S-ar putea să vă placă și
- Gestión de calidad en empresa de maquinariaDocument13 paginiGestión de calidad en empresa de maquinariaLuis RossoÎncă nu există evaluări
- 9 Ecuaciones Diferenciales OrdinariasDocument93 pagini9 Ecuaciones Diferenciales OrdinariasDeydaraTorresÎncă nu există evaluări
- Monografia de Mantenimiento 2Document288 paginiMonografia de Mantenimiento 2Luis RossoÎncă nu există evaluări
- Gestion de La Calidad Instrucciones Monografia 2021 1Document3 paginiGestion de La Calidad Instrucciones Monografia 2021 1Luis RossoÎncă nu există evaluări
- Mecanica de Fluidos 2 - Ugarte PDFDocument231 paginiMecanica de Fluidos 2 - Ugarte PDFYojan Andre Martinez Pucuhuayla100% (7)
- SOLUCION PROB 5 - PD3 2da PARTEDocument2 paginiSOLUCION PROB 5 - PD3 2da PARTELuis RossoÎncă nu există evaluări
- Examen Final MT 242 2020-1-Rosso - Ramos - Luis - EnriqueDocument11 paginiExamen Final MT 242 2020-1-Rosso - Ramos - Luis - EnriqueLuis RossoÎncă nu există evaluări
- MT233 A P1 20182TDocument3 paginiMT233 A P1 20182TLuis RossoÎncă nu există evaluări
- Lámina 2 Rosso LuisDocument4 paginiLámina 2 Rosso LuisLuis RossoÎncă nu există evaluări
- Problemas Sobre Vibraciones Generalizadas: Vibración Debido A Fuerzas ImpulsivasDocument5 paginiProblemas Sobre Vibraciones Generalizadas: Vibración Debido A Fuerzas ImpulsivasJUAN DANIEL VASQUEZ RENGIFOÎncă nu există evaluări
- Solucion Prob 11 Excitacion PDFDocument1 paginăSolucion Prob 11 Excitacion PDFLuis RossoÎncă nu există evaluări
- CVDocument1 paginăCVLuis RossoÎncă nu există evaluări
- P EHB 07 Lab 06 DOLORIERT RALF Archivo PDFDocument3 paginiP EHB 07 Lab 06 DOLORIERT RALF Archivo PDFLuis RossoÎncă nu există evaluări
- Respuesta Impulsiva 2020-IDocument5 paginiRespuesta Impulsiva 2020-IJUAN DANIEL VASQUEZ RENGIFOÎncă nu există evaluări
- Solucion Vibra General Prob 2Document1 paginăSolucion Vibra General Prob 2JUAN DANIEL VASQUEZ RENGIFOÎncă nu există evaluări
- T 3Document2 paginiT 3Luis RossoÎncă nu există evaluări
- Ensayo de Arena Mi BroDocument24 paginiEnsayo de Arena Mi BroLuis RossoÎncă nu există evaluări
- 9 Ecuaciones Diferenciales OrdinariasDocument93 pagini9 Ecuaciones Diferenciales OrdinariasDeydaraTorresÎncă nu există evaluări
- Cap 01Document39 paginiCap 01IiOna GpÎncă nu există evaluări
- Laboratorio de Análisis de Moldeo y ColadaDocument14 paginiLaboratorio de Análisis de Moldeo y ColadaAnonymous 1tskC3GV8Încă nu există evaluări
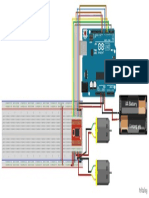
- FritzingDocument1 paginăFritzingLuis RossoÎncă nu există evaluări
- Ensayo de Arena Mi BroDocument24 paginiEnsayo de Arena Mi BroLuis RossoÎncă nu există evaluări
- Cap 01Document39 paginiCap 01IiOna GpÎncă nu există evaluări
- Proyecto MT127Document4 paginiProyecto MT127Luis RossoÎncă nu există evaluări
- Bioquimica Ambiental 1Document3 paginiBioquimica Ambiental 1Luis RossoÎncă nu există evaluări
- El potencial del paiche para el desarrollo económico del PerúDocument40 paginiEl potencial del paiche para el desarrollo económico del PerúLuis RossoÎncă nu există evaluări
- Flip FlopDocument1 paginăFlip FlopLuis RossoÎncă nu există evaluări
- Sillon PlegableDocument2 paginiSillon PlegableLuis RossoÎncă nu există evaluări
- Caratula para Maquinas ElectricasDocument1 paginăCaratula para Maquinas ElectricasLuis RossoÎncă nu există evaluări
- Informe sobre anulación de resolución de sanción por rotulo desprendido de frasco de salsaDocument2 paginiInforme sobre anulación de resolución de sanción por rotulo desprendido de frasco de salsaLuis RossoÎncă nu există evaluări
- Plan de Ahorro TeoriaDocument7 paginiPlan de Ahorro TeoriaJosé Pablo Perez MartinezÎncă nu există evaluări
- Glosario de términos contables en inglésDocument3 paginiGlosario de términos contables en inglésSoyUnHamsterÎncă nu există evaluări
- Especificaciones - 2023 Polaris RANGER XP 1000 Premium Super Graphite Con Acentos de Cal LevantadaDocument2 paginiEspecificaciones - 2023 Polaris RANGER XP 1000 Premium Super Graphite Con Acentos de Cal Levantadajulian andres ramos ramirezÎncă nu există evaluări
- INF Prac PreProfesionales FINALDocument42 paginiINF Prac PreProfesionales FINALMiguel Cesar Carbajal ArceÎncă nu există evaluări
- Fases Del Proceso ContableDocument4 paginiFases Del Proceso ContableMarisol Hernández100% (1)
- Control Interno 63 de 90Document9 paginiControl Interno 63 de 90lilianaÎncă nu există evaluări
- Trabajo Empresa Fruver PoliDocument10 paginiTrabajo Empresa Fruver PoliDiana Ximena Alvira TriviñoÎncă nu există evaluări
- Manual de Estudio para La Certificación Como Asesor PrevisionalDocument1 paginăManual de Estudio para La Certificación Como Asesor Previsionalchancarloshumberto31Încă nu există evaluări
- Solis 20kW LV DC - FichaTecnicaDocument2 paginiSolis 20kW LV DC - FichaTecnicaSANDRAÎncă nu există evaluări
- Qué Es La Cultura EcológicaDocument4 paginiQué Es La Cultura EcológicaManuel Medina ValdesÎncă nu există evaluări
- El Sol (Madrid. 1917) - 21-4-1927Document12 paginiEl Sol (Madrid. 1917) - 21-4-1927Dory Cano DíazÎncă nu există evaluări
- Estructuras de Control Parte I - Modulo IDocument22 paginiEstructuras de Control Parte I - Modulo ICesar AllainÎncă nu există evaluări
- Sepárador L GDocument32 paginiSepárador L GMelita AndreaÎncă nu există evaluări
- Convenio de Acuerdo A Ley (1) TripartitoDocument9 paginiConvenio de Acuerdo A Ley (1) TripartitoCarlosEnriqueFelixYañezYañezÎncă nu există evaluări
- Formato de SMEDDocument3 paginiFormato de SMEDJesús Martínez MtzÎncă nu există evaluări
- Caso de EstudioDocument5 paginiCaso de EstudioAlberto OrtegaÎncă nu există evaluări
- Batería de Ion de SodioDocument5 paginiBatería de Ion de SodioPatricio CatagñaÎncă nu există evaluări
- Auto Que Saca Los Bienes A RemateDocument1 paginăAuto Que Saca Los Bienes A RemateLicArzateÎncă nu există evaluări
- Carta de Solicitud Karen CastañedaDocument6 paginiCarta de Solicitud Karen CastañedaYuli BocotaÎncă nu există evaluări
- Cronograma de ActividadesDocument4 paginiCronograma de Actividadesmario23797979Încă nu există evaluări
- Ejes IIRSA SuraméricaDocument6 paginiEjes IIRSA SuraméricaYony VásquezÎncă nu există evaluări
- Poet - 19 - 007 - Rev.0 - Shotcrete en SubterráneoDocument18 paginiPoet - 19 - 007 - Rev.0 - Shotcrete en SubterráneoElvis Sandro Montesinos chÎncă nu există evaluări
- Rubrica Evaluacion EnsayoDocument4 paginiRubrica Evaluacion EnsayoVictor BritoÎncă nu există evaluări
- La Pedagogia Del Ocio Nuevos DesafiosDocument104 paginiLa Pedagogia Del Ocio Nuevos DesafiosSara RiosÎncă nu există evaluări
- Cerveza Artesanal de MaracuyáDocument161 paginiCerveza Artesanal de MaracuyáDennis Carbajal Rodriguez50% (2)
- Folleto Ing Industrial 2022Document12 paginiFolleto Ing Industrial 2022Yerald PeraltaÎncă nu există evaluări
- Fundación de Lima, Capital de PerúDocument32 paginiFundación de Lima, Capital de PerúVera Lucia EleÎncă nu există evaluări
- Tw-Gestion de Operaciones Pa2 2024 v3Document2 paginiTw-Gestion de Operaciones Pa2 2024 v3TUTOR WINNERÎncă nu există evaluări
- DERECHO ADMINISTRATIVO II PRESENTACIONES CompletoDocument80 paginiDERECHO ADMINISTRATIVO II PRESENTACIONES CompletoGuillermo Alejandro CameyÎncă nu există evaluări
- Aut 3era Entrega OrlistarDocument1 paginăAut 3era Entrega OrlistarPts PtsÎncă nu există evaluări