S-ar putea să vă placă și
- Brimstone LineupsDocument13 paginiBrimstone LineupsluisÎncă nu există evaluări
- TOGAFDocument3 paginiTOGAFluisÎncă nu există evaluări
- Orden de Servicio Vs Orden de TrabajoDocument4 paginiOrden de Servicio Vs Orden de TrabajoluisÎncă nu există evaluări
- Consecuencias de La Rebelión de Túpac Amaru LLDocument3 paginiConsecuencias de La Rebelión de Túpac Amaru LLluis60% (5)
- CGUNODocument28 paginiCGUNOAndres ArceÎncă nu există evaluări
- Manual de Usuario SACDocument46 paginiManual de Usuario SACFatima100% (1)
- Introducción A La Arquitectura de Android y A La Programación de Aplicaciones Móviles - Simple AppinventorDocument9 paginiIntroducción A La Arquitectura de Android y A La Programación de Aplicaciones Móviles - Simple Appinventorjonnathan ferney pedrozaÎncă nu există evaluări
- Programacion Orientada Objetos - Deteccion de ErroresDocument2 paginiProgramacion Orientada Objetos - Deteccion de ErroresmrreloadedÎncă nu există evaluări
- FrA1l3 Brico Tiras Led PuertasDocument42 paginiFrA1l3 Brico Tiras Led PuertasJuan64Încă nu există evaluări
- Programacion de Comunicacion 2° A-B 2023Document17 paginiProgramacion de Comunicacion 2° A-B 2023Techy CruzÎncă nu există evaluări
- CP CPK en FarmaDocument3 paginiCP CPK en FarmaHugo Perez OlivaresÎncă nu există evaluări
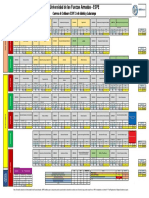
- Espe Software Malla Codificada 8 Niveles 202051Document1 paginăEspe Software Malla Codificada 8 Niveles 202051José NavasÎncă nu există evaluări
- Una Falsa Novia para Navidad Los Millonarios Machos Alpha 10 AvaDocument249 paginiUna Falsa Novia para Navidad Los Millonarios Machos Alpha 10 AvaEzmeralda JrzÎncă nu există evaluări
- La RoboticaDocument12 paginiLa RoboticaJessica Perez rivasÎncă nu există evaluări
- Principales Transacciones FICADocument3 paginiPrincipales Transacciones FICAbacevedo10Încă nu există evaluări
- Catalogo Lampara Examen CLED10 EspañolDocument5 paginiCatalogo Lampara Examen CLED10 EspañollalaÎncă nu există evaluări
- Examen: Gómez Del Campo Beltrán DamiánDocument5 paginiExamen: Gómez Del Campo Beltrán DamiánGómez del Campo Beltrán DamiánÎncă nu există evaluări
- Principios de Algoritmos Separata 11Document10 paginiPrincipios de Algoritmos Separata 11Daniel bot KÎncă nu există evaluări
- Material de Apoyo para Desarrollar Actividades (Excel)Document33 paginiMaterial de Apoyo para Desarrollar Actividades (Excel)Alma Cristina Gonzalez CabreraÎncă nu există evaluări
- Parrafos Comprension 3.0Document11 paginiParrafos Comprension 3.0Eduardo ChambergoÎncă nu există evaluări
- Convotherm Mini 6.06 Easy Touch + CampanaDocument1 paginăConvotherm Mini 6.06 Easy Touch + CampanakarlalmendraÎncă nu există evaluări
- Top Drive VFDDocument95 paginiTop Drive VFDArturo suzan arvizuÎncă nu există evaluări
- Presentacion0 FundamentosdeProgramacionParte1Document21 paginiPresentacion0 FundamentosdeProgramacionParte1Johanna Milagros Hurtado RodriguezÎncă nu există evaluări
- Reto-5 - 11 IIDocument3 paginiReto-5 - 11 IINidia Gongora GalvisÎncă nu există evaluări
- Unidad I Mapa Mental Del Sistema de Informacion Gerencial SIG Geanny RamonesDocument1 paginăUnidad I Mapa Mental Del Sistema de Informacion Gerencial SIG Geanny RamonesMareliza SilvaÎncă nu există evaluări
- Trabajo Práctico 1Document6 paginiTrabajo Práctico 1MARCO GABRIEL MALDONADO GUTIERREZÎncă nu există evaluări
- Autocalificable 2Document5 paginiAutocalificable 2Stephany Briones86% (7)
- Política de Dispositivos MóvilesDocument6 paginiPolítica de Dispositivos MóvilesAleja LópezÎncă nu există evaluări
- Casos de Prueba - BancoDocument1 paginăCasos de Prueba - BancoFito CalamaroÎncă nu există evaluări
- Universidad Tecnológica de Puebla. Control Lógico Programable Manual de AsignaturaDocument162 paginiUniversidad Tecnológica de Puebla. Control Lógico Programable Manual de AsignaturaJ. S.Încă nu există evaluări
- Fase 3 - Integrar El Potencial de Las Comunicaciones Industriales AvanzadasDocument27 paginiFase 3 - Integrar El Potencial de Las Comunicaciones Industriales Avanzadasalexis pedrozaÎncă nu există evaluări
- Codigos de ErroresDocument5 paginiCodigos de Errorespeymber100% (1)
- Python Avanzado IDocument5 paginiPython Avanzado IEmma VazquezÎncă nu există evaluări
- Manual Maquina de Anestesia PDFDocument580 paginiManual Maquina de Anestesia PDFSERGIO ANDRES QUINTERO OSPINA100% (2)