S-ar putea să vă placă și
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- 2 LVL PDFDocument7 pagini2 LVL PDFakun gamingjÎncă nu există evaluări
- Three Level Paper IeeeDocument5 paginiThree Level Paper IeeekripanshÎncă nu există evaluări
- Nirsha2017 PDFDocument6 paginiNirsha2017 PDFnirshaÎncă nu există evaluări
- Exp 12 Single Phase Inverter Part IIDocument7 paginiExp 12 Single Phase Inverter Part IIusmpowerlabÎncă nu există evaluări
- 2016 - An Optimized Dual Inverter Configuration For Open End Winding Induction Motor Drive With Common Mode Voltage EliminationDocument5 pagini2016 - An Optimized Dual Inverter Configuration For Open End Winding Induction Motor Drive With Common Mode Voltage EliminationAdolfo Valdez BahenaÎncă nu există evaluări
- Generators in Parallel OperationDocument24 paginiGenerators in Parallel OperationRianne AguilarÎncă nu există evaluări
- ReportDocument83 paginiReportNikita SaxenaÎncă nu există evaluări
- DC-DC Converters Lab ManualDocument32 paginiDC-DC Converters Lab ManualShah SahadÎncă nu există evaluări
- Small Signal Amplifiers Eet3Document67 paginiSmall Signal Amplifiers Eet3Dan ChapsÎncă nu există evaluări
- Exp 2 Single-Phase Rect2Document6 paginiExp 2 Single-Phase Rect2usmpowerlabÎncă nu există evaluări
- Lecture-1 & 2Document27 paginiLecture-1 & 2ZestÎncă nu există evaluări
- Transformer ProtectionDocument33 paginiTransformer ProtectionSudhir JoshiÎncă nu există evaluări
- Expt No 7-SMPSDocument3 paginiExpt No 7-SMPSadityaÎncă nu există evaluări
- Lecture Three - Review of DC-AC InvertersDocument87 paginiLecture Three - Review of DC-AC InvertersShimelisÎncă nu există evaluări
- Electronics 1Document42 paginiElectronics 1Shanti Emmanuelle EscabarteÎncă nu există evaluări
- Design and Construction of Control System For Automatic Voltage StabilizerDocument6 paginiDesign and Construction of Control System For Automatic Voltage StabilizerEditor IJTSRDÎncă nu există evaluări
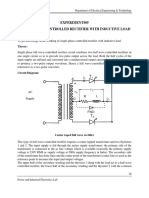
- Experiment#05 Single Phase Controlled Rectifier With Inductive LoadDocument4 paginiExperiment#05 Single Phase Controlled Rectifier With Inductive Loadkaleem ullahÎncă nu există evaluări
- Exp 1 Single-Phase Rect1Document9 paginiExp 1 Single-Phase Rect1usmpowerlabÎncă nu există evaluări
- Ee 791 Drives Lab MaualDocument39 paginiEe 791 Drives Lab MaualSiddhartha Ghosh100% (1)
- EL - 124 Electronic Devices & Circuits: Experiment # 06Document10 paginiEL - 124 Electronic Devices & Circuits: Experiment # 06Jawwad IqbalÎncă nu există evaluări
- DC Motor, Motor: DriverDocument28 paginiDC Motor, Motor: DriverLykaShanineGabrielMendozaÎncă nu există evaluări
- Lecture-8DC MachinesDocument55 paginiLecture-8DC MachinesBisrat TeferiÎncă nu există evaluări
- Experiment No 2 - LVDTDocument5 paginiExperiment No 2 - LVDTPRAMOD MAHAJANÎncă nu există evaluări
- Ee07lab Experiment AutotransformerDocument5 paginiEe07lab Experiment AutotransformerPido, Patricia LaineÎncă nu există evaluări
- STP 211 Practical-1-1-1-1-1Document25 paginiSTP 211 Practical-1-1-1-1-1Abdulaziz MuhammedÎncă nu există evaluări
- 5210 ManualDocument4 pagini5210 Manualhugo_cortes5275Încă nu există evaluări
- SolenoidDocument3 paginiSolenoidamitÎncă nu există evaluări
- Lab 4Document4 paginiLab 4ShahZaib AnwarÎncă nu există evaluări
- Multilevel InverterDocument16 paginiMultilevel InverterabdelbassetÎncă nu există evaluări
- Z Source ConverterDocument12 paginiZ Source Converterravirnjn88Încă nu există evaluări
- Chapter 7Document125 paginiChapter 7malathynarayaniÎncă nu există evaluări
- Control of Multi Level InverterDocument138 paginiControl of Multi Level InverterVenkata Ramdas BonamÎncă nu există evaluări
- EM2 - Lab - 1 Part 2Document4 paginiEM2 - Lab - 1 Part 2S M Nahidul IslamÎncă nu există evaluări
- Eguieron - Carlo - Experiment No.7 - Ee07labDocument6 paginiEguieron - Carlo - Experiment No.7 - Ee07labCarlo EguieronÎncă nu există evaluări
- Lab 2 PDFDocument7 paginiLab 2 PDFRoss LevineÎncă nu există evaluări
- Q 7) Explain The Basic Principle of Control in HVDCTDocument12 paginiQ 7) Explain The Basic Principle of Control in HVDCTrasashpujÎncă nu există evaluări
- Demystifying The Operational Transconductance Amplifier: Application ReportDocument13 paginiDemystifying The Operational Transconductance Amplifier: Application ReportCarlosVillavicencioGÎncă nu există evaluări
- Electronic Load Controller (BE Final Project)Document58 paginiElectronic Load Controller (BE Final Project)api-19919524Încă nu există evaluări
- 201ee235 VIDHARSHANA J MATLAB REPORTDocument5 pagini201ee235 VIDHARSHANA J MATLAB REPORTVIDHARSHANA JÎncă nu există evaluări
- 2stage VSIDocument6 pagini2stage VSIhismarcheÎncă nu există evaluări
- Transformer Based Resonant DC Inverter For Brushless DC Motor Drive SystemDocument7 paginiTransformer Based Resonant DC Inverter For Brushless DC Motor Drive SystemStudents Xerox ChidambaramÎncă nu există evaluări
- Zero Voltage Switching Resonant Power Devices by Bill AndrecakDocument28 paginiZero Voltage Switching Resonant Power Devices by Bill AndrecakRekhamtrÎncă nu există evaluări
- Current Loop Interface Module M 2025B: ControlsDocument8 paginiCurrent Loop Interface Module M 2025B: Controlsvnayak vikkyÎncă nu există evaluări
- Expt - 5 Lab ReportDocument7 paginiExpt - 5 Lab ReportSakshi GargÎncă nu există evaluări
- Slua 074Document10 paginiSlua 074armin rahmatiÎncă nu există evaluări
- Review Seluruh Materi Transformator: Teknik Elektro Universitas GunadarmaDocument46 paginiReview Seluruh Materi Transformator: Teknik Elektro Universitas GunadarmabayuindraÎncă nu există evaluări
- ELET 201 - Basic Industrial Electronics - Lab Manual - 2023Document140 paginiELET 201 - Basic Industrial Electronics - Lab Manual - 2023bandr almalkiÎncă nu există evaluări
- +-12 Volt DC Regulated SupplyDocument4 pagini+-12 Volt DC Regulated SupplyAakash SharmaÎncă nu există evaluări
- A High-Efficiency 3.3-kW Bidirectional On-Board ChargerDocument5 paginiA High-Efficiency 3.3-kW Bidirectional On-Board ChargerGabriel MejiaÎncă nu există evaluări
- LVDTDocument30 paginiLVDTDEEPA KUNWARÎncă nu există evaluări
- TransformersDocument36 paginiTransformersdurgaraoÎncă nu există evaluări
- DET40073 - Topic 4Document104 paginiDET40073 - Topic 4KuhaanPro100% (1)
- Design and Construction of A Low DC Voltage Power Supply UnitDocument28 paginiDesign and Construction of A Low DC Voltage Power Supply UnitRasaq Eneji Jimoh100% (1)
- Current Mode Integrated Control Technique For Z-Source Inverter Fed Induction Motor DrivesDocument8 paginiCurrent Mode Integrated Control Technique For Z-Source Inverter Fed Induction Motor DrivesRaghuraman RavishankarÎncă nu există evaluări
- Electronic Devices and Circuits (Lab) : Experiment No. 13: BJT Transistor As A SwitchDocument9 paginiElectronic Devices and Circuits (Lab) : Experiment No. 13: BJT Transistor As A SwitchPrince SamÎncă nu există evaluări
- Mz18a enDocument4 paginiMz18a enhoticeforuÎncă nu există evaluări
- Seminar ReportDocument23 paginiSeminar ReportvinaykumaarÎncă nu există evaluări
- Java String Interview Questions and Answers - JournalDevDocument51 paginiJava String Interview Questions and Answers - JournalDevHar Sha ChavaliÎncă nu există evaluări
- Sienr2014 31Document6 paginiSienr2014 31Har Sha ChavaliÎncă nu există evaluări
- Uddin2013 PDFDocument6 paginiUddin2013 PDFHar Sha ChavaliÎncă nu există evaluări
- Transmission Line Shunt and Series Compensation With Voltage Sensitive LoadsDocument18 paginiTransmission Line Shunt and Series Compensation With Voltage Sensitive LoadsHar Sha ChavaliÎncă nu există evaluări
- STARCHETYPE REPORT ReLOADED AUGURDocument5 paginiSTARCHETYPE REPORT ReLOADED AUGURBrittany-faye OyewumiÎncă nu există evaluări
- Managemant PrincipleDocument11 paginiManagemant PrincipleEthan ChorÎncă nu există evaluări
- Allegro Delivery Shipping Company Employment Application FormDocument3 paginiAllegro Delivery Shipping Company Employment Application FormshiveshÎncă nu există evaluări
- Empanelled Hospitals List Updated - 06-12-2022 - 1670482933145Document19 paginiEmpanelled Hospitals List Updated - 06-12-2022 - 1670482933145mechmaster4uÎncă nu există evaluări
- Paper II - Guidelines On The Use of DuctlessDocument51 paginiPaper II - Guidelines On The Use of DuctlessMohd Khairul Md DinÎncă nu există evaluări
- Carpentry Grade 8 Week 1 2Document20 paginiCarpentry Grade 8 Week 1 2SANTIAGO ALVISÎncă nu există evaluări
- Beautiful SpotsDocument2 paginiBeautiful SpotsLouise Yongco100% (1)
- IPS PressVest Premium PDFDocument62 paginiIPS PressVest Premium PDFLucian Catalin CalinÎncă nu există evaluări
- MSC ACFN2 RD4 ClassDocument25 paginiMSC ACFN2 RD4 Classmengistu jiloÎncă nu există evaluări
- VLSI Implementation of Floating Point AdderDocument46 paginiVLSI Implementation of Floating Point AdderParamesh Waran100% (1)
- Work Site Inspection Checklist 1Document13 paginiWork Site Inspection Checklist 1syed hassanÎncă nu există evaluări
- Caso Estudio: Reliability Analysis of Power Distribution System. A Case StudyDocument6 paginiCaso Estudio: Reliability Analysis of Power Distribution System. A Case StudyCarlos HernandezÎncă nu există evaluări
- VLT 6000 HVAC Introduction To HVAC: MG.60.C7.02 - VLT Is A Registered Danfoss TrademarkDocument27 paginiVLT 6000 HVAC Introduction To HVAC: MG.60.C7.02 - VLT Is A Registered Danfoss TrademarkSamir SabicÎncă nu există evaluări
- USDA List of Active Licensees and RegistrantsDocument972 paginiUSDA List of Active Licensees and Registrantswamu885Încă nu există evaluări
- Design Practical Eden Swithenbank Graded PeDocument7 paginiDesign Practical Eden Swithenbank Graded Peapi-429329398Încă nu există evaluări
- Aspek Perpajakan Dalam Transfer Pricing: Related PapersDocument15 paginiAspek Perpajakan Dalam Transfer Pricing: Related PapersHasrawati AzisÎncă nu există evaluări
- Ged 102 Mathematics in The Modern WorldDocument84 paginiGed 102 Mathematics in The Modern WorldKier FormelozaÎncă nu există evaluări
- Trading Journal TDA Branded.v3.5 - W - Total - Transaction - Cost - BlankDocument49 paginiTrading Journal TDA Branded.v3.5 - W - Total - Transaction - Cost - BlankChristyann LojaÎncă nu există evaluări
- Revised Corporation Code - Non Stock Close and Special CorporationsDocument19 paginiRevised Corporation Code - Non Stock Close and Special CorporationsVenziel PedrosaÎncă nu există evaluări
- VC AndrewsDocument3 paginiVC AndrewsLesa O'Leary100% (1)
- 16 Personalities ResultsDocument9 pagini16 Personalities Resultsapi-605848036Încă nu există evaluări
- New Microsoft Office Word DocumentDocument5 paginiNew Microsoft Office Word DocumentSukanya SinghÎncă nu există evaluări
- Advanced Physiotherapeutic SyllabusDocument1 paginăAdvanced Physiotherapeutic SyllabusAnup SharmaÎncă nu există evaluări
- ATAL Selected FDPs AY 2023 24Document15 paginiATAL Selected FDPs AY 2023 24parthiban palanisamy100% (2)
- Grasa LO 915Document2 paginiGrasa LO 915Angelo Carrillo VelozoÎncă nu există evaluări
- Rubber Band Arrangements - Concert BandDocument25 paginiRubber Band Arrangements - Concert BandJonatas Souza100% (1)
- Sanskrit Lessons: �丘��恆� � by Bhikshuni Heng HsienDocument4 paginiSanskrit Lessons: �丘��恆� � by Bhikshuni Heng HsiendysphunctionalÎncă nu există evaluări
- Dash 3000/4000 Patient Monitor: Service ManualDocument292 paginiDash 3000/4000 Patient Monitor: Service ManualYair CarreraÎncă nu există evaluări
- Thermodynamic c106Document120 paginiThermodynamic c106Драгослав БјелицаÎncă nu există evaluări
- Forces L2 Measuring Forces WSDocument4 paginiForces L2 Measuring Forces WSAarav KapoorÎncă nu există evaluări