo Yagyu and Akira YamadaDocument9 paginiIEEE 802.11s Wireless LAN Mesh Network Technology: Hidenori Aoki, Shinji Takeda, Kengo Yagyu and Akira YamadagivangustavoÎncă nu există evaluări
- Yamaha RX-V470Document27 paginiYamaha RX-V470Andreas DerksenÎncă nu există evaluări
- NGTB75N60FL2WG Igbt: 75 A, 600 V V 1.70 V E 1.0 MJDocument11 paginiNGTB75N60FL2WG Igbt: 75 A, 600 V V 1.70 V E 1.0 MJJorge Eduardo Oyuela AcostaÎncă nu există evaluări
- Module 6-Storage Area Network - FC SAN - Participant GuideDocument59 paginiModule 6-Storage Area Network - FC SAN - Participant GuiderhsrtaqÎncă nu există evaluări
- 27 VESDA Model Comparison Chart A4 LoresDocument2 pagini27 VESDA Model Comparison Chart A4 Loresmuna hamidÎncă nu există evaluări
- Chapter 10 Sequential Circuit Design: EnhancedDocument1 paginăChapter 10 Sequential Circuit Design: EnhancedCarlos SaavedraÎncă nu există evaluări
- Micom C964C / C964 Modular Remote Terminal Unit - Rtu: Ieds GatewayDocument2 paginiMicom C964C / C964 Modular Remote Terminal Unit - Rtu: Ieds GatewayTomuta StefanÎncă nu există evaluări
- Constant Voltage Constant Current DC Power SupplyDocument56 paginiConstant Voltage Constant Current DC Power SupplySeven HillsÎncă nu există evaluări
- IMXRT1170RMDocument6.214 paginiIMXRT1170RMidmeri100% (1)
- Smart Home Using Cisco Packet Tracer: February 2021Document28 paginiSmart Home Using Cisco Packet Tracer: February 2021vickyÎncă nu există evaluări
- g709 Optical Transport Network Otn White Paper en PDFDocument8 paginig709 Optical Transport Network Otn White Paper en PDFSrijitBanerjeeÎncă nu există evaluări
- I73e SGDV - Sigma-5 Servo Drive Datasheet enDocument24 paginiI73e SGDV - Sigma-5 Servo Drive Datasheet enluisÎncă nu există evaluări
- Cypress Product Roadmap Public 001-89435 - 0LDocument255 paginiCypress Product Roadmap Public 001-89435 - 0LKumar BabuÎncă nu există evaluări
- Mxa710 Spec Sheet Letter enDocument2 paginiMxa710 Spec Sheet Letter enBobÎncă nu există evaluări