S-ar putea să vă placă și
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- WINSEM2022-23 CSE4019 ETH VL2022230503082 2023-03-02 Reference-Material-IDocument35 paginiWINSEM2022-23 CSE4019 ETH VL2022230503082 2023-03-02 Reference-Material-Ipadm kesavÎncă nu există evaluări
- DIP Chap 4 (Filtering in The Frequency Domain) Lect 11Document45 paginiDIP Chap 4 (Filtering in The Frequency Domain) Lect 11kandeelllÎncă nu există evaluări
- Image RestorationDocument70 paginiImage RestorationJoelÎncă nu există evaluări
- Frequency DomainDocument71 paginiFrequency Domainsanju_arora19Încă nu există evaluări
- L19 - Image Restoration IDocument30 paginiL19 - Image Restoration IramadeviÎncă nu există evaluări
- ECE 468: Digital Image Processing: Prof. Sinisa Todorovic Sinisa@eecs - Oregonstate.eduDocument36 paginiECE 468: Digital Image Processing: Prof. Sinisa Todorovic Sinisa@eecs - Oregonstate.eduWikiÎncă nu există evaluări
- Filtering LNDocument43 paginiFiltering LNAgatha AstriseleÎncă nu există evaluări
- Frequency Domain Filtering (Chapter 4) : CS474/674 - Prof. BebisDocument53 paginiFrequency Domain Filtering (Chapter 4) : CS474/674 - Prof. Bebisneoronic17100% (1)
- Digital Image and Video Processing (UEC1722) Unit - I Fundamentals of Image ProcessingDocument35 paginiDigital Image and Video Processing (UEC1722) Unit - I Fundamentals of Image Processingsrinivas CVÎncă nu există evaluări
- Unit - 2 - Part IIIDocument63 paginiUnit - 2 - Part IIIkrishna chaitanyaÎncă nu există evaluări
- Frequency Domain Filtering: CS474/674 - Prof. BebisDocument55 paginiFrequency Domain Filtering: CS474/674 - Prof. Bebisrao3farhat3masoodÎncă nu există evaluări
- Frequency Domain Filtering Image ProcessingDocument24 paginiFrequency Domain Filtering Image ProcessingSankalp_Kallakur_402100% (1)
- Convex Optimization in Image Processing: Ernie EsserDocument9 paginiConvex Optimization in Image Processing: Ernie EsserM Rameez Ur RehmanÎncă nu există evaluări
- Frequency Domain FiltersDocument43 paginiFrequency Domain FiltersRakesh InaniÎncă nu există evaluări
- Image Restoration: B14 Image Analysis Michaelmas 2014 A. Zisserman - Image DegradationsDocument48 paginiImage Restoration: B14 Image Analysis Michaelmas 2014 A. Zisserman - Image DegradationsybÎncă nu există evaluări
- Image Enhancement in The FDDocument22 paginiImage Enhancement in The FDImran BashaÎncă nu există evaluări
- Filtering in Frequency Domain1Document62 paginiFiltering in Frequency Domain1nandkishor joshiÎncă nu există evaluări
- Chapter 5 Image Restoration - 01Document37 paginiChapter 5 Image Restoration - 01Aman Ahmad SiddiqueeÎncă nu există evaluări
- Image Enhancement in The Frequency Domain: GZ Chapter 4Document66 paginiImage Enhancement in The Frequency Domain: GZ Chapter 4Shabrin AhammedÎncă nu există evaluări
- Filtering in The Frequency DomainDocument35 paginiFiltering in The Frequency DomainKarthikeyaÎncă nu există evaluări
- Image Restoration II & Morphological Processing: Comp344 Tutorial Kai ZhangDocument20 paginiImage Restoration II & Morphological Processing: Comp344 Tutorial Kai Zhangtigoldo2008Încă nu există evaluări
- MA111 Lec7 D3D4Document20 paginiMA111 Lec7 D3D4pahnhnykÎncă nu există evaluări
- The Fourier Transform: Jean Baptiste Joseph FourierDocument22 paginiThe Fourier Transform: Jean Baptiste Joseph FourierAbhinav_Batish_1810Încă nu există evaluări
- Digital Image Processing (Chapter 4)Document62 paginiDigital Image Processing (Chapter 4)Md.Nazmul Abdal Shourov100% (1)
- Smoothing Frequency Domain FiltersDocument22 paginiSmoothing Frequency Domain FiltersRaymond PraveenÎncă nu există evaluări
- Lecture03 FT 2DDocument68 paginiLecture03 FT 2DMd Nur-A-Adam DonyÎncă nu există evaluări
- Image Enhancement in The Frequency Domain: GZ Chapter 4Document66 paginiImage Enhancement in The Frequency Domain: GZ Chapter 4ITTAPPA HATTIMANIÎncă nu există evaluări
- Image RestorationDocument66 paginiImage RestorationSanchita GhoshÎncă nu există evaluări
- DIP Lecture 07Document31 paginiDIP Lecture 07sanjila parvinÎncă nu există evaluări
- FIR Filter DesignDocument10 paginiFIR Filter Designvaish20Încă nu există evaluări
- Digital Video: Progressive Scanning: One Full Frame Every 1/30th of A SecondDocument12 paginiDigital Video: Progressive Scanning: One Full Frame Every 1/30th of A Secondsandipprmar007Încă nu există evaluări
- Ideal Filters: S X N S N yDocument26 paginiIdeal Filters: S X N S N ydanielÎncă nu există evaluări
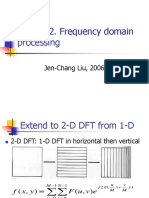
- Chap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Document51 paginiChap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Ashfiya ThahirÎncă nu există evaluări
- 00 - FIR Filtering Results Review & Practical ApplicationsDocument70 pagini00 - FIR Filtering Results Review & Practical Applicationsismaiba97Încă nu există evaluări
- Module 3 2 DZRkw8i1IXDocument72 paginiModule 3 2 DZRkw8i1IXAEC OFFICIALÎncă nu există evaluări
- Lecture 5Document39 paginiLecture 5bedline.salesÎncă nu există evaluări
- Image Enhancement in The Frequency DomainDocument43 paginiImage Enhancement in The Frequency Domainmusicstand29Încă nu există evaluări
- Module 3 Part CDocument29 paginiModule 3 Part CshivubhavvÎncă nu există evaluări
- Image Restoration: Noise Removal Using Frequency Domain FiltersDocument32 paginiImage Restoration: Noise Removal Using Frequency Domain FiltersDuaa HusseinÎncă nu există evaluări
- Image Filtering - 2Document59 paginiImage Filtering - 2Jani Saida ShaikÎncă nu există evaluări
- Image Restoration (Sections 5.1, 5.5, 5.7, 5.9) : CS474/674 - Prof. BebisDocument67 paginiImage Restoration (Sections 5.1, 5.5, 5.7, 5.9) : CS474/674 - Prof. Bebissrc010850% (2)
- Fourier Transform: Naveen SihagDocument54 paginiFourier Transform: Naveen SihagDr. M. Karthigai Pandian Asso Prof ICEÎncă nu există evaluări
- Experiment - 3Document13 paginiExperiment - 3Veda Vyas PotnuruÎncă nu există evaluări
- L-8, 9,10 (Digital ImageProcessing-Image Enhancement in Frequency Domain)Document79 paginiL-8, 9,10 (Digital ImageProcessing-Image Enhancement in Frequency Domain)career Point BastiÎncă nu există evaluări
- Analogfilters UNSW 2009Document48 paginiAnalogfilters UNSW 2009Dimuthu Nuwan AbeysingheÎncă nu există evaluări
- FiltersDocument31 paginiFiltersdjnidubeÎncă nu există evaluări
- Finite Difference Methods For Boundary Value Problems: October 2, 2013Document52 paginiFinite Difference Methods For Boundary Value Problems: October 2, 2013Jaime PlataÎncă nu există evaluări
- 5 - The Bellman EquationDocument8 pagini5 - The Bellman EquationAYUSHI JAINÎncă nu există evaluări
- Support Vector Machines (SVM) : Y.H. HuDocument25 paginiSupport Vector Machines (SVM) : Y.H. HuShopno ChuraÎncă nu există evaluări
- Stuff You MUST Know Cold For AP CalcDocument2 paginiStuff You MUST Know Cold For AP CalccuentaparadescargarÎncă nu există evaluări
- Support Vector Machines: Aurobinda RoutrayDocument33 paginiSupport Vector Machines: Aurobinda RoutrayGpÎncă nu există evaluări
- Fourier TransformDocument45 paginiFourier TransformMarzan Samin AshrafiÎncă nu există evaluări
- Frequeny Domain FilteringDocument48 paginiFrequeny Domain FilteringabcÎncă nu există evaluări
- 7 FirDocument26 pagini7 FirBala MuruganÎncă nu există evaluări
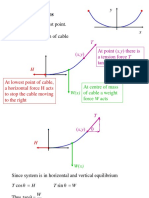
- CatenaryDocument13 paginiCatenaryRamiro RiveraÎncă nu există evaluări
- Frequency Domain Filtering (Chapter 4) : CS474/674 - Prof. BebisDocument59 paginiFrequency Domain Filtering (Chapter 4) : CS474/674 - Prof. BebisMohammed AL-MaaitahÎncă nu există evaluări
- High-Pass and Band-Pass Filtering: CS 450: Introduction To Digital Signal and Image ProcessingDocument17 paginiHigh-Pass and Band-Pass Filtering: CS 450: Introduction To Digital Signal and Image Processingbhoomi achalÎncă nu există evaluări
- EEN 725 Advanced Digital Signal ProcessingDocument29 paginiEEN 725 Advanced Digital Signal ProcessingSaad RashidÎncă nu există evaluări
- Deep Learning Algorithm For Arrhythmia Detection: Hilmy Assodiky, Iwan Syarif, Tessy BadriyahDocument7 paginiDeep Learning Algorithm For Arrhythmia Detection: Hilmy Assodiky, Iwan Syarif, Tessy BadriyahKani MozhiÎncă nu există evaluări
- Identification of Normal and Abnormal Ecg Using Neural NetworkDocument6 paginiIdentification of Normal and Abnormal Ecg Using Neural NetworkKani MozhiÎncă nu există evaluări
- Go L Riz Khatami ZahraDocument103 paginiGo L Riz Khatami ZahraKani MozhiÎncă nu există evaluări
- Electronic Mail SecurityDocument29 paginiElectronic Mail SecurityKani MozhiÎncă nu există evaluări
- A Novel Atrial Fibrillation Prediction Algorithm Applicable To Recordings From Portable DevicesDocument4 paginiA Novel Atrial Fibrillation Prediction Algorithm Applicable To Recordings From Portable DevicesKani MozhiÎncă nu există evaluări
- Classification of ECC SignalsDocument28 paginiClassification of ECC SignalsKani MozhiÎncă nu există evaluări
- Classification of ECG Signals Using Machine Learning Techniques: A SurveyDocument8 paginiClassification of ECG Signals Using Machine Learning Techniques: A SurveyKani MozhiÎncă nu există evaluări
- Btnodes: Design and Deployment of Wireless Networked Embedded SystemsDocument42 paginiBtnodes: Design and Deployment of Wireless Networked Embedded SystemsKani MozhiÎncă nu există evaluări
- Brian 2017Document6 paginiBrian 2017Kani MozhiÎncă nu există evaluări
- ECG Signal ClassificationDocument34 paginiECG Signal ClassificationKani MozhiÎncă nu există evaluări
- Embedded SystemsDocument1 paginăEmbedded SystemsKani MozhiÎncă nu există evaluări
- Automatic Classification of ECG Signal For Heart Disease Diagnosis Using Morphological FeaturesDocument7 paginiAutomatic Classification of ECG Signal For Heart Disease Diagnosis Using Morphological FeaturesKani MozhiÎncă nu există evaluări
- Part 5: Transport Protocols For Wireless Mobile Networks: Sequence NumbersDocument6 paginiPart 5: Transport Protocols For Wireless Mobile Networks: Sequence NumbersKani MozhiÎncă nu există evaluări
- BEI605 Embedded SystemDocument79 paginiBEI605 Embedded SystemKani Mozhi100% (2)
- (TCP Ip) IntroDocument43 pagini(TCP Ip) IntroKani MozhiÎncă nu există evaluări
- On The Design and Control of Wireless Networked Embedded SystemsDocument6 paginiOn The Design and Control of Wireless Networked Embedded SystemsKani MozhiÎncă nu există evaluări
- Today: Wired Embedded Networks: Characteristics and Requirements Some Embedded LansDocument25 paginiToday: Wired Embedded Networks: Characteristics and Requirements Some Embedded LansKani MozhiÎncă nu există evaluări
- cc11Document793 paginicc11s_padu3003@yahoo.comÎncă nu există evaluări
- SSGC-RSGLEG Draft Study On The Applicability of IAL To Cyber Threats Against Civil AviationDocument41 paginiSSGC-RSGLEG Draft Study On The Applicability of IAL To Cyber Threats Against Civil AviationPrachita AgrawalÎncă nu există evaluări
- IEC ShipsDocument6 paginiIEC ShipsdimitaringÎncă nu există evaluări
- Comparitive Study ICICI & HDFCDocument22 paginiComparitive Study ICICI & HDFCshah faisal100% (1)
- Excon2019 ShowPreview02122019 PDFDocument492 paginiExcon2019 ShowPreview02122019 PDFSanjay KherÎncă nu există evaluări
- V737 OverheadDocument50 paginiV737 OverheadnewahÎncă nu există evaluări
- Golf Croquet Refereeing Manual - Croquet AustraliaDocument78 paginiGolf Croquet Refereeing Manual - Croquet AustraliaSenorSushi100% (1)
- DP 2 Human IngenuityDocument8 paginiDP 2 Human Ingenuityamacodoudiouf02Încă nu există evaluări
- DNA ReplicationDocument19 paginiDNA ReplicationLouis HilarioÎncă nu există evaluări
- Opc PPT FinalDocument22 paginiOpc PPT FinalnischalaÎncă nu există evaluări
- Fss Presentation Slide GoDocument13 paginiFss Presentation Slide GoReinoso GreiskaÎncă nu există evaluări
- Turning PointsDocument2 paginiTurning Pointsapi-223780825Încă nu există evaluări
- Gods Omnipresence in The World On Possible MeaninDocument20 paginiGods Omnipresence in The World On Possible MeaninJoan Amanci Casas MuñozÎncă nu există evaluări
- PR KehumasanDocument14 paginiPR KehumasanImamÎncă nu există evaluări
- II 2022 06 Baena-Rojas CanoDocument11 paginiII 2022 06 Baena-Rojas CanoSebastian GaonaÎncă nu există evaluări
- Damodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaDocument25 paginiDamodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaSumanth RoxtaÎncă nu există evaluări
- MGMT Audit Report WritingDocument28 paginiMGMT Audit Report WritingAndrei IulianÎncă nu există evaluări
- Role of Losses in Design of DC Cable For Solar PV ApplicationsDocument5 paginiRole of Losses in Design of DC Cable For Solar PV ApplicationsMaulidia HidayahÎncă nu există evaluări
- Lecturenotes Data MiningDocument23 paginiLecturenotes Data Miningtanyah LloydÎncă nu există evaluări
- Sam Media Recruitment QuestionnaireDocument17 paginiSam Media Recruitment Questionnairechek taiÎncă nu există evaluări
- A Case Study Puga Geothermal System,: OF IndiaDocument7 paginiA Case Study Puga Geothermal System,: OF IndiaPERIKALA TARUNÎncă nu există evaluări
- Module 1: Overview of Applied Behaviour Analysis (ABA)Document37 paginiModule 1: Overview of Applied Behaviour Analysis (ABA)PriyaÎncă nu există evaluări
- Nutrition and CKDDocument20 paginiNutrition and CKDElisa SalakayÎncă nu există evaluări
- From Philo To Plotinus AftermanDocument21 paginiFrom Philo To Plotinus AftermanRaphael888Încă nu există evaluări
- Nama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisDocument2 paginiNama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisOrionj jrÎncă nu există evaluări
- Outdoor Air Pollution: Sources, Health Effects and SolutionsDocument20 paginiOutdoor Air Pollution: Sources, Health Effects and SolutionsCamelia RadulescuÎncă nu există evaluări
- Salads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDocument1.092 paginiSalads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDebora PanzarellaÎncă nu există evaluări
- PED003Document1 paginăPED003ely mae dag-umanÎncă nu există evaluări
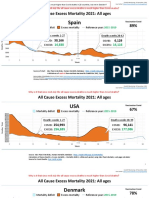
- Countries EXCESS DEATHS All Ages - 15nov2021Document21 paginiCountries EXCESS DEATHS All Ages - 15nov2021robaksÎncă nu există evaluări
- Electro Fashion Sewable LED Kits WebDocument10 paginiElectro Fashion Sewable LED Kits WebAndrei VasileÎncă nu există evaluări
- Chapter3 Elasticity and ForecastingDocument25 paginiChapter3 Elasticity and ForecastingGee JoeÎncă nu există evaluări