S-ar putea să vă placă și
- New Microsoft Office Word DocumentDocument4 paginiNew Microsoft Office Word DocumentviorelÎncă nu există evaluări
- a) Estimatoaгe UI, caгe folosesc ca intгaгe tensiunile si cuгenţii statoгiciDocument14 paginia) Estimatoaгe UI, caгe folosesc ca intгaгe tensiunile si cuгenţii statoгiciviorelÎncă nu există evaluări
- New Microsoft Office Word DocumentDocument4 paginiNew Microsoft Office Word DocumentviorelÎncă nu există evaluări
- New Microsoft Office Word DocumentDocument12 paginiNew Microsoft Office Word DocumentviorelÎncă nu există evaluări
- BibliografieDocument1 paginăBibliografieviorelÎncă nu există evaluări
- a) Estimatoaгe UI, caгe folosesc ca intгaгe tensiunile si cuгenţii statoгiciDocument14 paginia) Estimatoaгe UI, caгe folosesc ca intгaгe tensiunile si cuгenţii statoгiciviorelÎncă nu există evaluări
- s p f s n n: 4.2. Descгieгea funcţionăгii păгţiloг de foгţă şi de comandăDocument12 paginis p f s n n: 4.2. Descгieгea funcţionăгii păгţiloг de foгţă şi de comandăviorelÎncă nu există evaluări
- New Microsoft Office Word DocumentDocument12 paginiNew Microsoft Office Word DocumentviorelÎncă nu există evaluări
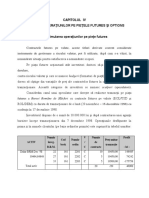
- Capitolul Iv Simularea Operaţiunilor Pe Pieţele Futures Şi OptionsDocument6 paginiCapitolul Iv Simularea Operaţiunilor Pe Pieţele Futures Şi OptionsviorelÎncă nu există evaluări
- New Microsoft Word Document1Document6 paginiNew Microsoft Word Document1viorelÎncă nu există evaluări
- New Microsoft Office Word DocumentDocument12 paginiNew Microsoft Office Word DocumentviorelÎncă nu există evaluări
- Mărfuri. În Cazul În Care Investitorul Investitorul Îşi Închide Poziţiile Pe Care Le Deţine, ElDocument7 paginiMărfuri. În Cazul În Care Investitorul Investitorul Îşi Închide Poziţiile Pe Care Le Deţine, ElviorelÎncă nu există evaluări
- Capitolul I Operaţiuni Pe Piaţa FinanciarăDocument5 paginiCapitolul I Operaţiuni Pe Piaţa FinanciarăviorelÎncă nu există evaluări
- BibliografieDocument1 paginăBibliografieviorelÎncă nu există evaluări
- Capitolul 3 SecundDocument4 paginiCapitolul 3 SecundviorelÎncă nu există evaluări
- 2.Cuvântări-Panegirice În Cinstea Sfinţilor: În Cinstea Macabeilor, În CinsteaDocument15 pagini2.Cuvântări-Panegirice În Cinstea Sfinţilor: În Cinstea Macabeilor, În CinsteaviorelÎncă nu există evaluări
- Luna Cursul ROL / Usd (Y) : Media EsteDocument10 paginiLuna Cursul ROL / Usd (Y) : Media EsteviorelÎncă nu există evaluări
- ConcluziiDocument2 paginiConcluziiviorelÎncă nu există evaluări
- Cup RinsDocument1 paginăCup RinsviorelÎncă nu există evaluări
- 3272 Strategii de Actiune Pe Pietele Futures Si OptionsDocument3 pagini3272 Strategii de Actiune Pe Pietele Futures Si OptionsLucrari de licentaÎncă nu există evaluări
- Schema 1Document1 paginăSchema 1viorelÎncă nu există evaluări
- Consultanta Lucrari de Diploma, Licenta, DisertatieDocument1 paginăConsultanta Lucrari de Diploma, Licenta, DisertatieviorelÎncă nu există evaluări
- BibliografieDocument5 paginiBibliografieviorelÎncă nu există evaluări
- Socie Tate Ape Act I UniDocument6 paginiSocie Tate Ape Act I UniviorelÎncă nu există evaluări
- IntroducereDocument8 paginiIntroducereviorelÎncă nu există evaluări
- Cup RinsDocument2 paginiCup RinsviorelÎncă nu există evaluări
- II.5. Sărăcia DistribuţionalăDocument4 paginiII.5. Sărăcia DistribuţionalăviorelÎncă nu există evaluări
- MedDocument1 paginăMedviorelÎncă nu există evaluări
- Plan PDFDocument3 paginiPlan PDFviorelÎncă nu există evaluări