S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Service ManualDocument582 paginiService ManualBogdan Popescu100% (5)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- C7 On-Highway Engine Electrical System: Harness and Wire Electrical Schematic SymbolsDocument2 paginiC7 On-Highway Engine Electrical System: Harness and Wire Electrical Schematic SymbolsFeDe Aavina Glez100% (3)
- Sanyo Denki̇ RS1 Driver ManualDocument303 paginiSanyo Denki̇ RS1 Driver Manualremus popescu100% (1)
- Spying From Space - Constructing America's Satellite Command and Control Systems (PDFDrive)Document230 paginiSpying From Space - Constructing America's Satellite Command and Control Systems (PDFDrive)MohammadÎncă nu există evaluări
- 01.introduction To Earth ScienceDocument29 pagini01.introduction To Earth ScienceIshan Chua100% (1)
- Contractor Hse Management ProgramDocument12 paginiContractor Hse Management ProgramAhmed IbrahimÎncă nu există evaluări
- An Introduction To EFTDocument24 paginiAn Introduction To EFTkunjammuÎncă nu există evaluări
- Blockchain Disruption in The Forex Trading MarketDocument64 paginiBlockchain Disruption in The Forex Trading MarketVijayKhareÎncă nu există evaluări
- E2000 Manual UK - CompressedDocument74 paginiE2000 Manual UK - CompressedAcubas100% (5)
- Yanmar Graafmachines SV17 PDFDocument10 paginiYanmar Graafmachines SV17 PDFAleksandar PetkovicÎncă nu există evaluări
- Quincy Qsi and QGD and QSV Parts ListDocument20 paginiQuincy Qsi and QGD and QSV Parts ListrobertÎncă nu există evaluări
- Wearable BiosensorsDocument16 paginiWearable BiosensorsShreehari Haridasan100% (1)
- vc34 Kompend e PDFDocument949 paginivc34 Kompend e PDFVIJAY KUMAR SAJJAÎncă nu există evaluări
- SHB 9300vector 0,37-90kW v6-2 ENDocument508 paginiSHB 9300vector 0,37-90kW v6-2 ENRodrigoÎncă nu există evaluări
- Combivert: GB Instruction Manual Housing EDocument42 paginiCombivert: GB Instruction Manual Housing EMr.K chÎncă nu există evaluări
- 00f5hezk100 AsclDocument24 pagini00f5hezk100 AsclMr.K chÎncă nu există evaluări
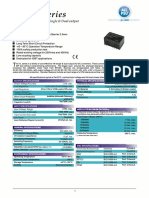
- Vl-1 W Series: Lwunregulated SingleDocument4 paginiVl-1 W Series: Lwunregulated SingleMr.K chÎncă nu există evaluări
- IPM (Intelligent Power Module) Industrial Inverter Operate at High Ambient Temperatures Up To 125°CDocument10 paginiIPM (Intelligent Power Module) Industrial Inverter Operate at High Ambient Temperatures Up To 125°CMr.K chÎncă nu există evaluări
- 616 PC5 Instruction ManualDocument150 pagini616 PC5 Instruction ManualMr.K chÎncă nu există evaluări
- 1N4001, 1N4002, 1N4003, 1N4004, 1N4005, 1N4006, 1N4007: Vishay General SemiconductorDocument5 pagini1N4001, 1N4002, 1N4003, 1N4004, 1N4005, 1N4006, 1N4007: Vishay General SemiconductorTanmaya Tapaswini TripathyÎncă nu există evaluări
- Instruction Manual: Dynamic Line IDocument44 paginiInstruction Manual: Dynamic Line IMr.K chÎncă nu există evaluări
- Ha466461u004 PDFDocument513 paginiHa466461u004 PDFagus sutrisnoÎncă nu există evaluări
- Ha 470595Document2 paginiHa 470595Hayden LovettÎncă nu există evaluări
- IPM (Intelligent Power Module) Industrial Inverter Operate at High Ambient Temperatures Up To 125°CDocument10 paginiIPM (Intelligent Power Module) Industrial Inverter Operate at High Ambient Temperatures Up To 125°CMr.K chÎncă nu există evaluări
- DSU Manual PDFDocument204 paginiDSU Manual PDFCarlos Alberto RuedaÎncă nu există evaluări
- Sinusifdv GB V301 R13-A5Document149 paginiSinusifdv GB V301 R13-A5Mr.K chÎncă nu există evaluări
- 15j0901b100 Remote Drive Iris Control v23x r01 enDocument119 pagini15j0901b100 Remote Drive Iris Control v23x r01 enMr.K chÎncă nu există evaluări
- 15j0901b100 Remote Drive Iris Control v23x r01 enDocument119 pagini15j0901b100 Remote Drive Iris Control v23x r01 enMr.K chÎncă nu există evaluări
- Manual Softstarter 3RW30 3RW40 en-USDocument204 paginiManual Softstarter 3RW30 3RW40 en-USrodrigomessiasÎncă nu există evaluări
- Sanmotion RDocument254 paginiSanmotion RMr.K chÎncă nu există evaluări
- 00f5neb0000 PDFDocument82 pagini00f5neb0000 PDFAldebran Yul Goncalves PolancoÎncă nu există evaluări
- Manual Softstarter 3RW30 3RW40 en-USDocument204 paginiManual Softstarter 3RW30 3RW40 en-USrodrigomessiasÎncă nu există evaluări
- Tosvert Vf-A7/P7 Serial Communication Function ManualDocument66 paginiTosvert Vf-A7/P7 Serial Communication Function ManualMr.K chÎncă nu există evaluări
- 15j0901b100 Remote Drive Iris Control v23x r01 enDocument119 pagini15j0901b100 Remote Drive Iris Control v23x r01 enMr.K chÎncă nu există evaluări
- Tosvert Vf-A7/P7 Serial Communication Function ManualDocument66 paginiTosvert Vf-A7/P7 Serial Communication Function ManualMr.K chÎncă nu există evaluări
- Yaskawa Servodrive 2series PDFDocument339 paginiYaskawa Servodrive 2series PDFPpgas PTÎncă nu există evaluări
- Inverter Manual PDFDocument255 paginiInverter Manual PDFRM HaroonÎncă nu există evaluări
- IPM (Intelligent Power Module) Industrial Inverter Operate at High Ambient Temperatures Up To 125°CDocument10 paginiIPM (Intelligent Power Module) Industrial Inverter Operate at High Ambient Temperatures Up To 125°CMr.K chÎncă nu există evaluări
- Parker SSD Drives 590PR Manual enDocument466 paginiParker SSD Drives 590PR Manual enMr.K chÎncă nu există evaluări
- Ideal Vs Real OttoDocument5 paginiIdeal Vs Real Ottoa7med SoulimanÎncă nu există evaluări
- Accommodating Expansion of Brickwork: Technical Notes 18ADocument13 paginiAccommodating Expansion of Brickwork: Technical Notes 18AWissam AlameddineÎncă nu există evaluări
- Haberman Data Logistic Regression AnalysisDocument5 paginiHaberman Data Logistic Regression AnalysisEvelynÎncă nu există evaluări
- Inglês - Degrees of ComparisonDocument4 paginiInglês - Degrees of ComparisonVersehgi IIÎncă nu există evaluări
- pm2 5 Sensor 201605Document6 paginipm2 5 Sensor 201605Vennela NandikondaÎncă nu există evaluări
- Analisa AgriculturalDocument6 paginiAnalisa AgriculturalFEBRINA SARLINDA, STÎncă nu există evaluări
- Literature Review On Parking SpaceDocument6 paginiLiterature Review On Parking Spacefvgy6fn3100% (1)
- Summative 1Document4 paginiSummative 1Nean YsabelleÎncă nu există evaluări
- BFISDocument1 paginăBFISEverestÎncă nu există evaluări
- Bibliography and FootnotesDocument2 paginiBibliography and FootnotesHannah de VeraÎncă nu există evaluări
- Introduction To Neutrino Physics: Paolo LipariDocument85 paginiIntroduction To Neutrino Physics: Paolo LipariSubhankar HowladerÎncă nu există evaluări
- Propositional LogicDocument41 paginiPropositional LogicMuneeb Javaid100% (1)
- NC Error PropagationDocument12 paginiNC Error PropagationSalman KhanÎncă nu există evaluări
- Rule Based ClassificationsDocument14 paginiRule Based ClassificationsAmrusha NaallaÎncă nu există evaluări
- CASBA Directive 2074Document17 paginiCASBA Directive 2074vijaycool85Încă nu există evaluări
- Evolis User ManualDocument28 paginiEvolis User ManualIonmadalin1000Încă nu există evaluări
- Exposure: The PhotoreactionDocument16 paginiExposure: The PhotoreactionGeetha ThiruvengadamÎncă nu există evaluări
- World Link YolaDocument3 paginiWorld Link YolaHamilton Obando100% (1)
- Kick-Ass Customer Service-Part 1Document3 paginiKick-Ass Customer Service-Part 1Mahfuzul Haque SujanÎncă nu există evaluări
- Evolution of Media INDUSTRIAL ERADocument16 paginiEvolution of Media INDUSTRIAL ERAAlec Ruht MasulaÎncă nu există evaluări
- Making Women's Medicine Masculine: OxpordDocument17 paginiMaking Women's Medicine Masculine: OxpordAdolfo Baqueiro100% (1)