S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Constraints, Generalised Coordinates and Configuration SpaceDocument7 paginiConstraints, Generalised Coordinates and Configuration SpaceLeo KutsÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Wap4 Cab DimensionsDocument64 paginiWap4 Cab DimensionsMUZZAMMILSHERIFF100% (4)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- SimlabDocument32 paginiSimlabAkbar AliÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Earth Resistance Calculations and Soil Resistivity MeasurementsDocument27 paginiEarth Resistance Calculations and Soil Resistivity MeasurementsAnonymous FmtXlUVyMGÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Difference Between DTC and Scalar Mode PDFDocument6 paginiDifference Between DTC and Scalar Mode PDFVitali LursmanashviliÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- 淺談光電同調控制( Coherent Control )的視 野在物理與化學應用上可能帶來之新影響Document55 pagini淺談光電同調控制( Coherent Control )的視 野在物理與化學應用上可能帶來之新影響Hovering BC LiaoÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- IRXm Product GuideDocument8 paginiIRXm Product Guidedeepak2628Încă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Travelling Waves 1Document12 paginiTravelling Waves 1Shareef ChampÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- N Detailed Modelling PDFDocument32 paginiN Detailed Modelling PDFhussain100% (1)
- Sizing of DG Unit To Reduce Losses in Radial Distribution - A Case StudyDocument7 paginiSizing of DG Unit To Reduce Losses in Radial Distribution - A Case StudyDizky Christian HadiÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- 250 General Guidelines For The Integration of A New Underground Cable System in The NetworkDocument177 pagini250 General Guidelines For The Integration of A New Underground Cable System in The NetworkepriÎncă nu există evaluări
- Ituri Rural ElectrificationDocument15 paginiIturi Rural ElectrificationDdumbashaf SamÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- MAGNETIC PISTON ENGINEDocument7 paginiMAGNETIC PISTON ENGINERahul YadavÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- ELTR100 Sec1 InstructorDocument175 paginiELTR100 Sec1 InstructorVinod VijayanÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- AC MOTOR DRIVE Operation ManualDocument176 paginiAC MOTOR DRIVE Operation ManualFida HussainÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- CST Microwave StudioDocument28 paginiCST Microwave StudiodheifibraheemÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- PEC 2017 Supplement 1-2019Document2 paginiPEC 2017 Supplement 1-2019Noel RazaÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- Sir Isaac Newton'S de Gravitatione Et Aequipondio Fluidorum: Translated by W. B. AllenDocument24 paginiSir Isaac Newton'S de Gravitatione Et Aequipondio Fluidorum: Translated by W. B. AllenGabrielÎncă nu există evaluări
- Friction: Chapter OutlineDocument12 paginiFriction: Chapter OutlineUsama AlmalakiÎncă nu există evaluări
- XXXXXX: Common Entrance Test - 2017Document20 paginiXXXXXX: Common Entrance Test - 2017Ganesh BhandaryÎncă nu există evaluări
- Physics 20 Unit C: Energy, Work and Circular MotionDocument1 paginăPhysics 20 Unit C: Energy, Work and Circular MotionUnzal FatehullahÎncă nu există evaluări
- SDQSFDocument103 paginiSDQSFHuy Khôi HàÎncă nu există evaluări
- Manual de Servicio TV Toshiba 20ar20 - 30Document32 paginiManual de Servicio TV Toshiba 20ar20 - 30Antonio José Montaña Pérez de Cristo100% (1)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Mechanical Design of Overhead Transmission LinesDocument61 paginiMechanical Design of Overhead Transmission LinesGetahun shankoÎncă nu există evaluări
- Aluminum PV Wire Electrical Properties and Conductor ConfigurationsDocument1 paginăAluminum PV Wire Electrical Properties and Conductor Configurationsgerrzen64Încă nu există evaluări
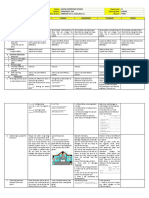
- DLL - SCIENCE 4 - Q3 - WEEK 1 Explain The Effects of Force@edumaymay@lauramosDocument7 paginiDLL - SCIENCE 4 - Q3 - WEEK 1 Explain The Effects of Force@edumaymay@lauramosjeraldine endenoÎncă nu există evaluări
- Eecs166 267 Syllabus15Document3 paginiEecs166 267 Syllabus15Bhanu Pratap ReddyÎncă nu există evaluări
- The Scientific Revolution of The 16 TH and 17 TH CenturyDocument9 paginiThe Scientific Revolution of The 16 TH and 17 TH CenturyMa.Tricia GanaciasÎncă nu există evaluări
- Starseeds - Understanding Your Mission & Roles On Earth - Spiritual UniteDocument16 paginiStarseeds - Understanding Your Mission & Roles On Earth - Spiritual UniteAnna JacobÎncă nu există evaluări
- RM35TF30Document96 paginiRM35TF30Hossein Jalali MoghaddamÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)