S-ar putea să vă placă și
- 7 Design Root LocusDocument31 pagini7 Design Root LocusDogukan KarabeyinÎncă nu există evaluări
- PID Control: Introduction ToDocument6 paginiPID Control: Introduction ToHi fiveÎncă nu există evaluări
- Motion ControlDocument2 paginiMotion ControlSam SamovarkovÎncă nu există evaluări
- Boost Closed LoopDocument10 paginiBoost Closed Loopzakaria1500Încă nu există evaluări
- Proportional + Integral + Derivative Controller Using Op-AmpDocument8 paginiProportional + Integral + Derivative Controller Using Op-AmpdharanikaÎncă nu există evaluări
- Transient Stability 2Document15 paginiTransient Stability 2yonoka aldinugraha100% (1)
- Brief Review of Control TheoryDocument19 paginiBrief Review of Control TheoryMuhammad SofyanÎncă nu există evaluări
- PIDDocument21 paginiPIDMukesh JainÎncă nu există evaluări
- Economic Dispatch Using Dynamic ProgrammingDocument22 paginiEconomic Dispatch Using Dynamic ProgrammingSyed Ali RazaÎncă nu există evaluări
- Mathematical Model of Inverted Pendulum SystemDocument18 paginiMathematical Model of Inverted Pendulum SystemMajid Mehmood100% (1)
- PIIIDDocument12 paginiPIIIDLionel81Încă nu există evaluări
- ME451: Control Systems Course RoadmapDocument6 paginiME451: Control Systems Course RoadmapVu NghiaÎncă nu există evaluări
- Servo Tuning TutorialDocument38 paginiServo Tuning TutorialpranavÎncă nu există evaluări
- Adjustment of Servo System : (Trial Run of Unit / Trial Run Combined With Mechanism)Document7 paginiAdjustment of Servo System : (Trial Run of Unit / Trial Run Combined With Mechanism)Chandru ChristurajÎncă nu există evaluări
- Dynamics and Control Topic 1. Overview and IntroductionDocument30 paginiDynamics and Control Topic 1. Overview and IntroductionLuqman Ahmad NazimÎncă nu există evaluări
- Brief Review of Control TheoryDocument19 paginiBrief Review of Control TheoryVigneshRamakrishnanÎncă nu există evaluări
- ME L20 RootLocusLeadDocument6 paginiME L20 RootLocusLeadRezkodaÎncă nu există evaluări
- Amd Pid ControlDocument12 paginiAmd Pid ControlpfalencarÎncă nu există evaluări
- Use To PIDE RockwellDocument22 paginiUse To PIDE Rockwellarturo neiraÎncă nu există evaluări
- The Dark Side of LoopDocument143 paginiThe Dark Side of Loopsongzheng chenÎncă nu există evaluări
- Effects of A PID Controller in Closed Loop Feedback SystemDocument4 paginiEffects of A PID Controller in Closed Loop Feedback Systemali.azim1380Încă nu există evaluări
- Proportional Integral DerivativeDocument20 paginiProportional Integral DerivativealfierebastardoÎncă nu există evaluări
- Enpm808J Rehabilitation Robotics Lecture #3 Anindo Roy, PHDDocument103 paginiEnpm808J Rehabilitation Robotics Lecture #3 Anindo Roy, PHDRahul Subramonian BamaÎncă nu există evaluări
- Control Pitch, Roll and Yaw Axis of AircraftDocument49 paginiControl Pitch, Roll and Yaw Axis of AircraftRavi PansheriyaÎncă nu există evaluări
- EEE318 Experiment 5Document18 paginiEEE318 Experiment 5Abid AbdullahÎncă nu există evaluări
- Variation of Plant Gain: Visual Modelq TrainingDocument12 paginiVariation of Plant Gain: Visual Modelq Trainingsay khalÎncă nu există evaluări
- Pid TuningDocument11 paginiPid TuningIzzHyukÎncă nu există evaluări
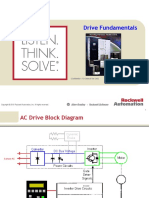
- Drive Fundamentals GDDocument18 paginiDrive Fundamentals GDAlbinNavaÎncă nu există evaluări
- Unitvi Control SystemsDocument47 paginiUnitvi Control SystemsVishal SharmaÎncă nu există evaluări
- Pid Flex SensorDocument48 paginiPid Flex SensorjobechoÎncă nu există evaluări
- ARCODE Controller PID Gain Settings.V121.enDocument9 paginiARCODE Controller PID Gain Settings.V121.enSaighi Hamza100% (1)
- PID Control - KeyDocument50 paginiPID Control - KeyHaozhi LiÎncă nu există evaluări
- Basics On Process Control and PID'sDocument31 paginiBasics On Process Control and PID'smahmoud EissaÎncă nu există evaluări
- Sistem Kendali: Teknik MesinDocument36 paginiSistem Kendali: Teknik MesinSugeng HariyantoÎncă nu există evaluări
- Controller Design Using Root Loci MethodDocument34 paginiController Design Using Root Loci Methodiamketul6340Încă nu există evaluări
- Exp05 EEE318Document9 paginiExp05 EEE318Abid AbdullahÎncă nu există evaluări
- Speed Control of DC Motor Using PID Smart ControllerDocument10 paginiSpeed Control of DC Motor Using PID Smart ControllerEngr Aadi Awan SamsaalÎncă nu există evaluări
- 1 - 1 - IntroducaoDocument31 pagini1 - 1 - IntroducaoAndré GomesÎncă nu există evaluări
- Basic Ladder InstructionsDocument19 paginiBasic Ladder InstructionsQamar Hassan IqbalÎncă nu există evaluări
- 2 Basic Ladder Instructions R1.1Document19 pagini2 Basic Ladder Instructions R1.1Ahmed SamiÎncă nu există evaluări
- Compensation in Control System - Lag Lead Compensation - Electrical4uDocument11 paginiCompensation in Control System - Lag Lead Compensation - Electrical4uKrutik DhabaliyaÎncă nu există evaluări
- PID Tuning TutorDocument4 paginiPID Tuning TutorKiran KulkarniÎncă nu există evaluări
- Lecture PPT Digital ControlDocument8 paginiLecture PPT Digital ControlFarwaÎncă nu există evaluări
- Control Systems For Robots: Prof. Robert Marmelstein CPSC 527 - Robotics Spring 2010Document40 paginiControl Systems For Robots: Prof. Robert Marmelstein CPSC 527 - Robotics Spring 2010Ritesh SinghÎncă nu există evaluări
- Digital Control Systems (DCS) : Lecture-1-2 Lead CompensationDocument61 paginiDigital Control Systems (DCS) : Lecture-1-2 Lead CompensationMeer Zafarullah NoohaniÎncă nu există evaluări
- 英文PID资料Document3 pagini英文PID资料Richard LeeÎncă nu există evaluări
- Control Systems Lect. 4 PIDDocument65 paginiControl Systems Lect. 4 PIDhmaymadÎncă nu există evaluări
- Transient Stability 2Document29 paginiTransient Stability 2Carlos Ortiz de ZevallosÎncă nu există evaluări
- Design of Control Systems Cascade Root LocusDocument25 paginiDesign of Control Systems Cascade Root Locusaymanwolf3Încă nu există evaluări
- Controller Design Using Frequency ResponseDocument35 paginiController Design Using Frequency Responseiamketul6340Încă nu există evaluări
- Lec 1,2 IntroductionDocument29 paginiLec 1,2 Introductionmr.x1549Încă nu există evaluări
- 04 1 Selic Watson RT UML - TutorialDocument175 pagini04 1 Selic Watson RT UML - TutorialMarius Iulian Mihailescu100% (1)
- Guided By: Ms. Jyoti Soni Submitted By: Riyanka Sharma Iem, Me (Final Semester)Document27 paginiGuided By: Ms. Jyoti Soni Submitted By: Riyanka Sharma Iem, Me (Final Semester)Rianca SharmaÎncă nu există evaluări
- Steer-by-Wire: Implications For Vehicle Handling and Safety: Paul Yih May 27, 2004Document63 paginiSteer-by-Wire: Implications For Vehicle Handling and Safety: Paul Yih May 27, 2004Mihir ShahÎncă nu există evaluări
- C5 MicroEcoDocument11 paginiC5 MicroEcoShashwat JhaÎncă nu există evaluări
- L1 - Introduction - Intro CONTROL SYSTEMDocument4 paginiL1 - Introduction - Intro CONTROL SYSTEMkimiÎncă nu există evaluări
- V1.0 - 1901007 IS550 20140815 (104 123) .ZH CN - enDocument20 paginiV1.0 - 1901007 IS550 20140815 (104 123) .ZH CN - enckatiÎncă nu există evaluări
- FX5 (Positioning Control) TPA - 1Document47 paginiFX5 (Positioning Control) TPA - 1Keta Kanisorn SeubsujaÎncă nu există evaluări
- Pandaros Workshopman-03 PDFDocument33 paginiPandaros Workshopman-03 PDFRodrigo Santibañez100% (2)
- 018 10Document3 pagini018 10ilkerkozturkÎncă nu există evaluări
- 2021 BUILDING UTILITIES 3 - Module 2 Lecture 5 LUMINAIRES (S)Document46 pagini2021 BUILDING UTILITIES 3 - Module 2 Lecture 5 LUMINAIRES (S)Sophia Manila SillaÎncă nu există evaluări
- Mil PRF 13830BDocument82 paginiMil PRF 13830Bmmottola12Încă nu există evaluări
- Specs Mantilla UV BT8800 Oct 2014Document2 paginiSpecs Mantilla UV BT8800 Oct 2014Julio MendezÎncă nu există evaluări
- 2017-CH-738 Muhammad BilalDocument4 pagini2017-CH-738 Muhammad BilalMuHaMMaD BiLaLÎncă nu există evaluări
- SSC JE Mechanical Study Material Strength of Materials PDFDocument13 paginiSSC JE Mechanical Study Material Strength of Materials PDFSameer ShahÎncă nu există evaluări
- Et3034tux Courseware. Question 2.3.1 Al 2.3.3Document3 paginiEt3034tux Courseware. Question 2.3.1 Al 2.3.3Luis EmprendedorÎncă nu există evaluări
- 2018 JC1 H1 Chem EOY P1 P2 Answers With CommentsDocument17 pagini2018 JC1 H1 Chem EOY P1 P2 Answers With CommentsSeth LimÎncă nu există evaluări
- PROBLEMS For Orifice and WeirsDocument1 paginăPROBLEMS For Orifice and WeirsIrene Grace Batalao50% (2)
- Vibrations ME400Document32 paginiVibrations ME400Nick MezaÎncă nu există evaluări
- High-Tensile Steel Wire Mesh TECCO G45/2: Technical Data SheetDocument1 paginăHigh-Tensile Steel Wire Mesh TECCO G45/2: Technical Data SheetGUNAÎncă nu există evaluări
- Einstein and The Photoelectric Effect: H. J. Carmichael University of AucklandDocument29 paginiEinstein and The Photoelectric Effect: H. J. Carmichael University of AucklandBrahmanand TiwariÎncă nu există evaluări
- Solution Set 7Document15 paginiSolution Set 7Jean AraúzÎncă nu există evaluări
- Section 4.3: Solving Friction Problems: Tutorial 1 Practice, Page 174Document10 paginiSection 4.3: Solving Friction Problems: Tutorial 1 Practice, Page 174Nagma AhmedÎncă nu există evaluări
- Exchap 02 AnsDocument11 paginiExchap 02 AnsMewnEProwtÎncă nu există evaluări
- Green Bipropellant Optimisation AOkninskiDocument11 paginiGreen Bipropellant Optimisation AOkninskiMariano SerranoÎncă nu există evaluări
- Design and Development of True Centrifugal Casting Machine: Prof. M. D. PatelDocument34 paginiDesign and Development of True Centrifugal Casting Machine: Prof. M. D. Patelmuse100% (1)
- Effectof Cyclic Loadingsonthe Shear StrengthandDocument14 paginiEffectof Cyclic Loadingsonthe Shear StrengthandAbel MulugetaÎncă nu există evaluări
- 340P PDFDocument2 pagini340P PDFBujar DalipiÎncă nu există evaluări
- Gauss Law Lab ExampleDocument6 paginiGauss Law Lab ExampleAnthony MajinianÎncă nu există evaluări
- Flowserve - CPX Chemical Process Reference Manual PDFDocument125 paginiFlowserve - CPX Chemical Process Reference Manual PDFthod3r100% (4)
- R0-Sliding Gate, Fence, LadderDocument90 paginiR0-Sliding Gate, Fence, LadderMariam MousaÎncă nu există evaluări
- Pressure Gauge TerminologyDocument2 paginiPressure Gauge TerminologySaeed VuÎncă nu există evaluări
- 2.2work Book Chemistry Chapter 2.2 IB DPDocument55 pagini2.2work Book Chemistry Chapter 2.2 IB DPSemwezi EnockÎncă nu există evaluări
- Design of Column Base PlatesDocument1 paginăDesign of Column Base PlatesMelchizedek EllÎncă nu există evaluări
- Drilling Jar PlacementDocument3 paginiDrilling Jar Placementrdos1467% (3)
- Chain Inspection & MaintenanceDocument22 paginiChain Inspection & MaintenanceRajesh Kumar ChaubeyÎncă nu există evaluări
- McGraw-Edison Outdoor Lighting Overview Brochure 1971Document8 paginiMcGraw-Edison Outdoor Lighting Overview Brochure 1971Alan MastersÎncă nu există evaluări
- Introduction To A Real-Time Weather ForecastingDocument20 paginiIntroduction To A Real-Time Weather ForecastingjjjdklcfjsdcfÎncă nu există evaluări
- Product Maintenance Information: Contact-Cooled Rotary Screw Air CompressorDocument16 paginiProduct Maintenance Information: Contact-Cooled Rotary Screw Air CompressorEritimÎncă nu există evaluări