S-ar putea să vă placă și
- LR Mate 100 Ibm ManualDocument144 paginiLR Mate 100 Ibm ManualManuel GutierrezÎncă nu există evaluări
- 240-Bishop-Remote Control Handbook PDFDocument233 pagini240-Bishop-Remote Control Handbook PDFSantiago PatitucciÎncă nu există evaluări
- C ElectDocument469 paginiC ElectklemencicvinkoÎncă nu există evaluări
- Analysis Industrial Robot Arm With Matlab and RoboAnalyzerDocument6 paginiAnalysis Industrial Robot Arm With Matlab and RoboAnalyzerIjaems JournalÎncă nu există evaluări
- LAB Report 7Document18 paginiLAB Report 7razakhan5114Încă nu există evaluări
- Lab SessionsDocument14 paginiLab SessionshamzatariqmirzaÎncă nu există evaluări
- Lab Report 6Document14 paginiLab Report 6razakhan5114Încă nu există evaluări
- SCARA Robot Lab ManualDocument19 paginiSCARA Robot Lab ManualDaniaÎncă nu există evaluări
- C InstalDocument170 paginiC InstalklemencicvinkoÎncă nu există evaluări
- WDM Lab Pe Aristo RobotDocument8 paginiWDM Lab Pe Aristo Robotfkmal28569Încă nu există evaluări
- C Controller Ops and Programming PDFDocument564 paginiC Controller Ops and Programming PDFdilipÎncă nu există evaluări
- Module 11: Example Study of Robots Lecture 39: PUMA Robots-A Case Study ObjectivesDocument9 paginiModule 11: Example Study of Robots Lecture 39: PUMA Robots-A Case Study ObjectivesNkugwa Mark WilliamÎncă nu există evaluări
- Design Implementation and Control of A H PDFDocument11 paginiDesign Implementation and Control of A H PDFNikhil HasabiÎncă nu există evaluări
- LAB 2-AngeladaDocument20 paginiLAB 2-AngeladaAlehamarie AngeladaÎncă nu există evaluări
- Practical Session 3: Inverse Dynamics: Arturo Gil AparicioDocument15 paginiPractical Session 3: Inverse Dynamics: Arturo Gil AparicioJpablo MartinezÎncă nu există evaluări
- 2016-09-19 RMHV2.1 PLC Offline Control User ManualDocument75 pagini2016-09-19 RMHV2.1 PLC Offline Control User ManualjonÎncă nu există evaluări
- Exp 9Document9 paginiExp 920R211 - D L SHRIVARSHINIÎncă nu există evaluări
- Position Control of 3-DOF Articulated Robot Arm Using PID ControllerDocument7 paginiPosition Control of 3-DOF Articulated Robot Arm Using PID ControllerJoker JkÎncă nu există evaluări
- Servo MotorsDocument8 paginiServo MotorsFairos ZakariahÎncă nu există evaluări
- RoboticDocument12 paginiRoboticGs Su100% (2)
- C Cont Electrical Mant.Document633 paginiC Cont Electrical Mant.John NekdoÎncă nu există evaluări
- I K S 6 D F S M: Nverse Inematic Olution of A O Erial AnipulatorDocument4 paginiI K S 6 D F S M: Nverse Inematic Olution of A O Erial AnipulatorAbenezer bediluÎncă nu există evaluări
- 340 ADocument121 pagini340 Aredoctober24Încă nu există evaluări
- SIM 08 Mill 5 AX: Siemens PLM SoftwareDocument7 paginiSIM 08 Mill 5 AX: Siemens PLM SoftwareMario MTÎncă nu există evaluări
- Microcontroller Based Robotic ArmDocument5 paginiMicrocontroller Based Robotic Armনূর হোসেন সৌরভ0% (1)
- Robotics QuestionsDocument3 paginiRobotics Questionsneerajbhayal3456Încă nu există evaluări
- Industrial Robotics-Unit 1Document34 paginiIndustrial Robotics-Unit 1tamilselvan nÎncă nu există evaluări
- Automation of Die Cutting MachineDocument34 paginiAutomation of Die Cutting Machinesyed ebadÎncă nu există evaluări
- C EpopsDocument695 paginiC EpopsTom DavisonÎncă nu există evaluări
- Harshit Robotics 10Document13 paginiHarshit Robotics 10harshitkargathara21Încă nu există evaluări
- Cooperative Motion For Arc WeldingDocument9 paginiCooperative Motion For Arc WeldingSeba O.Încă nu există evaluări
- Project Report On Robotic ArmDocument8 paginiProject Report On Robotic Armpramo_dassÎncă nu există evaluări
- YK-X/XH Series: Yamaha Scara RobotDocument370 paginiYK-X/XH Series: Yamaha Scara RobotDavid MurilloÎncă nu există evaluări
- Lathe Serial Servo Turret With Lio-Shing Turret - Development Manual (ROT Component)Document14 paginiLathe Serial Servo Turret With Lio-Shing Turret - Development Manual (ROT Component)charlechenÎncă nu există evaluări
- Introduction To ProductDocument18 paginiIntroduction To ProductYokuhoÎncă nu există evaluări
- 5 Axis Arm Robot TrainerDocument399 pagini5 Axis Arm Robot TrainerTINDER USERÎncă nu există evaluări
- Self Balancing RobotDocument30 paginiSelf Balancing RobotRahul Chauhan100% (1)
- Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontroller BoardDocument3 paginiDesign and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontroller BoardAneetaÎncă nu există evaluări
- PLC-controlled Stepper Motor Drive For NC PositionDocument10 paginiPLC-controlled Stepper Motor Drive For NC PositiondeoarshiÎncă nu există evaluări
- Robotics HandoutsDocument50 paginiRobotics Handoutssrivel12Încă nu există evaluări
- Kinematics, Dynamics and Evaluation of Energy Consumption For ABB IRB-140 Serial Robots in The Tracking of A PathDocument11 paginiKinematics, Dynamics and Evaluation of Energy Consumption For ABB IRB-140 Serial Robots in The Tracking of A PathAHMED ghribiÎncă nu există evaluări
- Payal Group Project Report-1Document9 paginiPayal Group Project Report-1daspayal378Încă nu există evaluări
- Ipe 419 Cim May 2022Document134 paginiIpe 419 Cim May 2022Indranil NiloyÎncă nu există evaluări
- How Do Servo Motors Work: This Little Motor Is High in Efficiency and PowerDocument8 paginiHow Do Servo Motors Work: This Little Motor Is High in Efficiency and PowerSubham GhoshÎncă nu există evaluări
- Image Processing of Sidescan SonarDocument7 paginiImage Processing of Sidescan SonarAlex NicksonÎncă nu există evaluări
- YK1200X 400 RCX340-4: Standard Type: Large TypeDocument1 paginăYK1200X 400 RCX340-4: Standard Type: Large TypeJuan David Valderrama ArtunduagaÎncă nu există evaluări
- 2092-At001 - En-P Ab Simple Motion Control PLC BasedDocument5 pagini2092-At001 - En-P Ab Simple Motion Control PLC BasedCristopher EntenaÎncă nu există evaluări
- AE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotDocument5 paginiAE832: Introduction To Robotics Lab: Round 2 Experiments Experiment 4: MTAB Aristo Robot Subject: Batch 8, MTAB Aristo RobotPravallika YadavÎncă nu există evaluări
- Scorbot Er 4uDocument12 paginiScorbot Er 4uYogeshSinghLatherÎncă nu există evaluări
- The CNC h4 SystemDocument8 paginiThe CNC h4 SystemRobert GiangÎncă nu există evaluări
- AN00226-Rotary Cutter Rev D ENDocument9 paginiAN00226-Rotary Cutter Rev D ENAdi FirmansyahÎncă nu există evaluări
- Robotic ArmDocument6 paginiRobotic ArmMallikarjun RaoÎncă nu există evaluări
- Digital Position Control For Analog Servos: Sven Behnke and Michael SchreiberDocument5 paginiDigital Position Control For Analog Servos: Sven Behnke and Michael SchreiberJavier Jair Trejo GarcíaÎncă nu există evaluări
- Module 3: Actuators For Robots Lecture 7: Actuators For Robots-Part I ObjectivesDocument7 paginiModule 3: Actuators For Robots Lecture 7: Actuators For Robots-Part I ObjectivesPriyadarshini SahooÎncă nu există evaluări
- Position Control of 6DOF's Manipulator Robot by Haider Hashim - PPTDocument24 paginiPosition Control of 6DOF's Manipulator Robot by Haider Hashim - PPTHaiderÎncă nu există evaluări
- Bluetooth Controlled Arduino Based Robotic Arm: Srija Dasgupta Avirup Ghosh Debraj ChatterjeeDocument6 paginiBluetooth Controlled Arduino Based Robotic Arm: Srija Dasgupta Avirup Ghosh Debraj ChatterjeeKarneshwar SannamaniÎncă nu există evaluări
- University of Kirkuk College of Engineering Mechanical DepartmentDocument6 paginiUniversity of Kirkuk College of Engineering Mechanical Departmentعبدالمؤمن خالد محمود100% (1)
- Lab 3 RoboticsDocument35 paginiLab 3 RoboticsWafiÎncă nu există evaluări
- Poor Mans Bi Ped Robot Controller Using RP2040 andDocument30 paginiPoor Mans Bi Ped Robot Controller Using RP2040 anddorivolosÎncă nu există evaluări
- University of The Punjab: Second Prof. 1 A / 2016 Roll No.Document2 paginiUniversity of The Punjab: Second Prof. 1 A / 2016 Roll No.Faria KhanÎncă nu există evaluări
- University of The PunjabDocument1 paginăUniversity of The PunjabFaria KhanÎncă nu există evaluări
- University of The PunjabDocument2 paginiUniversity of The PunjabFaria KhanÎncă nu există evaluări
- Lab Session # 07 Objective:: Generate A Matlab Code of Position, Velocity and Accelertion For Slider Crank MechanismDocument2 paginiLab Session # 07 Objective:: Generate A Matlab Code of Position, Velocity and Accelertion For Slider Crank MechanismFaria KhanÎncă nu există evaluări
- Projection of Solids ProblemsDocument31 paginiProjection of Solids ProblemsFaria KhanÎncă nu există evaluări
- Is PresentationDocument15 paginiIs PresentationFaria KhanÎncă nu există evaluări
- 0) Uv Weathering Test Method Cabot PDFDocument12 pagini0) Uv Weathering Test Method Cabot PDFarthurÎncă nu există evaluări
- UNV IPC2122CR3-PF40 (60) - A 2MP Mini Fixed Bullet Network Camera V1.0Document3 paginiUNV IPC2122CR3-PF40 (60) - A 2MP Mini Fixed Bullet Network Camera V1.0delly murtiÎncă nu există evaluări
- 207625Document17 pagini207625Jorge Ivan Guillen AmadoÎncă nu există evaluări
- Introduction To Infrared Spectroscopy-CLASSDocument18 paginiIntroduction To Infrared Spectroscopy-CLASSDr_GSÎncă nu există evaluări
- Smart Surveillance System Using PIR Sensor Network and GSM: M. Sathishkumar, S.RajiniDocument5 paginiSmart Surveillance System Using PIR Sensor Network and GSM: M. Sathishkumar, S.RajiniShashank GuptaÎncă nu există evaluări
- STARNADocument28 paginiSTARNArrivas17Încă nu există evaluări
- LEANN 75RC BrochureDocument2 paginiLEANN 75RC BrochureSenso OpticsÎncă nu există evaluări
- Methods For Continuous Emission Gas MonitoringDocument56 paginiMethods For Continuous Emission Gas Monitoringmuralikrishnagb6717Încă nu există evaluări
- Flame DetectorDocument93 paginiFlame DetectorFireProtectionEÎncă nu există evaluări
- CONTRINEX Safety Light CurtainsDocument23 paginiCONTRINEX Safety Light CurtainsMarcos AldrovandiÎncă nu există evaluări
- The Language of LightDocument27 paginiThe Language of LightmradojcinÎncă nu există evaluări
- K R I T I L E N® Masterbatches: Additives Technical InformationDocument10 paginiK R I T I L E N® Masterbatches: Additives Technical InformationAnas AbdoÎncă nu există evaluări
- DH Hac HDBW1200R VF PDFDocument3 paginiDH Hac HDBW1200R VF PDFAbdur Rouf BhuyianÎncă nu există evaluări
- FlameGard 5 UVIR Data Sheet - EN PDFDocument2 paginiFlameGard 5 UVIR Data Sheet - EN PDFwhauckÎncă nu există evaluări
- D 1619 - 99 - Rde2mtktukveDocument4 paginiD 1619 - 99 - Rde2mtktukveDr. Ahmed Abdel-HakimÎncă nu există evaluări
- Diamond Security System in Museum: Mini Project ReportDocument10 paginiDiamond Security System in Museum: Mini Project ReportChemudupati SunilÎncă nu există evaluări
- Seminar Report VKBDocument23 paginiSeminar Report VKBArvind MehraÎncă nu există evaluări
- A Brief Guide To The European Standards For Eye Protection - EN166Document2 paginiA Brief Guide To The European Standards For Eye Protection - EN166Every Thing100% (1)
- Emerging Biomedical Sensing Technologies and Their ApplicationsDocument16 paginiEmerging Biomedical Sensing Technologies and Their Applicationsyosua tambunanÎncă nu există evaluări
- Applications of IR & UV - Vis SpectrosDocument20 paginiApplications of IR & UV - Vis SpectrosMuhammad TaqiÎncă nu există evaluări
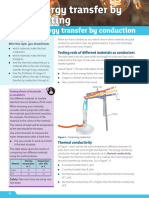
- 2.1 Energy Transfer by Conduction: Learning ObjectivesDocument12 pagini2.1 Energy Transfer by Conduction: Learning Objectivesjollanxavier9Încă nu există evaluări
- Carbonization and Demineralization of Coals: A Study by Means of FT-IR SpectrosDocument12 paginiCarbonization and Demineralization of Coals: A Study by Means of FT-IR SpectrosLuismi Suarez LopezÎncă nu există evaluări
- Insight Technology Incorporated an-PAQ-4C Infrared Aiming LightDocument2 paginiInsight Technology Incorporated an-PAQ-4C Infrared Aiming LightArmySGT100% (1)
- The EyeWriterDocument27 paginiThe EyeWriterPatrick LeMieuxÎncă nu există evaluări
- Rebellion Gas Cloud ImagingDocument3 paginiRebellion Gas Cloud ImagingAdel AdhiganaÎncă nu există evaluări
- ME HoneywellVideoSystems PDFDocument157 paginiME HoneywellVideoSystems PDFSteven HungÎncă nu există evaluări
- Review of Recent Machine-Vision Technologies in AgricultureDocument5 paginiReview of Recent Machine-Vision Technologies in AgricultureMekaTronÎncă nu există evaluări
- The Study of Hydrogen Bonding and PP InteractionsDocument9 paginiThe Study of Hydrogen Bonding and PP InteractionsINGRID MIRANDAÎncă nu există evaluări
- MelafindDocument9 paginiMelafinddiiinnaliinnnÎncă nu există evaluări