S-ar putea să vă placă și
- 02 Esp Tec - Inst. Electromecnicas - CorregidoDocument138 pagini02 Esp Tec - Inst. Electromecnicas - CorregidoPAOLAÎncă nu există evaluări
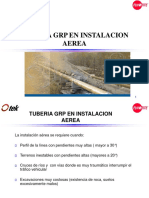
- 3ra Unidad. - Instalacion Aerea Con Tuberia PRFVDocument32 pagini3ra Unidad. - Instalacion Aerea Con Tuberia PRFVJose Callapaza YaravielÎncă nu există evaluări
- Actividad 2.1 AutoevaluacionesDocument22 paginiActividad 2.1 AutoevaluacionesRamón A. Domínguez MendozaÎncă nu există evaluări
- Planta Microcervecera Ecuador 2700 L MesDocument0 paginiPlanta Microcervecera Ecuador 2700 L MesArmas AlexisÎncă nu există evaluări
- Unión Por Bridas en Tubos de PE. Dimensiones y SolucionesDocument8 paginiUnión Por Bridas en Tubos de PE. Dimensiones y Solucionescristian salaÎncă nu există evaluări
- Relacion de PartidasDocument5 paginiRelacion de PartidasJefferson GarridoÎncă nu există evaluări
- F.T. Tuberia SCH40Document1 paginăF.T. Tuberia SCH40Jorge HurtadoÎncă nu există evaluări
- FEMA E-74 Part 6.en - EsDocument105 paginiFEMA E-74 Part 6.en - EsDavo Duran EugenioÎncă nu există evaluări
- Red de Distribucion Cerrada de Agua PotaDocument18 paginiRed de Distribucion Cerrada de Agua Potamanuel navaÎncă nu există evaluări
- Asme B31Document2 paginiAsme B31enigma27020% (1)
- U3 Lineas de ConducciónDocument51 paginiU3 Lineas de ConducciónEliseo Cruz HernandezÎncă nu există evaluări
- Manual VentilacionDocument9 paginiManual VentilacionCarlos Manuel Ferrer RodriguezÎncă nu există evaluări
- Check List INEN 439Document6 paginiCheck List INEN 439Luis Fernando Penarreta SolisÎncă nu există evaluări
- Resolucion No. 6-2013 Plomeros. RefrendadaDocument10 paginiResolucion No. 6-2013 Plomeros. RefrendadaFray TejadaÎncă nu există evaluări
- Metrados Multifamilar HuauraDocument4 paginiMetrados Multifamilar HuauraRichardÎncă nu există evaluări
- Cotizacion Tigre PlasmarDocument1 paginăCotizacion Tigre Plasmarbismark Machuca Fernandez100% (1)
- Century Medium Tech Data Esp Steris 2Document9 paginiCentury Medium Tech Data Esp Steris 2Miriam SanchezÎncă nu există evaluări
- Firetrace Catalogo Minerias ResponseDocument4 paginiFiretrace Catalogo Minerias ResponseOscar Acevedo MirandaÎncă nu există evaluări
- Proyecto Intalaciones Hidraulicas 222222Document17 paginiProyecto Intalaciones Hidraulicas 222222Mabel MuñozÎncă nu există evaluări
- Numeros GeneradoresDocument7 paginiNumeros GeneradoresLaura100% (1)
- Examen Control de PozosDocument7 paginiExamen Control de PozosAnonymous jqevOeP7Încă nu există evaluări
- IS-02Document1 paginăIS-02Leonardo Favio Flores SilvaÎncă nu există evaluări
- Memoria Tecnica Estacion DepuradoraDocument48 paginiMemoria Tecnica Estacion Depuradoraantonio_garberi100% (1)
- Correlacion Beggs y BrillDocument6 paginiCorrelacion Beggs y BrillNicolás Vincenti WadsworthÎncă nu există evaluări
- CALCULOS ELÉCTRICO Proyecto Bolivar PDFDocument5 paginiCALCULOS ELÉCTRICO Proyecto Bolivar PDFjose bolivarÎncă nu există evaluări
- PXL-GDSSSTPA-PCS-06 Bloqueo de Energia y Materiales PeligrososDocument41 paginiPXL-GDSSSTPA-PCS-06 Bloqueo de Energia y Materiales PeligrososJuan Andrés González Montero100% (1)
- Recomendaciones Tecnicas Procobre 2016Document40 paginiRecomendaciones Tecnicas Procobre 2016Alvaro B VidroÎncă nu există evaluări
- Tipos de Drenajes para CarreterasDocument24 paginiTipos de Drenajes para CarreterasAdolfo Espinoza33% (3)
- Tarea Academica 2Document14 paginiTarea Academica 2irving guido alvarez valenciaÎncă nu există evaluări