S-ar putea să vă placă și
- FOC Design of PMSM by Multi-Objective OptimizationDocument7 paginiFOC Design of PMSM by Multi-Objective OptimizationHùng MạnhÎncă nu există evaluări
- Energy Efficient Control of Three-Phase Induction MotorDocument9 paginiEnergy Efficient Control of Three-Phase Induction MotoriiradminÎncă nu există evaluări
- Review of Sliding Mode Observers For Sensorless Co PDFDocument9 paginiReview of Sliding Mode Observers For Sensorless Co PDFbobjiÎncă nu există evaluări
- 53e9aeabb7602d97038d1360 0Document13 pagini53e9aeabb7602d97038d1360 0Sung Ryoung LimÎncă nu există evaluări
- FEM RotorDocument5 paginiFEM RotorMirceaÎncă nu există evaluări
- Comparative Study of Sensorless Control Methods of PMSM DrivesDocument23 paginiComparative Study of Sensorless Control Methods of PMSM DrivesVinh LeÎncă nu există evaluări
- Optimization Techniques To Enhance The Performance of Induction Motorhannan2017 PDFDocument16 paginiOptimization Techniques To Enhance The Performance of Induction Motorhannan2017 PDFYasir AlameenÎncă nu există evaluări
- Optimized Robust Cruise Control System for an Electric VehicleDocument9 paginiOptimized Robust Cruise Control System for an Electric VehicleMuhammad Aseer KhanÎncă nu există evaluări
- PSO Based RP-MRAS Estimator For 3ph IMDocument30 paginiPSO Based RP-MRAS Estimator For 3ph IMSalim AhmedÎncă nu există evaluări
- Microprocessors and Microsystems: L. Senthil Murugan, P. MaruthupandiDocument7 paginiMicroprocessors and Microsystems: L. Senthil Murugan, P. MaruthupandiSung Ryoung LimÎncă nu există evaluări
- Multi ObjectiveDocument11 paginiMulti ObjectiveAdam ThomsonÎncă nu există evaluări
- A New Adaptive SMO For Speed Estimation of Sensorless Induction Motor Drives at Zero and Very Low FrequenciesDocument11 paginiA New Adaptive SMO For Speed Estimation of Sensorless Induction Motor Drives at Zero and Very Low FrequenciesUma SathyadevanÎncă nu există evaluări
- Machines 10 00559Document16 paginiMachines 10 00559pedroÎncă nu există evaluări
- Comparative Study of Sensorless Control Methods of PMSM DrivesDocument24 paginiComparative Study of Sensorless Control Methods of PMSM DrivesbrightmoreÎncă nu există evaluări
- Multidisciplinary Design Optimization Methods - Gang - LeiDocument251 paginiMultidisciplinary Design Optimization Methods - Gang - LeiKerr HoÎncă nu există evaluări
- FEM Based Design and Performance Analysis of 2-Poles Universal MotorDocument15 paginiFEM Based Design and Performance Analysis of 2-Poles Universal MotorBalaji DDÎncă nu există evaluări
- Introduction To PMSM MachineDocument5 paginiIntroduction To PMSM MachineMd QutubuddinÎncă nu există evaluări
- Designof Sliding Mode Speed Controllerfor Switched ReluctanceDocument6 paginiDesignof Sliding Mode Speed Controllerfor Switched Reluctancegodspower brunoÎncă nu există evaluări
- 1.3 The State-of-Art Design Optimization Methods 17Document6 pagini1.3 The State-of-Art Design Optimization Methods 17gurunathan14Încă nu există evaluări
- Performance Improvement of Alternators With SwitchDocument9 paginiPerformance Improvement of Alternators With SwitchfatihÎncă nu există evaluări
- Decentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlDocument10 paginiDecentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlNirav ChauhanÎncă nu există evaluări
- Refer 5Document14 paginiRefer 5Vaishnavi BharatiÎncă nu există evaluări
- Adaptive Torque Pulsation Compensation For A High-Torque DC Brushless Permanent Magnet MotorDocument6 paginiAdaptive Torque Pulsation Compensation For A High-Torque DC Brushless Permanent Magnet Motorfong jeffÎncă nu există evaluări
- Speed Control of A 2HP DC MotorDocument25 paginiSpeed Control of A 2HP DC MotorEdul BrianÎncă nu există evaluări
- Designing Energy Efficient Traction Machines For Electric and Hybrid VehiclesDocument9 paginiDesigning Energy Efficient Traction Machines For Electric and Hybrid VehicleskodeegÎncă nu există evaluări
- Optimum Design of Proportional-Integral Controllers in Grid-Integrated PMSG-based Wind Energy Conversion SystemDocument26 paginiOptimum Design of Proportional-Integral Controllers in Grid-Integrated PMSG-based Wind Energy Conversion SystemPriyanka GuptaÎncă nu există evaluări
- DD Comp19 Modular Full-Bridge Converter For Three-Phase Switched Reluctance Motors With Integrated Fault-Tolerance CapabilityDocument13 paginiDD Comp19 Modular Full-Bridge Converter For Three-Phase Switched Reluctance Motors With Integrated Fault-Tolerance CapabilityAhmet Can YULAFÎncă nu există evaluări
- Vector Control of Permanent Magnet Synchronous MotorDocument51 paginiVector Control of Permanent Magnet Synchronous MotorFAIZAN ALIÎncă nu există evaluări
- Sustainability 13 00729 v2Document37 paginiSustainability 13 00729 v2Srishen BVÎncă nu există evaluări
- FractionalorderslidingDocument15 paginiFractionalorderslidingAddisu TsehayÎncă nu există evaluări
- Optimal Vector ControlDocument10 paginiOptimal Vector ControlJEFFERSSON DAVID BASTIDAS GAONAÎncă nu există evaluări
- Methodology For Cage Shape Optimization of A Permanent Magnet Synchronous Motor Under Line Start ConditionsDocument4 paginiMethodology For Cage Shape Optimization of A Permanent Magnet Synchronous Motor Under Line Start ConditionsHamza farooqÎncă nu există evaluări
- Field-Weakening Control Schemes For High-Speed Drives Based On Induction Motors: A ComparisonDocument9 paginiField-Weakening Control Schemes For High-Speed Drives Based On Induction Motors: A ComparisonTrần Tấn LộcÎncă nu există evaluări
- Energy Efficient Control of Three-Phase Induction MotorDocument10 paginiEnergy Efficient Control of Three-Phase Induction MotorGilian DantierÎncă nu există evaluări
- Clamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachDocument10 paginiClamp-Force Estimation For A Brake-by-Wire System: A Sensor-Fusion ApproachHsan HaddarÎncă nu există evaluări
- Ref 1Document9 paginiRef 1Dwiky PurbacÎncă nu există evaluări
- ! - BB Energies-15 2022 Speed Determination Is Crucial in Motors' Efficiency Estimation.Document15 pagini! - BB Energies-15 2022 Speed Determination Is Crucial in Motors' Efficiency Estimation.Borislav BrnjadaÎncă nu există evaluări
- Research Article: A DSP-Controlled Permanent Magnet Synchronous Motor Control System For Hybrid VehiclesDocument9 paginiResearch Article: A DSP-Controlled Permanent Magnet Synchronous Motor Control System For Hybrid VehiclesMeryouma LarbÎncă nu există evaluări
- American Journal of Engineering and Technology Management: LoginDocument14 paginiAmerican Journal of Engineering and Technology Management: Loginalvin castroÎncă nu există evaluări
- Permanent Magnet Synchronous Motor Parameter Identification Using Particle Swarm OptimizationDocument8 paginiPermanent Magnet Synchronous Motor Parameter Identification Using Particle Swarm OptimizationSrinivas KamarsuÎncă nu există evaluări
- Motores de Imánes Permanentes y de InductanciaDocument5 paginiMotores de Imánes Permanentes y de InductanciaFreddy Julián Chipugsi CaleroÎncă nu există evaluări
- On Modeling of A Four-Quadrant Switched PDFDocument11 paginiOn Modeling of A Four-Quadrant Switched PDFSergeyÎncă nu există evaluări
- Speed Control of DC Motor Using Neural Network ConfigurationDocument4 paginiSpeed Control of DC Motor Using Neural Network Configurationtariq76Încă nu există evaluări
- EM DynamicPaperDocument10 paginiEM DynamicPaperNimish PrabhukhanolkarÎncă nu există evaluări
- SRM DesignDocument11 paginiSRM Designapi-19827661Încă nu există evaluări
- Induction Motor Speed Control Using Fuzzy Logic Controller: AbstractDocument15 paginiInduction Motor Speed Control Using Fuzzy Logic Controller: AbstractAvinash VenkatÎncă nu există evaluări
- Simulation-Based Approach To Application Fitness For An E-BikeDocument6 paginiSimulation-Based Approach To Application Fitness For An E-BikeBatuhan SincanÎncă nu există evaluări
- Design of High Efficiency Electrical Motors For A Hybrid Electric VehicleDocument14 paginiDesign of High Efficiency Electrical Motors For A Hybrid Electric Vehicleapi-3709675100% (1)
- Comparison of The Speedy Estimate Methods of The Induction MotorsDocument12 paginiComparison of The Speedy Estimate Methods of The Induction MotorsTELKOMNIKAÎncă nu există evaluări
- Simplified Analytical Machine Sizing For Surface Mounted Permanent Magnet MachinesDocument7 paginiSimplified Analytical Machine Sizing For Surface Mounted Permanent Magnet MachinesBiswajit SahaÎncă nu există evaluări
- Design of Electro Mechanical ActuatorsDocument17 paginiDesign of Electro Mechanical Actuatorsmohdbaseerullah123Încă nu există evaluări
- Energies 15 08260 v3Document39 paginiEnergies 15 08260 v313.ธนดล กองธรรมÎncă nu există evaluări
- Fast Optimization of The Magnetic Model by Means of Reluctance Network For PMa-SynRMDocument6 paginiFast Optimization of The Magnetic Model by Means of Reluctance Network For PMa-SynRMJoao Pedro QuevedoÎncă nu există evaluări
- Various Control Methods of Permanent Magnet Synchronous Motor Drives in Electric Vehicle: A Technical ReviewDocument5 paginiVarious Control Methods of Permanent Magnet Synchronous Motor Drives in Electric Vehicle: A Technical ReviewTELKOMNIKAÎncă nu există evaluări
- JOAPE21361678566600Document9 paginiJOAPE21361678566600benlahnecheÎncă nu există evaluări
- Journal Jpe 15-5 1658292190Document12 paginiJournal Jpe 15-5 1658292190Nuri KaraoğlanÎncă nu există evaluări
- Performance - Comparison EV ApplnDocument15 paginiPerformance - Comparison EV Applnmanoish07Încă nu există evaluări
- PM BLDC RatingsDocument7 paginiPM BLDC RatingsBHARDA KUNJÎncă nu există evaluări
- A PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorDocument5 paginiA PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotordanielzÎncă nu există evaluări
- Backward Classes Welfare Department Hostels DetailsDocument56 paginiBackward Classes Welfare Department Hostels Detailsmohan SRÎncă nu există evaluări
- Curriculum Vitae: Mohan S RDocument2 paginiCurriculum Vitae: Mohan S Rmohan SRÎncă nu există evaluări
- Compressed Air Vehicle: A Review: Saurabh Pathak, Kontham Swetha, V.Sreedhar, V.S.V PrabhakarDocument5 paginiCompressed Air Vehicle: A Review: Saurabh Pathak, Kontham Swetha, V.Sreedhar, V.S.V Prabhakarmohan SRÎncă nu există evaluări
- Trends in Machinetools PDFDocument6 paginiTrends in Machinetools PDFmohan SRÎncă nu există evaluări
- Curriculum Vitae: Mohan S RDocument2 paginiCurriculum Vitae: Mohan S Rmohan SRÎncă nu există evaluări
- Model Question papers for Public Health Engineering TechnicianDocument13 paginiModel Question papers for Public Health Engineering Technicianmohan SRÎncă nu există evaluări
- Curriculum Vitae: Mohan S RDocument2 paginiCurriculum Vitae: Mohan S Rmohan SRÎncă nu există evaluări
- Curriculum Vitae: Mohan S RDocument2 paginiCurriculum Vitae: Mohan S Rmohan SRÎncă nu există evaluări
- Curriculum Vitae: Mohan S RDocument2 paginiCurriculum Vitae: Mohan S Rmohan SRÎncă nu există evaluări
- Curriculum Vitae: Mohan S RDocument2 paginiCurriculum Vitae: Mohan S Rmohan SRÎncă nu există evaluări
- Trends in MachinetoolsDocument8 paginiTrends in Machinetoolsmohan SRÎncă nu există evaluări
- Multi-Purpose Machine Tool: A Key To Increased Productivity, Decreased Cost and Saving in Power Consumption and Floor Area RequirementDocument6 paginiMulti-Purpose Machine Tool: A Key To Increased Productivity, Decreased Cost and Saving in Power Consumption and Floor Area Requirementmohan SRÎncă nu există evaluări
- Air Powered CarsDocument1 paginăAir Powered Carsmohan SRÎncă nu există evaluări
- Recruitment of Group-B Group-C Posts in BWSSB Provisional Answer Keys Subject: General Knowledge (Pu Level) 100 Marks - 100 QuestionsDocument1 paginăRecruitment of Group-B Group-C Posts in BWSSB Provisional Answer Keys Subject: General Knowledge (Pu Level) 100 Marks - 100 Questionsmohan SRÎncă nu există evaluări
- University Seat Number: 1DB16ME439 Student Name: Mohan S R Semester: 7 Subject Code Subject Name Internal Marks External Marks Total ResultDocument2 paginiUniversity Seat Number: 1DB16ME439 Student Name: Mohan S R Semester: 7 Subject Code Subject Name Internal Marks External Marks Total Resultmohan SRÎncă nu există evaluări
- University Seat Number: 1DB16ME425 Student Name: Hemalatha G Semester: 7 Subject Code Subject Name Internal Marks External Marks Total ResultDocument2 paginiUniversity Seat Number: 1DB16ME425 Student Name: Hemalatha G Semester: 7 Subject Code Subject Name Internal Marks External Marks Total Resultmohan SRÎncă nu există evaluări
- VTU ResultDocument2 paginiVTU Resultmohan SRÎncă nu există evaluări
- University Seat Number: 1DB16ME439 Student Name: Mohan S R Semester: 7 Subject Code Subject Name Internal Marks External Marks Total ResultDocument2 paginiUniversity Seat Number: 1DB16ME439 Student Name: Mohan S R Semester: 7 Subject Code Subject Name Internal Marks External Marks Total Resultmohan SRÎncă nu există evaluări
- Trends in Machinetools PDFDocument6 paginiTrends in Machinetools PDFmohan SRÎncă nu există evaluări
- "Air Powered Car - Future of Transportation": A Seminar Report OnDocument37 pagini"Air Powered Car - Future of Transportation": A Seminar Report OnMithun RoyaldudeÎncă nu există evaluări
- VTU ResultDocument2 paginiVTU Resultmohan SRÎncă nu există evaluări
- HAL MRO OverhaulDocument49 paginiHAL MRO Overhaulmohan SRÎncă nu există evaluări
- University Seat Number: 1DB16ME425 Student Name: Hemalatha G Semester: 7 Subject Code Subject Name Internal Marks External Marks Total ResultDocument2 paginiUniversity Seat Number: 1DB16ME425 Student Name: Hemalatha G Semester: 7 Subject Code Subject Name Internal Marks External Marks Total Resultmohan SRÎncă nu există evaluări
- Visvesvaraya Technological UniversityDocument8 paginiVisvesvaraya Technological Universitymohan SRÎncă nu există evaluări
- Visvesvaraya Technological UniversityDocument8 paginiVisvesvaraya Technological Universitymohan SRÎncă nu există evaluări
- University Seat Number: 1DB16ME439 Student Name: Mohan S R Semester: 7 Subject Code Subject Name Internal Marks External Marks Total ResultDocument2 paginiUniversity Seat Number: 1DB16ME439 Student Name: Mohan S R Semester: 7 Subject Code Subject Name Internal Marks External Marks Total Resultmohan SRÎncă nu există evaluări
- University Seat Number: 1DB16ME439 Student Name: Mohan S R Semester: 7 Subject Code Subject Name Internal Marks External Marks Total ResultDocument2 paginiUniversity Seat Number: 1DB16ME439 Student Name: Mohan S R Semester: 7 Subject Code Subject Name Internal Marks External Marks Total Resultmohan SRÎncă nu există evaluări
- VTU ResultDocument2 paginiVTU Resultmohan SRÎncă nu există evaluări
- University Seat Number: 1DB16ME439 Student Name: Mohan S R Semester: 7 Subject Code Subject Name Internal Marks External Marks Total ResultDocument2 paginiUniversity Seat Number: 1DB16ME439 Student Name: Mohan S R Semester: 7 Subject Code Subject Name Internal Marks External Marks Total Resultmohan SRÎncă nu există evaluări
- Modular Multilevel Converter For Direct MVDC Connection of Offshore Wind FarmsDocument7 paginiModular Multilevel Converter For Direct MVDC Connection of Offshore Wind Farmsjose_jose_jose_89Încă nu există evaluări
- B E M E E, 2013: 2 Marks Reserved For Neat and Well Organized AnswersDocument3 paginiB E M E E, 2013: 2 Marks Reserved For Neat and Well Organized Answersrony RkÎncă nu există evaluări
- Assignment 2 Industrial PDFDocument23 paginiAssignment 2 Industrial PDFZaid Masood0% (1)
- EE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherDocument34 paginiEE-211 Linear Circuit Analysis: Dr. Hadeed Ahmed SherHadeedAhmedSherÎncă nu există evaluări
- Design and Prototyping Methods For Brushless Motors and Motor ControlDocument135 paginiDesign and Prototyping Methods For Brushless Motors and Motor Controlscardig0% (1)
- FFB CableDocument3 paginiFFB CableNaveed IrshadÎncă nu există evaluări
- De Conti Et Al. - 2015 - A Review of Return-Stroke Models Based On TransmisDocument9 paginiDe Conti Et Al. - 2015 - A Review of Return-Stroke Models Based On TransmisToky Fanambinana RanaivoarisoaÎncă nu există evaluări
- A Study of The Initial Surge Distribution inDocument17 paginiA Study of The Initial Surge Distribution inibrahimÎncă nu există evaluări
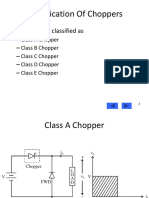
- Classification of Choppers: - Choppers Are Classified AsDocument30 paginiClassification of Choppers: - Choppers Are Classified AskanithanÎncă nu există evaluări
- Tutorial 2Document2 paginiTutorial 2Srinath PvtÎncă nu există evaluări
- Instrumentation For StudentsDocument157 paginiInstrumentation For StudentsBalasubramanyaÎncă nu există evaluări
- Experiment No. 1: Short Line InvestigationDocument19 paginiExperiment No. 1: Short Line InvestigationJoseph VitoÎncă nu există evaluări
- MCQs On Transient CircuitsDocument1 paginăMCQs On Transient CircuitsMoises Padayogdog Male IIÎncă nu există evaluări
- Catalog KvtesterDocument25 paginiCatalog KvtesterDIBOR,C.A DIBORÎncă nu există evaluări
- 2010 Eminence CatalogDocument56 pagini2010 Eminence Catalogszolid79100% (1)
- Three-Phase Common Mode Inductor Design and Size MinimizationDocument9 paginiThree-Phase Common Mode Inductor Design and Size MinimizationCarlos DPÎncă nu există evaluări
- A Novel AC To AC Wireless Power Transfer SystemDocument6 paginiA Novel AC To AC Wireless Power Transfer Systemarunkumarmurugesan88Încă nu există evaluări
- Vacuum Contactor Switching Phenomena PDFDocument9 paginiVacuum Contactor Switching Phenomena PDFjulianvillajosÎncă nu există evaluări
- JEE Main 2024 (April 8 Shift 2) Question Paper with Solutions [PDF]Document16 paginiJEE Main 2024 (April 8 Shift 2) Question Paper with Solutions [PDF]statusworld8480Încă nu există evaluări
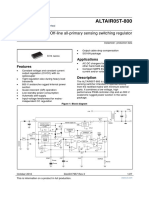
- Altair 05 TRDocument27 paginiAltair 05 TRGenivaldo CostaÎncă nu există evaluări
- Answer KeyDocument28 paginiAnswer KeyKrishnandrk 5577Încă nu există evaluări
- EEC 249 Electric Circuit 2 THEORY - Unesco3Document28 paginiEEC 249 Electric Circuit 2 THEORY - Unesco3Luise ShadrachÎncă nu există evaluări
- EnglishDocument26 paginiEnglishTelkom BlimbingÎncă nu există evaluări
- ECE 3074 AC Circuits Lab Lab 2: Winding Your Own Inductors & Making AC Measurements With An OscilloscopeDocument6 paginiECE 3074 AC Circuits Lab Lab 2: Winding Your Own Inductors & Making AC Measurements With An OscilloscopeZiad Mohmed FawzyÎncă nu există evaluări
- Experiment No. 04Document11 paginiExperiment No. 04Kris Dominic RubillosÎncă nu există evaluări
- IN Maritime: Guidelines FOR EarthingDocument36 paginiIN Maritime: Guidelines FOR EarthingKunalan AhthilhitanÎncă nu există evaluări
- Unit 6: Electrical and Electronic PrinciplesDocument16 paginiUnit 6: Electrical and Electronic Principlesশাজারাতুল ইসলাম রাসেলÎncă nu există evaluări
- L11 - Faraday's Law, Inductance, Inductor, Mutual InductanceDocument16 paginiL11 - Faraday's Law, Inductance, Inductor, Mutual InductanceWira YudhaÎncă nu există evaluări
- Department of Computer Engineering 22215 EEC MCQ (Elements of Electrical Engineering)Document34 paginiDepartment of Computer Engineering 22215 EEC MCQ (Elements of Electrical Engineering)Viraj TiwareÎncă nu există evaluări
- PYQs 1998 To 2021 NCERT Based All 96 Chapters & Analysis-1Document23 paginiPYQs 1998 To 2021 NCERT Based All 96 Chapters & Analysis-1Phoenix RockiÎncă nu există evaluări





























































































![JEE Main 2024 (April 8 Shift 2) Question Paper with Solutions [PDF]](https://imgv2-2-f.scribdassets.com/img/document/722701238/149x198/2a2dbd2236/1713028217?v=1)