S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5782)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Arduino-Based Underground Cable Fault Detection SystemDocument6 paginiArduino-Based Underground Cable Fault Detection SystemscribsunilÎncă nu există evaluări
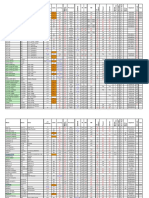
- Holes : Model Brand Name Cable Learning Processor IR RM KM Signature Year JP1 ConnectorDocument9 paginiHoles : Model Brand Name Cable Learning Processor IR RM KM Signature Year JP1 Connectormokracipa69100% (1)
- Series Magnetic-Latching Established Reliability To-5 RelaysDocument3 paginiSeries Magnetic-Latching Established Reliability To-5 RelaysmuaadhÎncă nu există evaluări
- LINC L471manualDocument20 paginiLINC L471manualFabio JuniorÎncă nu există evaluări
- 42VL963Document3 pagini42VL963supplier77Încă nu există evaluări
- Gmc-rm004 - En-P Kinetx 300 350 DrivesDocument46 paginiGmc-rm004 - En-P Kinetx 300 350 DrivesnegrinÎncă nu există evaluări
- MT8222Document13 paginiMT8222Glaucio Almeida100% (1)
- Network Analysis by Van Valkenburg Chap 5 Solution ManualDocument70 paginiNetwork Analysis by Van Valkenburg Chap 5 Solution ManualBilal Mobeen85% (96)
- Schematic Arduino NANO-V3-CH340G ATMEGA328PDocument1 paginăSchematic Arduino NANO-V3-CH340G ATMEGA328PDinung100% (4)
- Introduction To ProgammingDocument3 paginiIntroduction To ProgammingCikin KeChikÎncă nu există evaluări
- Digital Filters For Coherent Optical ReceiversDocument14 paginiDigital Filters For Coherent Optical ReceiversZainab FaydhÎncă nu există evaluări
- Elbit Systems Proposes UH-60 Upgrade for Colombian Air ForceDocument50 paginiElbit Systems Proposes UH-60 Upgrade for Colombian Air ForceJOSE NAVARROÎncă nu există evaluări
- Aircraft Lighting SystemDocument12 paginiAircraft Lighting SystemDavid DungÎncă nu există evaluări
- BRCIPRODUCTSDocument53 paginiBRCIPRODUCTSJaimasaÎncă nu există evaluări
- Optical CommunicationDocument3 paginiOptical CommunicationKrishan PandyaÎncă nu există evaluări
- Bs107a PDFDocument7 paginiBs107a PDFverÎncă nu există evaluări
- MINISHAKER ACCESSORIES GUIDEDocument7 paginiMINISHAKER ACCESSORIES GUIDEJenny Alejandra ValenciaÎncă nu există evaluări
- RET670 Test Report DifferentialDocument3 paginiRET670 Test Report Differentialzaheer29310% (1)
- Broadband Quantum-Dot Frequency-Modulated Comb LaserDocument12 paginiBroadband Quantum-Dot Frequency-Modulated Comb Laser18877544451Încă nu există evaluări
- Pop 820Document84 paginiPop 820PhoenixxLogÎncă nu există evaluări
- Matlab Assignment-02 SEM-II-2016-2017 PDFDocument6 paginiMatlab Assignment-02 SEM-II-2016-2017 PDFfarhanfendiÎncă nu există evaluări
- Hpcc2014 ProgramDocument44 paginiHpcc2014 ProgrampankajpandeylkoÎncă nu există evaluări
- Physics Unacademy Iconic NotesDocument52 paginiPhysics Unacademy Iconic NotesSANJAY J100% (2)
- Bandgap Reference, Schematic and Performance Parameter: by Vikram Dhole Under The Guidance of Dr.M.B.MaliDocument11 paginiBandgap Reference, Schematic and Performance Parameter: by Vikram Dhole Under The Guidance of Dr.M.B.MaliShaikh NadeemÎncă nu există evaluări
- IncuKit XL Advanced InstructionsDocument5 paginiIncuKit XL Advanced Instructionssandro CardosoÎncă nu există evaluări
- Single-phase Transformer TutorialDocument16 paginiSingle-phase Transformer TutorialBrian LiÎncă nu există evaluări
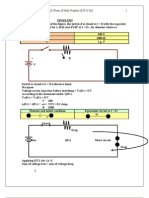
- Switch Realization Methods for DC-DC Converter ProblemsDocument2 paginiSwitch Realization Methods for DC-DC Converter ProblemsBraxt MwIra GibecièreÎncă nu există evaluări
- Pci Lab ManualDocument32 paginiPci Lab ManualrkshpatnaikÎncă nu există evaluări
- Heat Pump Boq Annex IDocument32 paginiHeat Pump Boq Annex IVishnu PrajapatiÎncă nu există evaluări