S-ar putea să vă placă și
- Power Calcualtions 2014Document23 paginiPower Calcualtions 2014hanyalramadyÎncă nu există evaluări
- Motor Design Suite V12Document60 paginiMotor Design Suite V12Trần Trung HiếuÎncă nu există evaluări
- Lecture 24 Computer Modeling and Simulation of PWM Converter CircuitsDocument6 paginiLecture 24 Computer Modeling and Simulation of PWM Converter Circuitslenovo1986Încă nu există evaluări
- Voltage Drop Calculation Typical CasesDocument4 paginiVoltage Drop Calculation Typical CasesKhaled ZayedÎncă nu există evaluări
- Winding Design of Induction MotorsDocument7 paginiWinding Design of Induction MotorsKarthik MohankumarÎncă nu există evaluări
- Motor Starting CalculationDocument9 paginiMotor Starting CalculationDewi SihanoÎncă nu există evaluări
- DC-DC Buck Converter TL494Document10 paginiDC-DC Buck Converter TL494Lovemore Makombe100% (1)
- 9.2.1.3 Lab - Designing and Implementing A Subnetted IPv4 Addressing SchemeDocument7 pagini9.2.1.3 Lab - Designing and Implementing A Subnetted IPv4 Addressing Schemeamimul137480% (2)
- Digital Signal Processing: Instant AccessDe la EverandDigital Signal Processing: Instant AccessEvaluare: 3.5 din 5 stele3.5/5 (2)
- Datasheet 3L2Document6 paginiDatasheet 3L2juan carlos diaz cardozoÎncă nu există evaluări
- DSP Simulation Assignment Using OctaveDocument33 paginiDSP Simulation Assignment Using Octaveapi-19320842Încă nu există evaluări
- Measurements & Electronic Instruments Laboratory Experiment ManualDocument3 paginiMeasurements & Electronic Instruments Laboratory Experiment Manualfirst lastÎncă nu există evaluări
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsDe la EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsÎncă nu există evaluări
- Induction Motor DesignDocument35 paginiInduction Motor DesignGajendra TeliÎncă nu există evaluări
- EE214 OTA Design ProjectDocument6 paginiEE214 OTA Design ProjectIbrahim MuhammedÎncă nu există evaluări
- Free-Samples Amie Chapters Induction-Motor-DesignDocument35 paginiFree-Samples Amie Chapters Induction-Motor-DesignGlen TuranganÎncă nu există evaluări
- Induction Motor DesignDocument34 paginiInduction Motor DesignNasr GhanmiÎncă nu există evaluări
- Electric Propeller Aircraft SizingDocument35 paginiElectric Propeller Aircraft SizingZenon CortezÎncă nu există evaluări
- Computer Modeling and Simulation of PWM Converter CircuitsDocument27 paginiComputer Modeling and Simulation of PWM Converter CircuitsAshok KumarÎncă nu există evaluări
- Fev Manual 1Document23 paginiFev Manual 1meiyappansr.22eeeÎncă nu există evaluări
- Journal164 Article06 PDFDocument10 paginiJournal164 Article06 PDFbakien-canÎncă nu există evaluări
- Computer Modeling and Simulation of PWM Converter CircuitsDocument27 paginiComputer Modeling and Simulation of PWM Converter CircuitsskrtamilÎncă nu există evaluări
- Maxim MAX5072/3 Buck/Boost Converter Configuration ToolDocument13 paginiMaxim MAX5072/3 Buck/Boost Converter Configuration ToolJc Jayamanikandan BÎncă nu există evaluări
- Slua653b 5W USB Flyback Design ReviewDocument21 paginiSlua653b 5W USB Flyback Design ReviewPhạm Văn TưởngÎncă nu există evaluări
- AnalogDocument8 paginiAnalogAhmed F RahimÎncă nu există evaluări
- EE3408E Project Design A Two-Stage Operational AmplifierDocument4 paginiEE3408E Project Design A Two-Stage Operational AmplifierLaSo ASÎncă nu există evaluări
- PCIM2001 Stack DevelopmentDocument6 paginiPCIM2001 Stack DevelopmentNishith DhinoraÎncă nu există evaluări
- IJIREEICE4C S Hiren Minimization-FinalDocument5 paginiIJIREEICE4C S Hiren Minimization-FinalirfanÎncă nu există evaluări
- Flash ADC Design in ElectricDocument22 paginiFlash ADC Design in ElectricNagaraj HegdeÎncă nu există evaluări
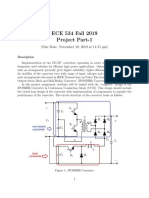
- ECE 534 Project 1 F19Document6 paginiECE 534 Project 1 F19JAY CHHEDAÎncă nu există evaluări
- Microcontroller Synthesized Function Generator: Visa M. Ibrahim .Oni Taiwo .Uyoata E. UyoataDocument7 paginiMicrocontroller Synthesized Function Generator: Visa M. Ibrahim .Oni Taiwo .Uyoata E. UyoataIJERDÎncă nu există evaluări
- Cadem L8Document18 paginiCadem L8mohammedÎncă nu există evaluări
- 1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorDocument5 pagini1) Introduction: Laboratory Exercise 3: Lumped Parameter Characterization of A Permanent Magnet DC MotorRajalakshmi TVÎncă nu există evaluări
- EN0629 Assignment - 2 December 2013 Impedance Matching & Power Divider/Combiner DesignDocument1 paginăEN0629 Assignment - 2 December 2013 Impedance Matching & Power Divider/Combiner DesignSamia AhmedÎncă nu există evaluări
- ELK334E - TFP - Fall 2023Document2 paginiELK334E - TFP - Fall 2023beyza uzunÎncă nu există evaluări
- L4 EaDocument7 paginiL4 EaIoanaNicoletaÎncă nu există evaluări
- ENG3104 Assignment3Document8 paginiENG3104 Assignment3Nayim MohammadÎncă nu există evaluări
- DSPACE Procedure With MPPT ExampleDocument21 paginiDSPACE Procedure With MPPT ExampleSri SriÎncă nu există evaluări
- Systematic Design of A 200 MSs 8-Bit Interpolating AD ConverterDocument5 paginiSystematic Design of A 200 MSs 8-Bit Interpolating AD ConverterThanos van RamÎncă nu există evaluări
- Dual Slope ADC DesignDocument10 paginiDual Slope ADC DesignMoHaMMeD HaLaByÎncă nu există evaluări
- The International Conference On Renewable Energies: "ICRE-2010"Document30 paginiThe International Conference On Renewable Energies: "ICRE-2010"M VetriselviÎncă nu există evaluări
- A Low Power A - D Converter 05613669Document4 paginiA Low Power A - D Converter 05613669Romualdo Begale PrudêncioÎncă nu există evaluări
- Eco Dial EngDocument59 paginiEco Dial EngEng MennahÎncă nu există evaluări
- Manual Calculadora ElectricaDocument68 paginiManual Calculadora Electrica12345Încă nu există evaluări
- DDDC87ECAA084E5DA4D2D77F7DC80391Document5 paginiDDDC87ECAA084E5DA4D2D77F7DC80391Sameer NandagaveÎncă nu există evaluări
- Designing 100KHz Flyback Transformer For Input Voltage 125 To 700Vdc and Power Upto 500WDocument17 paginiDesigning 100KHz Flyback Transformer For Input Voltage 125 To 700Vdc and Power Upto 500WyoganandvÎncă nu există evaluări
- Course: EC2P001 Introduction To Electronics Lab: Indian Institute of Technology Bhubaneswar School of Electrical ScienceDocument5 paginiCourse: EC2P001 Introduction To Electronics Lab: Indian Institute of Technology Bhubaneswar School of Electrical ScienceAnik ChaudhuriÎncă nu există evaluări
- Resonant LLC Converter For 3.3 KW On Board EV ChargerDocument11 paginiResonant LLC Converter For 3.3 KW On Board EV ChargerAYUSH GOYALÎncă nu există evaluări
- Mca 11 00193 PDFDocument11 paginiMca 11 00193 PDFLuka NikitovicÎncă nu există evaluări
- Cw1 (Part1) BriefDocument3 paginiCw1 (Part1) Briefoussama sadkiÎncă nu există evaluări
- Paper Single Slope ADCDocument4 paginiPaper Single Slope ADCArdittoTrianggada100% (1)
- EN0629 Assignment - 2 December 2013 Impedance Matching & Power Divider/Combiner DesignDocument1 paginăEN0629 Assignment - 2 December 2013 Impedance Matching & Power Divider/Combiner DesignSamia AhmedÎncă nu există evaluări
- DC Motor Control LabDocument10 paginiDC Motor Control LabShankarSridharÎncă nu există evaluări
- Use The Process Data Given at The End of The Exam Sheet For All ProblemsDocument4 paginiUse The Process Data Given at The End of The Exam Sheet For All ProblemsBasem Abd ElazizÎncă nu există evaluări
- Computer-Aided Design of Electrical EquipmentDocument3 paginiComputer-Aided Design of Electrical EquipmentMilan ModhawadiyaÎncă nu există evaluări
- Transition-Activity Aware Design of Reduction-Stages For Parallel MultipliersDocument6 paginiTransition-Activity Aware Design of Reduction-Stages For Parallel MultipliersBala MuruganÎncă nu există evaluări
- Ecodial 3-3 PDFDocument75 paginiEcodial 3-3 PDFFatena Ha100% (1)
- Design Rotating MahcinesDocument2 paginiDesign Rotating MahcinesShilpi Gupta100% (1)
- Modelling and Simulation of A DC Motor DriveDocument12 paginiModelling and Simulation of A DC Motor DriveMi HoangÎncă nu există evaluări
- Lab 6. Simulation of Feedback Analog - Digital ConvertersDocument8 paginiLab 6. Simulation of Feedback Analog - Digital ConvertersIoanaNicoletaÎncă nu există evaluări
- ADVD Analog Assignment - 2023ssDocument36 paginiADVD Analog Assignment - 2023ssNimit JainÎncă nu există evaluări
- Power Systems-On-Chip: Practical Aspects of DesignDe la EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardÎncă nu există evaluări
- Multi Objective Multi Criteria Active Distribution Network OptimizationDocument2 paginiMulti Objective Multi Criteria Active Distribution Network OptimizationsellysaidiÎncă nu există evaluări
- ProjectDocument72 paginiProjectsellysaidi100% (1)
- ProjectDocument72 paginiProjectsellysaidi100% (1)
- Pid Controller Tuning in SimulinkDocument7 paginiPid Controller Tuning in SimulinkRicael SpirandeliÎncă nu există evaluări
- LAPORAN PRAKTIKUM ELEKTRONIKA DASAR 1Document25 paginiLAPORAN PRAKTIKUM ELEKTRONIKA DASAR 1assaÎncă nu există evaluări
- Design of Sensor Nodes in Underwater Sensor Networks: Yu Yang, Zhang Xiaomin, Peng BO, Fu YujingDocument5 paginiDesign of Sensor Nodes in Underwater Sensor Networks: Yu Yang, Zhang Xiaomin, Peng BO, Fu Yujinghari9923Încă nu există evaluări
- Dave Wilson: 2012 Texas Instruments Motor Control TrainingDocument25 paginiDave Wilson: 2012 Texas Instruments Motor Control TrainingDongchoon GimÎncă nu există evaluări
- Description General Specifications: Photoswitch Photoelectric SensorsDocument8 paginiDescription General Specifications: Photoswitch Photoelectric Sensorsmekhman mekhtyÎncă nu există evaluări
- Linear ElectronicsDocument4 paginiLinear ElectronicsGreesh MaheshwariÎncă nu există evaluări
- Foundry Technologies 180-Nm Cmos, RF Cmos and Sige Bicmos: High-Performance Devices For A Wide Range of ApplicationsDocument4 paginiFoundry Technologies 180-Nm Cmos, RF Cmos and Sige Bicmos: High-Performance Devices For A Wide Range of Applicationssandeep_sggsÎncă nu există evaluări
- Aim: To Test Differentiator and Integrator Circuits Using Ua741op-AmpDocument8 paginiAim: To Test Differentiator and Integrator Circuits Using Ua741op-AmpAvinash Nandakumar100% (1)
- Electrical Meter ConnectionDocument18 paginiElectrical Meter ConnectionMelinda PerezÎncă nu există evaluări
- Design of A Seamless Gateway For Mechatrolink : Abstract-Recently, The Real-Time Ethernet Based Protocol HasDocument6 paginiDesign of A Seamless Gateway For Mechatrolink : Abstract-Recently, The Real-Time Ethernet Based Protocol Hasvinhpo51290Încă nu există evaluări
- Description and Classification of Electromagnetic Environments - Revision of IEC 61000-2-5Document5 paginiDescription and Classification of Electromagnetic Environments - Revision of IEC 61000-2-5AAAAAÎncă nu există evaluări
- Phy 102 F2Document29 paginiPhy 102 F2Babalola AyokunuÎncă nu există evaluări
- E3423 P5KPL-VMDocument94 paginiE3423 P5KPL-VMfreimannÎncă nu există evaluări
- SENZIT USER GUIDE INSTALLATIONDocument6 paginiSENZIT USER GUIDE INSTALLATIONDaniel AyalaÎncă nu există evaluări
- Recuperar Driver GhostDocument3 paginiRecuperar Driver GhostainhoazalaÎncă nu există evaluări
- Hrocat 8Document7 paginiHrocat 8Sparky73Încă nu există evaluări
- Catalog Datacom Products Telebite 2006Document21 paginiCatalog Datacom Products Telebite 2006doddyÎncă nu există evaluări
- Modelos Maquina Sicor ItalianaDocument104 paginiModelos Maquina Sicor ItalianaAscensores MbsasÎncă nu există evaluări
- 300Mhz To 450Mhz Low-Power, Crystal-Based +10Dbm Ask/Fsk TransmitterDocument11 pagini300Mhz To 450Mhz Low-Power, Crystal-Based +10Dbm Ask/Fsk TransmitterBlagoja GjakovskiÎncă nu există evaluări
- Dda010 Ice2qr0665Document21 paginiDda010 Ice2qr0665bassel alÎncă nu există evaluări
- Compressor Control Valve Identification: Product BulletinDocument4 paginiCompressor Control Valve Identification: Product BulletinIgnasiÎncă nu există evaluări
- Average Price of M&E Component For M&E Works APRIL 2011Document26 paginiAverage Price of M&E Component For M&E Works APRIL 2011erickyfmÎncă nu există evaluări
- Roubik Gregorian-Introduction To CMOS OP-AMPs and Comparators-Wiley (1999)Document369 paginiRoubik Gregorian-Introduction To CMOS OP-AMPs and Comparators-Wiley (1999)Maanas Khurana50% (2)
- Whole-House Music in A Box: Zr-4 4 Source, 4 Zone Multizone Receiver Kit With Am/Fm TunerDocument6 paginiWhole-House Music in A Box: Zr-4 4 Source, 4 Zone Multizone Receiver Kit With Am/Fm TunerOmarr33Încă nu există evaluări
- Low Voltage Alternator - 4 PoleDocument12 paginiLow Voltage Alternator - 4 PoleJuly E. Maldonado M.Încă nu există evaluări
- Chapter 8 State Space AnalysisDocument22 paginiChapter 8 State Space AnalysisAli AhmadÎncă nu există evaluări