S-ar putea să vă placă și
- GARCH Models: Structure, Statistical Inference and Financial ApplicationsDe la EverandGARCH Models: Structure, Statistical Inference and Financial ApplicationsEvaluare: 5 din 5 stele5/5 (1)
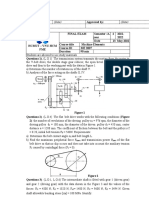
- Long 32 Ft. Datos: F C 3500 Psi F Ci 4500 Psi: Problema 2Document9 paginiLong 32 Ft. Datos: F C 3500 Psi F Ci 4500 Psi: Problema 2Yurielka RodriguezÎncă nu există evaluări
- VLF Radio Engineering: International Series of Monographs in Electromagnetic WavesDe la EverandVLF Radio Engineering: International Series of Monographs in Electromagnetic WavesÎncă nu există evaluări
- Makalah 4.19 EditedDocument22 paginiMakalah 4.19 EditedRana Rezeki Najeges100% (1)
- Irreducible Tensor Methods: An Introduction for ChemistsDe la EverandIrreducible Tensor Methods: An Introduction for ChemistsÎncă nu există evaluări
- ch11 SolmanDocument57 paginich11 Solmannbessman67% (3)
- Computer Processing of Remotely-Sensed Images: An IntroductionDe la EverandComputer Processing of Remotely-Sensed Images: An IntroductionÎncă nu există evaluări
- Me352 E2 Fa2016 SolDocument25 paginiMe352 E2 Fa2016 SolirqudratÎncă nu există evaluări
- 18s Cpe221 Sample Test1 SolutionDocument3 pagini18s Cpe221 Sample Test1 SolutionKyra LathonÎncă nu există evaluări
- P1103 ADocument3 paginiP1103 AspyÎncă nu există evaluări
- Example Design of A Yagi-Uda AntennaDocument9 paginiExample Design of A Yagi-Uda AntennaKiều DũngÎncă nu există evaluări
- Exam 1Document34 paginiExam 1rshnaelÎncă nu există evaluări
- Tugas Prinsip Rekayasa Dan IKDDocument5 paginiTugas Prinsip Rekayasa Dan IKDGalih RekaÎncă nu există evaluări
- Lab02 - Report - Nguyen Trung Dung - 20226030Document7 paginiLab02 - Report - Nguyen Trung Dung - 20226030trungdung6789a0Încă nu există evaluări
- Dynamic Force AnalysisDocument50 paginiDynamic Force AnalysisIASHA BILAL GIBRANÎncă nu există evaluări
- Basic Aerodynamics F18 Assignment 3Document45 paginiBasic Aerodynamics F18 Assignment 3Lucas SilveiraÎncă nu există evaluări
- ME 154 Fall 2021 Exam 2 SolutionsDocument3 paginiME 154 Fall 2021 Exam 2 SolutionsJonathan Olivares VarelaÎncă nu există evaluări
- F F2 TacpDocument11 paginiF F2 TacpRegina H ChÎncă nu există evaluări
- Design of Machinery - 5Th Ed. Solution Manual 11-43-1Document3 paginiDesign of Machinery - 5Th Ed. Solution Manual 11-43-1David SánchezÎncă nu există evaluări
- AE2022-2023 - Project Report (Abbas Ismail-Raed Awa - 230719 - 135653Document39 paginiAE2022-2023 - Project Report (Abbas Ismail-Raed Awa - 230719 - 135653hung kungÎncă nu există evaluări
- 29.08.21 - OSR - CO-SC - Jee - Adv - 2018 - P1 - GTA-26 (P-I) - KEY & SOLDocument14 pagini29.08.21 - OSR - CO-SC - Jee - Adv - 2018 - P1 - GTA-26 (P-I) - KEY & SOLkrishÎncă nu există evaluări
- Expansion Valves: General DescriptionDocument2 paginiExpansion Valves: General DescriptionCislandia PereiraÎncă nu există evaluări
- Chap003 ch3 Solution of Power Electronics by Daniel WDocument33 paginiChap003 ch3 Solution of Power Electronics by Daniel WMiiguel Angel LópezÎncă nu există evaluări
- Chem152 Lab 6Document6 paginiChem152 Lab 6api-277000361Încă nu există evaluări
- Pórtico Con Carga DistribuidaDocument14 paginiPórtico Con Carga DistribuidaVictor Polanco PalaciosÎncă nu există evaluări
- Generate Realistic Models For LED Current Versus Voltage: Do You Have An Idea For Design ForDocument6 paginiGenerate Realistic Models For LED Current Versus Voltage: Do You Have An Idea For Design Forjvs57Încă nu există evaluări
- A Design Technique For Faster Dadda Multiplier: B. Ramkumar, V. Sreedeep and Harish M Kittur, Member, IEEEDocument6 paginiA Design Technique For Faster Dadda Multiplier: B. Ramkumar, V. Sreedeep and Harish M Kittur, Member, IEEEPRAVEEN1640Încă nu există evaluări
- 3mom DBRDocument8 pagini3mom DBRAlysson KoraimaÎncă nu există evaluări
- HTPC Project 2Document26 paginiHTPC Project 2JephinSJohnÎncă nu există evaluări
- 31 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 4 Key&SolDocument16 pagini31 12 23 SR Star Co Scmodel A, B&C Jee Main GTM 4 Key&SolReddyÎncă nu există evaluări
- Vasudev Chanka - Radioactive Decay LabDocument6 paginiVasudev Chanka - Radioactive Decay LabvasuÎncă nu există evaluări
- 2 Conversion and Reactor SizingDocument39 pagini2 Conversion and Reactor SizingRonaldo Luis Guao BolañoÎncă nu există evaluări
- MICRO CHAP6 ACTS DRAFT Copy 1Document3 paginiMICRO CHAP6 ACTS DRAFT Copy 1Bhebz Erin MaeÎncă nu există evaluări
- CAPE Physics 2008 U2 P2 Rest of RegionDocument15 paginiCAPE Physics 2008 U2 P2 Rest of RegionhahaÎncă nu există evaluări
- Log Periodic Calculator by KM9ODocument14 paginiLog Periodic Calculator by KM9OSubhanjali Myneni100% (1)
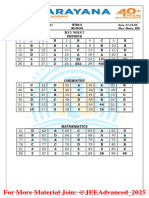
- Sri Chaitanya IIT Academy., India.: A Right Choice For The Real Aspirant ICON Central Office, Madhapur - HyderabadDocument15 paginiSri Chaitanya IIT Academy., India.: A Right Choice For The Real Aspirant ICON Central Office, Madhapur - HyderabadAditya Raj SinhaÎncă nu există evaluări
- X L W C: Motor Shaft CapacitiveDocument14 paginiX L W C: Motor Shaft CapacitiveMuhamadFirdaus0% (1)
- February 5 Homework Solutions: Mechanical Engineering 390 Fluid MechanicsDocument7 paginiFebruary 5 Homework Solutions: Mechanical Engineering 390 Fluid MechanicsAnyeloMurilloÎncă nu există evaluări
- Assignment SimulasiDocument38 paginiAssignment SimulasiMaximus DacasusÎncă nu există evaluări
- 18f Cpe221 Test1 SolutionDocument4 pagini18f Cpe221 Test1 SolutionKyra LathonÎncă nu există evaluări
- CABO Activity2 CHM172.1 H78Document8 paginiCABO Activity2 CHM172.1 H78Myra Jane CaboÎncă nu există evaluări
- Hints and Solutions:: (Chemistry)Document8 paginiHints and Solutions:: (Chemistry)Sourabh RajÎncă nu există evaluări
- 3.2 Row Reductions and Echelon FormDocument11 pagini3.2 Row Reductions and Echelon FormJoelar OndaÎncă nu există evaluări
- 11.01.24 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-13 (N) - KEY & SOLDocument16 pagini11.01.24 - SR - STAR CO-SC (MODEL-A, B&C) - Jee - Main - GTM-13 (N) - KEY & SOLumap1706Încă nu există evaluări
- Numerical Methods Machine Problem 1Document11 paginiNumerical Methods Machine Problem 1Maria Charlene Caraos TapiaÎncă nu există evaluări
- Lab Report-1Document7 paginiLab Report-1Kazi Ershadul IslamÎncă nu există evaluări
- 16 70Document55 pagini16 70beast manÎncă nu există evaluări
- EY HeetDocument24 paginiEY HeetRitabrata DindaÎncă nu există evaluări
- Model of The Initial Stiffness in Extended End-Plate ConnectionDocument5 paginiModel of The Initial Stiffness in Extended End-Plate ConnectionmdkmlÎncă nu există evaluări
- Rutishauser Eigen 29 Matrix OrderDocument17 paginiRutishauser Eigen 29 Matrix Orderjuan carlos molano toroÎncă nu există evaluări
- HW 07Document8 paginiHW 07Aeyrul KhairulÎncă nu există evaluări
- Aiits 1820 PT II Jeea Paper 1 SolxiDocument10 paginiAiits 1820 PT II Jeea Paper 1 SolxiScribd nowÎncă nu există evaluări
- 10.1007@s00006 016 0698 2Document16 pagini10.1007@s00006 016 0698 2Uli Urio-LegoÎncă nu există evaluări
- D 4 Development of Beam EquationsDocument1 paginăD 4 Development of Beam EquationsAHMED SHAKERÎncă nu există evaluări
- Sol Ch6 Part1Document4 paginiSol Ch6 Part1Abdul Manan75% (4)
- mcs-12 2020-21 SellDocument38 paginimcs-12 2020-21 SellJugmendra Singh DalalÎncă nu există evaluări
- Me352 E1 Fa2009 SolDocument21 paginiMe352 E1 Fa2009 SolSteve KrodaÎncă nu există evaluări
- HK212Document7 paginiHK212Minh HuyÎncă nu există evaluări
- 12 06 22 SR.C IPL (Incoming) Jee Adv (2020 P1) WTA 03 Key & Sol'sDocument6 pagini12 06 22 SR.C IPL (Incoming) Jee Adv (2020 P1) WTA 03 Key & Sol'sVishal MÎncă nu există evaluări
- MAK316 - Theory of Machines Fall 2009-2010Document3 paginiMAK316 - Theory of Machines Fall 2009-2010Osman Dündar KaraÎncă nu există evaluări
- Bewertungsschema Und CCL V12 20181128Document7 paginiBewertungsschema Und CCL V12 20181128ankitÎncă nu există evaluări
- MSG® Centac® Centrifugal Compressor Replacement PartsDocument2 paginiMSG® Centac® Centrifugal Compressor Replacement PartsankitÎncă nu există evaluări
- Project 1Document25 paginiProject 1ankitÎncă nu există evaluări
- Project 1Document25 paginiProject 1ankitÎncă nu există evaluări
- Scanned by CamscannerDocument5 paginiScanned by CamscannerankitÎncă nu există evaluări
- 320+ in 30 Days: With The StrategyDocument16 pagini320+ in 30 Days: With The StrategyankitÎncă nu există evaluări
- How To Apply at TUHH General 2019 PDFDocument7 paginiHow To Apply at TUHH General 2019 PDFankitÎncă nu există evaluări
- Email EtiquetteDocument25 paginiEmail Etiquetteankit100% (3)
- HWSolutions PDFDocument42 paginiHWSolutions PDFJames AhnÎncă nu există evaluări
- Speaking TemplatesDocument26 paginiSpeaking TemplatesSher Khan100% (1)
- TOEFL Speaking RubricsDocument2 paginiTOEFL Speaking RubricsApoorv MahajanÎncă nu există evaluări
- 9 Atkinson CycleDocument3 pagini9 Atkinson CyclecaptainhassÎncă nu există evaluări
- B OFF D A D A D OFF B N C N N C OFF: 22 23 24 25 26 FRI SAT Sun Mon Tue Avinash Sandeep AnkitDocument5 paginiB OFF D A D A D OFF B N C N N C OFF: 22 23 24 25 26 FRI SAT Sun Mon Tue Avinash Sandeep AnkitankitÎncă nu există evaluări
- CVT Flyer PDFDocument2 paginiCVT Flyer PDFankitÎncă nu există evaluări
- PDF Print AuthDocument3 paginiPDF Print AuthankitÎncă nu există evaluări
- Regeneration Cooler Blower DrawingDocument1 paginăRegeneration Cooler Blower DrawingankitÎncă nu există evaluări
- DrawingDocument25 paginiDrawingankitÎncă nu există evaluări
- PDF Print AuthDocument3 paginiPDF Print AuthankitÎncă nu există evaluări
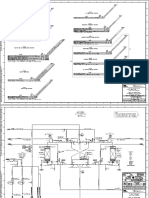
- Penex Revamp P&ids-Ms BlockDocument40 paginiPenex Revamp P&ids-Ms BlockankitÎncă nu există evaluări
- ME 11.industrial EngineeringDocument198 paginiME 11.industrial EngineeringHaren ParmarÎncă nu există evaluări
- ESE Reforms PublicityDocument11 paginiESE Reforms PublicityChirag PatelÎncă nu există evaluări
- 04 10 ALINT DatasheetDocument2 pagini04 10 ALINT DatasheetJoakim LangletÎncă nu există evaluări
- Nanomedicine Lecture 2007Document59 paginiNanomedicine Lecture 200778912071Încă nu există evaluări
- Generalised Ultimate Loads For Pile GroupsDocument22 paginiGeneralised Ultimate Loads For Pile GroupsValerioÎncă nu există evaluări
- MyResume RecentDocument1 paginăMyResume RecentNish PatwaÎncă nu există evaluări
- Almutairy / Musa MR: Boarding PassDocument1 paginăAlmutairy / Musa MR: Boarding PassMusaÎncă nu există evaluări
- Jharkhand August 2014Document61 paginiJharkhand August 2014Ron 61Încă nu există evaluări
- Electrical System in AENDocument21 paginiElectrical System in AENNilesh PatilÎncă nu există evaluări
- 20171025141013chapter-3 Chi-Square-Test PDFDocument28 pagini20171025141013chapter-3 Chi-Square-Test PDFNajwa WawaÎncă nu există evaluări
- The Division 2 - Guide To Highest Possible Weapon Damage PvE BuildDocument18 paginiThe Division 2 - Guide To Highest Possible Weapon Damage PvE BuildJjjjÎncă nu există evaluări
- Analysis of Mozarts k.475Document2 paginiAnalysis of Mozarts k.475ASPASIA FRAGKOUÎncă nu există evaluări
- International Beach Soccer Cup Bali 2023 October 4-7 - Ver 15-3-2023 - Sponsor UPDATED PDFDocument23 paginiInternational Beach Soccer Cup Bali 2023 October 4-7 - Ver 15-3-2023 - Sponsor UPDATED PDFPrincess Jasmine100% (1)
- Topic 3 - Analyzing The Marketing EnvironmentDocument28 paginiTopic 3 - Analyzing The Marketing Environmentmelissa chlÎncă nu există evaluări
- SAP IAG Admin GuideDocument182 paginiSAP IAG Admin GuidegadesigerÎncă nu există evaluări
- BMW Engine Wiring 2 OxDocument4 paginiBMW Engine Wiring 2 OxTomáš TdcÎncă nu există evaluări
- Ansi Numerical CodeDocument6 paginiAnsi Numerical Codekachra13Încă nu există evaluări
- MBF100 Subject OutlineDocument2 paginiMBF100 Subject OutlineMARUTI JEWELSÎncă nu există evaluări
- Fuel Injection PDFDocument11 paginiFuel Injection PDFscaniaÎncă nu există evaluări
- Making Sense of The Future of Libraries: Dan Dorner, Jennifer Campbell-Meier and Iva SetoDocument14 paginiMaking Sense of The Future of Libraries: Dan Dorner, Jennifer Campbell-Meier and Iva SetoBiblioteca IICEÎncă nu există evaluări
- Strategy Guide To Twilight Imperium Third EditionDocument74 paginiStrategy Guide To Twilight Imperium Third Editioninquartata100% (1)
- Caracterisation D'une Entreprise anglosaxonne-ETLV - STMG1.Document2 paginiCaracterisation D'une Entreprise anglosaxonne-ETLV - STMG1.meredith.licagaÎncă nu există evaluări
- DGA Furan AnalysisDocument42 paginiDGA Furan AnalysisShefian Md Dom100% (10)
- Sample Database of SQL in Mysql FormatDocument7 paginiSample Database of SQL in Mysql FormatsakonokeÎncă nu există evaluări
- Fallas Compresor Copeland-DesbloqueadoDocument16 paginiFallas Compresor Copeland-DesbloqueadoMabo MabotecnicaÎncă nu există evaluări
- Trading Book - AGDocument7 paginiTrading Book - AGAnilkumarGopinathanNairÎncă nu există evaluări
- Glossario - GETTY - IngDocument24 paginiGlossario - GETTY - IngFabio ZarattiniÎncă nu există evaluări
- Meyer and Zack KM CycleDocument16 paginiMeyer and Zack KM Cyclemohdasriomar84Încă nu există evaluări
- A Modified Linear Programming Method For Distribution System ReconfigurationDocument6 paginiA Modified Linear Programming Method For Distribution System Reconfigurationapi-3697505Încă nu există evaluări
- Presentacion Peaks Rms Lufs Como Usar Medidores FavorDocument16 paginiPresentacion Peaks Rms Lufs Como Usar Medidores Favorhector.obregon.martinezÎncă nu există evaluări
- Skin Care Creams, Lotions and Gels For Cosmetic Use - SpecificationDocument33 paginiSkin Care Creams, Lotions and Gels For Cosmetic Use - SpecificationJona Phie Montero NdtcnursingÎncă nu există evaluări
- Dr. Muhammad Mumtaz: Thesis TitleDocument10 paginiDr. Muhammad Mumtaz: Thesis TitleDr. Muhammad MumtazÎncă nu există evaluări