S-ar putea să vă placă și
- Cinemática Del Robot PolarDocument16 paginiCinemática Del Robot PolarERNESTOÎncă nu există evaluări
- Diferencias Entre Modelo Cinemático Directo e InversoDocument6 paginiDiferencias Entre Modelo Cinemático Directo e InversoalbeiromarinsosaÎncă nu există evaluări
- Cinematic A Directa e InversaDocument22 paginiCinematic A Directa e InversaILiana Mendivil100% (1)
- RESUMENDocument9 paginiRESUMENAlex SalinasÎncă nu există evaluări
- Cinemática Del RobotDocument16 paginiCinemática Del RobotGerson Siguenza DavalosÎncă nu există evaluări
- Cinemática DirectaDocument3 paginiCinemática DirectaDavid MurilloÎncă nu există evaluări
- Evaluación Tercer Parcial Ing TomasDocument16 paginiEvaluación Tercer Parcial Ing TomasAbel Nohpal BrionesÎncă nu există evaluări
- Configuraciones SingularesDocument6 paginiConfiguraciones SingularesMiguelAngelJaureguiÎncă nu există evaluări
- Cinemática DirectaDocument3 paginiCinemática DirectaAnonymous v6jRtlÎncă nu există evaluări
- Cinematica RoboticaDocument35 paginiCinematica RoboticaOrlando MorenoÎncă nu există evaluări
- Tarea CinematicasDocument5 paginiTarea CinematicasLeonardoGonzálezÎncă nu există evaluări
- Brazo Robotico de 5 GLDDocument15 paginiBrazo Robotico de 5 GLDWALTER MAX MONTAÑO CAMACHOÎncă nu există evaluări
- Brazo Robótico 5GDL Procesos de Vacunacion de Ganado1Document18 paginiBrazo Robótico 5GDL Procesos de Vacunacion de Ganado1Jhoel MedranoÎncă nu există evaluări
- Cinematica y Dinamica Del RobotDocument17 paginiCinematica y Dinamica Del RobotLuis Hoyos BautistaÎncă nu există evaluări
- Cinemática Directa e InversaDocument3 paginiCinemática Directa e InversaElJuanV2Încă nu există evaluări
- Articulo Cinematica Directa KUKADocument5 paginiArticulo Cinematica Directa KUKAAimee MizraimÎncă nu există evaluări
- Modelo Dinamico 2Document9 paginiModelo Dinamico 2Osmar De La CruzÎncă nu există evaluări
- ConsultaDocument15 paginiConsultaDaniel OrozcoÎncă nu există evaluări
- Miranda Terrazas Luis Alberto Miranda TerrazasDocument13 paginiMiranda Terrazas Luis Alberto Miranda TerrazasGordon NorfcothÎncă nu există evaluări
- U1 Robotica PDFDocument10 paginiU1 Robotica PDFAlex BanalexÎncă nu există evaluări
- El Robot ScaraDocument8 paginiEl Robot ScaraJordan BenítezÎncă nu există evaluări
- Representacion de Denavit HartenbergDocument21 paginiRepresentacion de Denavit HartenbergDiego de la Cruz0% (1)
- Fase3 Grupo44Document41 paginiFase3 Grupo44Martin Rodriguez GonzalezÎncă nu există evaluări
- Robtic. IndustrialDocument9 paginiRobtic. IndustrialMARLON EFRAIN LLAMBA LEMAÎncă nu există evaluări
- Cinemática de RobotsDocument10 paginiCinemática de RobotsRey ArmandoÎncă nu există evaluări
- DenavitDocument30 paginiDenavitJose LopezÎncă nu există evaluări
- Cinemática de RobotsDocument17 paginiCinemática de RobotsxdarthdaverxÎncă nu există evaluări
- Localizacion RaicesDocument25 paginiLocalizacion RaicesVeronica RamirezÎncă nu există evaluări
- Capítulo - 3 DinámicaDocument29 paginiCapítulo - 3 DinámicaMiguel PérezÎncă nu există evaluări
- 9 Trabajo2Document15 pagini9 Trabajo2Kelly Arrazola SalasÎncă nu există evaluări
- Cinemática Inversa de Un Brazo RobotDocument7 paginiCinemática Inversa de Un Brazo RobotRobinson PeraltaÎncă nu există evaluări
- Modelización de Sistemas MecánicosDocument47 paginiModelización de Sistemas MecánicosahigueraÎncă nu există evaluări
- 1er Parcial 2do Taller PDFDocument2 pagini1er Parcial 2do Taller PDFCristian Bravo MartinezÎncă nu există evaluări
- B - (Cinemática + Dinámica) de Un Robot ManipuladorDocument45 paginiB - (Cinemática + Dinámica) de Un Robot ManipuladorrubiohotÎncă nu există evaluări
- Diseno Mecatronico Estudio y Modelamiento Robot KukaDocument10 paginiDiseno Mecatronico Estudio y Modelamiento Robot Kukadario mendozaÎncă nu există evaluări
- 4 - A - Cinemática - Inversa - Metodo GeometricoDocument8 pagini4 - A - Cinemática - Inversa - Metodo GeometricoJUAN DAVID BECERRA MOLANO100% (1)
- Análisis de Pequeña SeñalDocument6 paginiAnálisis de Pequeña SeñalDani TapiaÎncă nu există evaluări
- Trabajo Individual Lluvia de IdeasDocument7 paginiTrabajo Individual Lluvia de IdeasMiguel Angel Garcia FerroÎncă nu există evaluări
- Cinemática Del RobotsDocument3 paginiCinemática Del RobotsAlexis RiveraÎncă nu există evaluări
- Robotica - Erramientas MatematicasDocument5 paginiRobotica - Erramientas MatematicasCristian AndrangoÎncă nu există evaluări
- Grupo - 299011 - 1 - Fase 3Document21 paginiGrupo - 299011 - 1 - Fase 3catalinaÎncă nu există evaluări
- Fase3 ROBOTICA UNADDocument6 paginiFase3 ROBOTICA UNADdiana cuellarÎncă nu există evaluări
- Denavit HartenbergDocument12 paginiDenavit HartenbergMinerva VargasÎncă nu există evaluări
- Mod 2Document10 paginiMod 2IlseZamoraÎncă nu există evaluări
- Cinematica Directa e InversaDocument11 paginiCinematica Directa e InversaSergio Guevara MenaÎncă nu există evaluări
- Act 3 CinedirDocument11 paginiAct 3 CinedirAlberto GARCIAÎncă nu există evaluări
- Actividad Fundamental 1Document10 paginiActividad Fundamental 1Alberto GARCIAÎncă nu există evaluări
- Cinemática de Brazo Manipulador de 2 GDL SalomonDocument8 paginiCinemática de Brazo Manipulador de 2 GDL Salomonjuanillofc100% (5)
- Ejercicio DHDocument5 paginiEjercicio DHAlex Atao EnriquezÎncă nu există evaluări
- Modelo Cinemático Directo Del Robot CRS Robotics A465Document29 paginiModelo Cinemático Directo Del Robot CRS Robotics A465FernandoÎncă nu există evaluări
- DesarroolloDocument3 paginiDesarroolloJader PerezÎncă nu există evaluări
- Fredy - Chavarro - Fase 3 - Realizar Lluvia de IdeasDocument19 paginiFredy - Chavarro - Fase 3 - Realizar Lluvia de IdeasJhon Fredy Chavarro RubianoÎncă nu există evaluări
- Tipos de Modelado CinematicoDocument5 paginiTipos de Modelado CinematicoJorge MendezÎncă nu există evaluări
- Poster em ManuelDocument1 paginăPoster em Manuelemmanuel_htaÎncă nu există evaluări
- Matrices de Rotación y Cinemática DirectaDocument8 paginiMatrices de Rotación y Cinemática DirectaRodolfo Fernández GallardoÎncă nu există evaluări
- Introducción A La Robótica Desde La Ingeniería MecánicaDocument11 paginiIntroducción A La Robótica Desde La Ingeniería MecánicajuanmanuelÎncă nu există evaluări
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe la EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoEvaluare: 4.5 din 5 stele4.5/5 (12)
- Practica LamparasDocument13 paginiPractica LamparasAlberto CentenoÎncă nu există evaluări
- Compuertas Lógicasp1Document14 paginiCompuertas Lógicasp1Alberto CentenoÎncă nu există evaluări
- Eficiencia de Un MotorDocument11 paginiEficiencia de Un MotorAlberto CentenoÎncă nu există evaluări
- Arbol L PDFDocument1 paginăArbol L PDFAlberto CentenoÎncă nu există evaluări
- Ensamblaje de 10 Levas PDFDocument1 paginăEnsamblaje de 10 Levas PDFAlberto CentenoÎncă nu există evaluări
- Lista de Material para La Materia de MicrocontroladorseDocument2 paginiLista de Material para La Materia de MicrocontroladorseAlberto CentenoÎncă nu există evaluări
- Plantilla Diseño de Arbol de LevasDocument1 paginăPlantilla Diseño de Arbol de LevasAlberto Centeno100% (1)
- Importancia de Un Buen ControlDocument9 paginiImportancia de Un Buen ControlAlberto CentenoÎncă nu există evaluări
- Historia de DupontDocument3 paginiHistoria de DupontAlberto CentenoÎncă nu există evaluări
- Energia AlternaDocument27 paginiEnergia AlternaAlberto CentenoÎncă nu există evaluări
- Actitudes de NegociacionDocument8 paginiActitudes de NegociacionAlberto CentenoÎncă nu există evaluări
- Energia AlternaDocument27 paginiEnergia AlternaAlberto CentenoÎncă nu există evaluări
- CIRC DE POTENCIA 1de2 MANUAL DEL ESTUDIANTE 25986Document43 paginiCIRC DE POTENCIA 1de2 MANUAL DEL ESTUDIANTE 25986Alberto Centeno100% (1)
- Reporte de InstrumentacionDocument9 paginiReporte de InstrumentacionAlberto CentenoÎncă nu există evaluări
- Actitudes de NegociacionDocument8 paginiActitudes de NegociacionAlberto CentenoÎncă nu există evaluări
- Security HouseDocument1 paginăSecurity HouseAlberto CentenoÎncă nu există evaluări
- Reporte Estadia Carlos Alberto Almanza Centeno MET 6D..Document100 paginiReporte Estadia Carlos Alberto Almanza Centeno MET 6D..Alberto CentenoÎncă nu există evaluări
- Untitled PDFDocument1 paginăUntitled PDFAlberto CentenoÎncă nu există evaluări
- Mitsubishi Lancer EvolutionDocument15 paginiMitsubishi Lancer EvolutionAlberto CentenoÎncă nu există evaluări
- Con AsamiDocument1 paginăCon AsamiAlberto CentenoÎncă nu există evaluări
- Materiales No FerrososDocument12 paginiMateriales No FerrososAlberto CentenoÎncă nu există evaluări
- Exposición 2Document10 paginiExposición 2Alberto CentenoÎncă nu există evaluări
- COVID-19: en Las NoticiasDocument13 paginiCOVID-19: en Las NoticiasAlejandra MososÎncă nu există evaluări
- Manejo de La Diabetes para Pacientes HospitalizadosDocument20 paginiManejo de La Diabetes para Pacientes Hospitalizadosjaneth mÎncă nu există evaluări
- Memoria SCM2017Document71 paginiMemoria SCM2017cristian villegasÎncă nu există evaluări
- ¿Cómo Modular La Voz para Lograr Una Comunicación EficienteDocument16 pagini¿Cómo Modular La Voz para Lograr Una Comunicación EficienteEVELYN JIMENEZÎncă nu există evaluări
- Pinedo Arevalo Miguel Muros Suelo ReforzadoDocument106 paginiPinedo Arevalo Miguel Muros Suelo ReforzadoHebert Rodríguez SantiagoÎncă nu există evaluări
- Cierre de Mina Clase 11 C. InstalacDocument25 paginiCierre de Mina Clase 11 C. InstalacABEL CHAVEZ DELGADOÎncă nu există evaluări
- Trabajo de Investigación de DeporteDocument4 paginiTrabajo de Investigación de DeporteJose JimenezÎncă nu există evaluări
- Resumen Segundo Parcial RealesDocument64 paginiResumen Segundo Parcial Realesandrea vidaurreÎncă nu există evaluări
- Práctica VALORACION ACIDO BASEDocument4 paginiPráctica VALORACION ACIDO BASEAngel MedranoÎncă nu există evaluări
- EVANSDocument21 paginiEVANS46697451Încă nu există evaluări
- Lineamientos para La Elaboración de Los Procedimientos de Manejo Ambiental Abril 2014Document25 paginiLineamientos para La Elaboración de Los Procedimientos de Manejo Ambiental Abril 2014Pedro RomeraÎncă nu există evaluări
- Poster Dia Del GlaucomaDocument1 paginăPoster Dia Del GlaucomaPatricia Andrea Pérez GonzálezÎncă nu există evaluări
- Uso de Medicamentos en El Adulto MayorDocument13 paginiUso de Medicamentos en El Adulto MayordipperÎncă nu există evaluări
- Peligro de ExtincionDocument2 paginiPeligro de ExtincionMelina HernandezÎncă nu există evaluări
- Cayendo Hacia Arriba by Taboo - Read About How Tab Hit Rock Bottom and Pulled Himself Up Again (Spanish Edition)Document28 paginiCayendo Hacia Arriba by Taboo - Read About How Tab Hit Rock Bottom and Pulled Himself Up Again (Spanish Edition)Simon and SchusterÎncă nu există evaluări
- LOVASTATINADocument6 paginiLOVASTATINAsandra valeroÎncă nu există evaluări
- Pruebas de Hermeticidad A Tuberia Hidraulica PDFDocument4 paginiPruebas de Hermeticidad A Tuberia Hidraulica PDFErick Noel Manzanares HernandezÎncă nu există evaluări
- Ficha # 4 Proceso de ReplicaciónDocument11 paginiFicha # 4 Proceso de Replicaciónheidi monestelÎncă nu există evaluări
- 3.1.4 Tecnologia Fotovoltaica - MER601 - Juan MDocument49 pagini3.1.4 Tecnologia Fotovoltaica - MER601 - Juan MaugustoÎncă nu există evaluări
- Monografia TraumatologíaDocument26 paginiMonografia TraumatologíaJunior Malele MayubeÎncă nu există evaluări
- Climas Del PeruDocument5 paginiClimas Del PeruMarco Antonio Mamani Centeno100% (1)
- Cuatro Signos de Alarma Del LinfedemaDocument3 paginiCuatro Signos de Alarma Del LinfedemaHospital Ntra. Sra. del RosarioÎncă nu există evaluări
- Ergonomia en LaparosDocument16 paginiErgonomia en LaparosMiguel Fernando ALban VasquezÎncă nu există evaluări
- Clase 2Document15 paginiClase 2profjnapoles100% (1)
- Constante de Equilibrio. Disolución Del Kno3.Document12 paginiConstante de Equilibrio. Disolución Del Kno3.Jesús Alejandro100% (1)
- FPJ-10-Acta-de-Inspección-Técnica-a-Cadá (1) CRIMI CAMPODocument10 paginiFPJ-10-Acta-de-Inspección-Técnica-a-Cadá (1) CRIMI CAMPOKaren AlexandraÎncă nu există evaluări
- Sol AmigurumiDocument2 paginiSol AmigurumiAndreina Fermin100% (1)
- Cuencas Sedimentarias y TectónicaDocument14 paginiCuencas Sedimentarias y TectónicaJhonatan Torrez RodriguezÎncă nu există evaluări
- MaestrosDocument1.419 paginiMaestrosCintia CintiÎncă nu există evaluări
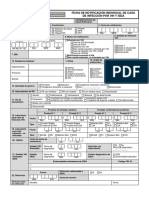
- Ficha de Notificación Individual Caso de Infeccion Por VIH y SidaDocument3 paginiFicha de Notificación Individual Caso de Infeccion Por VIH y SidaNuñez NiloÎncă nu există evaluări