S-ar putea să vă placă și
- Autodesk Generative Design Capabilities For Machinery IndustriesDocument22 paginiAutodesk Generative Design Capabilities For Machinery IndustriesPuneethÎncă nu există evaluări
- AU-2017 Scheme & SyllabusDocument133 paginiAU-2017 Scheme & SyllabusPuneethÎncă nu există evaluări
- AU-2017 Scheme & SyllabusDocument133 paginiAU-2017 Scheme & SyllabusPuneethÎncă nu există evaluări
- AU-2017 Scheme & SyllabusDocument133 paginiAU-2017 Scheme & SyllabusPuneethÎncă nu există evaluări
- Check ListDocument80 paginiCheck ListAman KumarÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Protobuf TutorialDocument112 paginiProtobuf Tutorialvaram10Încă nu există evaluări
- F (X) Cos (X) + 2 Sin (X) + X: CPE 202 - Numerical MethodsDocument4 paginiF (X) Cos (X) + 2 Sin (X) + X: CPE 202 - Numerical Methodstae hoonÎncă nu există evaluări
- ACT Lab ManualDocument6 paginiACT Lab ManualkanjiaevÎncă nu există evaluări
- MCS 021 Data and File StructuresDocument22 paginiMCS 021 Data and File StructuresSumit RanjanÎncă nu există evaluări
- Python Functions ExerciseDocument8 paginiPython Functions ExercisesarandevÎncă nu există evaluări
- RecursionDocument20 paginiRecursionCrystalclear MkÎncă nu există evaluări
- Advance Python Full StackDocument12 paginiAdvance Python Full StackMirthipati Leela Durga KalyaniÎncă nu există evaluări
- UVM Quick Reference Guide: Author: Putta SatishDocument47 paginiUVM Quick Reference Guide: Author: Putta SatishRAJ NARNOLI0% (1)
- Datatypes Operators Control StatementsDocument22 paginiDatatypes Operators Control Statementsbhavana16686Încă nu există evaluări
- Tax JurisdictionDocument13 paginiTax JurisdictionabbasxÎncă nu există evaluări
- Abnormal Errors After ORA-1013 Received in ApplicationDocument2 paginiAbnormal Errors After ORA-1013 Received in ApplicationejgonzalezpÎncă nu există evaluări
- Menu - 634641185555058750 - CS4108 Operating System Lab AssignmentDocument4 paginiMenu - 634641185555058750 - CS4108 Operating System Lab AssignmentMahesh Borkar0% (1)
- SYSPRO MCQDocument5 paginiSYSPRO MCQSiddhant HandeÎncă nu există evaluări
- Project File Major Project Sandy2 PDFDocument41 paginiProject File Major Project Sandy2 PDFSandeep MishraÎncă nu există evaluări
- Glacier RaceDocument11 paginiGlacier RaceChufoP0% (1)
- SAS Certification Practice Exam - Base ProgrammingDocument18 paginiSAS Certification Practice Exam - Base ProgrammingArvind Shukla100% (1)
- A. 2451 B. 4950 C. 4851 D. 9900Document48 paginiA. 2451 B. 4950 C. 4851 D. 9900Jayesh Shinde0% (1)
- Operating Systems Chapter 10 Virtual Memory SlidesDocument53 paginiOperating Systems Chapter 10 Virtual Memory SlidesMatt SchnurÎncă nu există evaluări
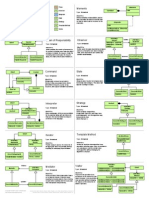
- Design Patterns CardDocument2 paginiDesign Patterns Cardjay161Încă nu există evaluări
- Gei 100682Document289 paginiGei 100682alaa fadhelÎncă nu există evaluări
- Introduction To Development With The Essbase Java APIDocument23 paginiIntroduction To Development With The Essbase Java APIAhamed Shafraz RaufÎncă nu există evaluări
- Oop Prac Group AssignmentDocument5 paginiOop Prac Group AssignmentdzedziphillyÎncă nu există evaluări
- Art Integrated ProjectDocument18 paginiArt Integrated ProjectSlim ShadyÎncă nu există evaluări
- JndiDocument76 paginiJndiBuddying TechieÎncă nu există evaluări
- jAVA SCRIPT Lua For IndicatorDocument3 paginijAVA SCRIPT Lua For IndicatorTheo MatacheÎncă nu există evaluări
- Guide To Web Application DevelopmentDocument4 paginiGuide To Web Application DevelopmentHaftamu HailuÎncă nu există evaluări
- Technical Aptitude QuestionDocument177 paginiTechnical Aptitude QuestionHARSHAD SONAWANEÎncă nu există evaluări
- Underground Cable FaultDocument8 paginiUnderground Cable FaultMohammad IrfanÎncă nu există evaluări
- C Data Types and Sizes: No Data Type Full Form Range of ValuesDocument2 paginiC Data Types and Sizes: No Data Type Full Form Range of ValuesNanda KumarÎncă nu există evaluări
- Parallel Computing IntroductionDocument36 paginiParallel Computing IntroductionajishalfredÎncă nu există evaluări