S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- 2x813 Linear Amplifier Cathode Input GW0FZYDocument16 pagini2x813 Linear Amplifier Cathode Input GW0FZYGus RudyÎncă nu există evaluări
- Ecee 513 - Module 5Document18 paginiEcee 513 - Module 5Jonnel PabicoÎncă nu există evaluări
- Week # 01 Introduction To Data CommunicationDocument8 paginiWeek # 01 Introduction To Data Communicationfunny vedioesÎncă nu există evaluări
- Howard SkemptonDocument4 paginiHoward SkemptonRichard ArthurÎncă nu există evaluări
- Guidelines Eo Performing ArtsDocument20 paginiGuidelines Eo Performing ArtsMr Nadeem ICTÎncă nu există evaluări
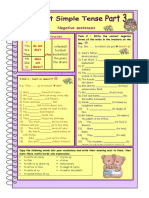
- Present Simple Tense Negative Sentences 3 Pages 6 Different Tasks With Key With Vocabulary CornerDocument5 paginiPresent Simple Tense Negative Sentences 3 Pages 6 Different Tasks With Key With Vocabulary CornerDina Ines Estupiñan SolanoÎncă nu există evaluări
- Sip5 Bcu SettingsDocument7 paginiSip5 Bcu Settingskarthik kanchiÎncă nu există evaluări
- A Timeline of Philippine LiteratureDocument2 paginiA Timeline of Philippine LiteratureFlor Maranan Cerro67% (3)
- Copyright and Related RightsDocument13 paginiCopyright and Related RightsRajesh KathrotiaÎncă nu există evaluări
- Music of John Ford ColeyDocument3 paginiMusic of John Ford Coleyparopilook100% (1)
- An Apology For PoetryDocument47 paginiAn Apology For PoetryJerald Sagaya NathanÎncă nu există evaluări
- Tu 154M111Document262 paginiTu 154M111arknaÎncă nu există evaluări
- HUC6800+ and HUC6800+C Broadcast Upconverters: Installation and Operation ManualDocument84 paginiHUC6800+ and HUC6800+C Broadcast Upconverters: Installation and Operation ManualTechne PhobosÎncă nu există evaluări
- Theatre NotesDocument8 paginiTheatre Noteskayteelyn17Încă nu există evaluări
- CXA60 Issue 1.2 (April 2020)Document57 paginiCXA60 Issue 1.2 (April 2020)marceloÎncă nu există evaluări
- CM6300 InstallDocument29 paginiCM6300 InstallLockdown Security CanadaÎncă nu există evaluări
- A Beginner Guide To Using MotoTrbo CPSDocument9 paginiA Beginner Guide To Using MotoTrbo CPSAchmad Arizki KosasihÎncă nu există evaluări
- The Creole Jazz Band Fake Book 1 - EbDocument267 paginiThe Creole Jazz Band Fake Book 1 - Ebjazzmimo100% (2)
- As of June 2022 - DSDocument55 paginiAs of June 2022 - DSDISSOCIATED In DisguiseÎncă nu există evaluări
- Measure PLL jitter using Cadence simulation toolsDocument34 paginiMeasure PLL jitter using Cadence simulation toolsAustin ShiÎncă nu există evaluări
- Why Study MusicDocument11 paginiWhy Study MusicVincent GalleyÎncă nu există evaluări
- ECE 445 - Optical Fiber Communications Lecture 01 - IntroductionDocument31 paginiECE 445 - Optical Fiber Communications Lecture 01 - IntroductionAuliaÎncă nu există evaluări
- Tape scripts for English listening practiceDocument24 paginiTape scripts for English listening practicebảo trân lê100% (1)
- Morir de Amor: Lam Mi7 Lam Mi7 LamDocument3 paginiMorir de Amor: Lam Mi7 Lam Mi7 Lammaxximiliano71Încă nu există evaluări
- RC 1978 04Document44 paginiRC 1978 04Jan PranÎncă nu există evaluări
- Italian Pronunciation Guide for SingersDocument5 paginiItalian Pronunciation Guide for SingersRajNarendran RajagopalÎncă nu există evaluări
- Yamaha RX-V765 Htr-6270 SM (ET)Document156 paginiYamaha RX-V765 Htr-6270 SM (ET)hifi-electronicÎncă nu există evaluări
- TOA 300 - 380sdDocument2 paginiTOA 300 - 380sdStephen_Pratt_868Încă nu există evaluări
- Wolstencroft The BearDocument9 paginiWolstencroft The BearSerene InÎncă nu există evaluări
- I Could Write Books Zanna Don TDocument7 paginiI Could Write Books Zanna Don TYan DiazÎncă nu există evaluări