S-ar putea să vă placă și
- Manual Scratch LiveDocument32 paginiManual Scratch LiveOlenic CorinaÎncă nu există evaluări
- Curriculum VitaeDocument5 paginiCurriculum VitaeCharles Maurice ParraÎncă nu există evaluări
- Resumen Electro-Neumatica Tica 2021 IiiDocument10 paginiResumen Electro-Neumatica Tica 2021 IiiJuanMartinÎncă nu există evaluări
- Ii. - Lab 6.3 Neumatica Grupos 2 Cili 2020 IiDocument6 paginiIi. - Lab 6.3 Neumatica Grupos 2 Cili 2020 IiJuanMartinÎncă nu există evaluări
- Exp Un Solo RelayDocument5 paginiExp Un Solo RelayJuanMartinÎncă nu există evaluări
- 3.2 CCHH Diagrama de Carga - Energia Del Agua - Diseño Camara de Carga - RTPDocument52 pagini3.2 CCHH Diagrama de Carga - Energia Del Agua - Diseño Camara de Carga - RTPJuanMartinÎncă nu există evaluări
- Manejo Integral Del Sofware PowerFactory DIgSILENTDocument22 paginiManejo Integral Del Sofware PowerFactory DIgSILENTJuanMartinÎncă nu există evaluări
- 3.1 Graficos de Diagramas de Duracion de Caudales - RTPDocument6 pagini3.1 Graficos de Diagramas de Duracion de Caudales - RTPJuanMartinÎncă nu există evaluări
- S04.s1 Recta en R3Document35 paginiS04.s1 Recta en R3JuanMartinÎncă nu există evaluări
- Diagrama Unifilar Del Sistema ElectricoDocument181 paginiDiagrama Unifilar Del Sistema ElectricoJuanMartinÎncă nu există evaluări
- Libro Instalaciones Elctricas IDocument296 paginiLibro Instalaciones Elctricas IVictor Hugo Alvarez RicoÎncă nu există evaluări
- MCI Problemas Guido Pinedo PDFDocument40 paginiMCI Problemas Guido Pinedo PDFJuanMartinÎncă nu există evaluări
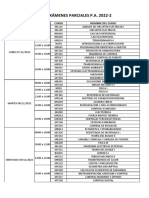
- Rol de Examenes Parciales P.A. 2022-2 PDFDocument2 paginiRol de Examenes Parciales P.A. 2022-2 PDFJuanMartinÎncă nu există evaluări
- Turbo FinalDocument45 paginiTurbo FinalJuanMartinÎncă nu există evaluări
- L2UNI IC02ASistemasDocument12 paginiL2UNI IC02ASistemasJuanMartinÎncă nu există evaluări
- 1.2 - MT221 Unidad 1b Diagramas de Bloques 2022-2Document45 pagini1.2 - MT221 Unidad 1b Diagramas de Bloques 2022-2JuanMartinÎncă nu există evaluări
- Datos Ejercicio 1 Digsilent V.15.1.7Document29 paginiDatos Ejercicio 1 Digsilent V.15.1.7JuanMartinÎncă nu există evaluări
- FOLLETO DEL CURSO LA ENSEÑANZA DE ESPAÑOL A EXTRANJEROSiDocument5 paginiFOLLETO DEL CURSO LA ENSEÑANZA DE ESPAÑOL A EXTRANJEROSiRosa ChiclayoÎncă nu există evaluări
- Plano de ReduccionesDocument12 paginiPlano de ReduccionesJuanMartinÎncă nu există evaluări
- Concurso de Juegos en Red Y OtrosDocument1 paginăConcurso de Juegos en Red Y OtrosJuanMartinÎncă nu există evaluări
- Horarios 2019 2Document9 paginiHorarios 2019 2JuanMartinÎncă nu există evaluări
- AD Calculo Metodo Punto Por PuntoDocument6 paginiAD Calculo Metodo Punto Por PuntodoggymessiÎncă nu există evaluări
- Concurso de Juegos en Red Y OtrosDocument1 paginăConcurso de Juegos en Red Y OtrosJuanMartinÎncă nu există evaluări
- Batalla de AyacuchoDocument1 paginăBatalla de AyacuchoJuanMartinÎncă nu există evaluări
- Moyopampa PDFDocument163 paginiMoyopampa PDFgabichovilÎncă nu există evaluări
- Primer Laboratorio de MotoresDocument26 paginiPrimer Laboratorio de MotoresJuanMartinÎncă nu există evaluări
- Laboratorio N 02 Flujo Interno IIDocument34 paginiLaboratorio N 02 Flujo Interno IIJuanMartinÎncă nu există evaluări
- BecaDocument1 paginăBecaJuanMartinÎncă nu există evaluări
- Examen Sustitutorio 2018 - 2Document7 paginiExamen Sustitutorio 2018 - 2JuanMartinÎncă nu există evaluări
- Examen Final MC589 2017Document2 paginiExamen Final MC589 2017JuanMartinÎncă nu există evaluări
- Examen Final Mc589 2017Document2 paginiExamen Final Mc589 2017JuanMartinÎncă nu există evaluări
- 1.2 TDR Servicio Extraccion Aceite Item 3Document28 pagini1.2 TDR Servicio Extraccion Aceite Item 3Wilfredo Guzman RamosÎncă nu există evaluări
- MerivaTechnology 2019Document17 paginiMerivaTechnology 2019SergioÎncă nu există evaluări
- Instituto Tecnológico de Nuevo Laredo "Con La Ciencia Por La Humanidad"Document44 paginiInstituto Tecnológico de Nuevo Laredo "Con La Ciencia Por La Humanidad"Jose SantosÎncă nu există evaluări
- Actividad 2 Generar Cadenas A Partir de Una Expresion RegularDocument3 paginiActividad 2 Generar Cadenas A Partir de Una Expresion RegularJonathan Lopez0% (1)
- BDD U1 A1 JoarDocument9 paginiBDD U1 A1 JoarJosé AngelesÎncă nu există evaluări
- Esquema Trabajo Monografico - UniDocument3 paginiEsquema Trabajo Monografico - UniMerly Lorena MendozaÎncă nu există evaluări
- Anexo 1. Presentación Pre Tarea Yony Alexander Guerrero SerranoDocument11 paginiAnexo 1. Presentación Pre Tarea Yony Alexander Guerrero Serranomaira alejandra rangelÎncă nu există evaluări
- Tarea Lenguajes de ProgramacionDocument9 paginiTarea Lenguajes de Programacionwilliams tananta ipushimaÎncă nu există evaluări
- Manual Esp PDFDocument181 paginiManual Esp PDFCeleynes RT100% (1)
- Notificaciones SIMODocument2 paginiNotificaciones SIMORaúl MuñozÎncă nu există evaluări
- ¿Cómo Redactar Una Buena Introducción - Blog de Redacción de La PUCPDocument3 pagini¿Cómo Redactar Una Buena Introducción - Blog de Redacción de La PUCPJuan Eduardo Sotelo Peña0% (1)
- Proyecto N-Trip 21-10-16Document105 paginiProyecto N-Trip 21-10-16carlosÎncă nu există evaluări
- REUNIÓN DE GESTION - 03 Enero 2023 Iris 6 Enero 2023Document3 paginiREUNIÓN DE GESTION - 03 Enero 2023 Iris 6 Enero 2023IrisÎncă nu există evaluări
- Contenidos Resultado de Aprendizaje 1Document26 paginiContenidos Resultado de Aprendizaje 1Manuel Fernandez VillegasÎncă nu există evaluări
- Temario Auxiliar AdministrativoDocument4 paginiTemario Auxiliar Administrativomanuelcozar750% (1)
- Plan Anual So3btDocument3 paginiPlan Anual So3btwebchacon7877100% (1)
- Sistemas de Archivo y Clasificación de Documentos ... - (SISTEMAS DE ARCHIVO Y CLASIFICACIÓN DE (... ) ) PDFDocument5 paginiSistemas de Archivo y Clasificación de Documentos ... - (SISTEMAS DE ARCHIVO Y CLASIFICACIÓN DE (... ) ) PDFJuliana VelasquezÎncă nu există evaluări
- Guía Rápida Del SDongleA-05 (WLAN-FE)Document4 paginiGuía Rápida Del SDongleA-05 (WLAN-FE)Walter NoriegaÎncă nu există evaluări
- Dosificación Calculo Diferencial 2024Document2 paginiDosificación Calculo Diferencial 2024MORENO TORRES LUIS MIGUELÎncă nu există evaluări
- Codigo RedDocument4 paginiCodigo RedDiego garcia baizabalÎncă nu există evaluări
- Polling - Miguel SalasDocument9 paginiPolling - Miguel SalasMiguel SalasÎncă nu există evaluări
- Definición Del Diagrama de Flujo de ProcesoDocument3 paginiDefinición Del Diagrama de Flujo de ProcesoFabianÎncă nu există evaluări
- Grupo PresupuestoDocument19 paginiGrupo PresupuestoErlinÎncă nu există evaluări
- Mapa Nia 315Document1 paginăMapa Nia 315Janelee CruzÎncă nu există evaluări
- Propuesta Mejoramiento Instalaciones Electricas CRISTOFER MENDOZA 31-07-2019Document44 paginiPropuesta Mejoramiento Instalaciones Electricas CRISTOFER MENDOZA 31-07-2019CENAIDA MENDOZAÎncă nu există evaluări
- TALLER Direccionamiento IPDocument2 paginiTALLER Direccionamiento IPBrayan TabaresÎncă nu există evaluări
- Confiabilidad de SoftwareDocument7 paginiConfiabilidad de Softwareimvo2100% (1)
- Datagramas UDP Y TCPDocument5 paginiDatagramas UDP Y TCPfabiangaliciaÎncă nu există evaluări