S-ar putea să vă placă și
- Enhanced Avionics System A Complete Guide - 2020 EditionDe la EverandEnhanced Avionics System A Complete Guide - 2020 EditionÎncă nu există evaluări
- FANS-1/A Datalink Communications Environment: Version 1.0 March 7, 2008Document27 paginiFANS-1/A Datalink Communications Environment: Version 1.0 March 7, 2008tayo_bÎncă nu există evaluări
- Session2 Item3 Honeywell Link 2000 Review 10-07-1Document17 paginiSession2 Item3 Honeywell Link 2000 Review 10-07-1mhaukom71Încă nu există evaluări
- Part 66 Module 5 SyllabusDocument2 paginiPart 66 Module 5 SyllabusamaiscÎncă nu există evaluări
- ARINCDocument9 paginiARINCShakil MahmudÎncă nu există evaluări
- Air Crash Investigations - Inadvertent In-Flight Slat Deployment - The Near Crash of China Eastern Airlines Flight 583De la EverandAir Crash Investigations - Inadvertent In-Flight Slat Deployment - The Near Crash of China Eastern Airlines Flight 583Încă nu există evaluări
- CAR 66 Module 5.10 Fibre OpticDocument25 paginiCAR 66 Module 5.10 Fibre OpticpontooÎncă nu există evaluări
- 2-1 - Introduction To ADS-BDocument19 pagini2-1 - Introduction To ADS-BMargaret MeporoÎncă nu există evaluări
- Ca Form 19-10 PDFDocument4 paginiCa Form 19-10 PDFPanneer SelvamÎncă nu există evaluări
- AvionicsDocument15 paginiAvionicsapi-238146174100% (2)
- Avionics Bus - DA - CPDocument31 paginiAvionics Bus - DA - CPM S Prasad100% (1)
- Arinc 429 629Document9 paginiArinc 429 629Parthiban A.PÎncă nu există evaluări
- Eurocae Ed-73e Minimum Operational Performance Specification For Secondary Surveillance Radar Mode S 201105Document718 paginiEurocae Ed-73e Minimum Operational Performance Specification For Secondary Surveillance Radar Mode S 201105IsaacÎncă nu există evaluări
- Basic Maintenance Experience Logbook For EASA Part 66 LicenseDocument54 paginiBasic Maintenance Experience Logbook For EASA Part 66 LicenseluigennaÎncă nu există evaluări
- EASA Module 4 SyllabusDocument2 paginiEASA Module 4 SyllabusPrabuddha ChakrabortyÎncă nu există evaluări
- 15 Thales ChevrelDocument28 pagini15 Thales ChevrelPanneer SelvamÎncă nu există evaluări
- ED35 & ED36: Auxiliary Flight Data Acquisition & Management UnitDocument2 paginiED35 & ED36: Auxiliary Flight Data Acquisition & Management UnitAnatoliyÎncă nu există evaluări
- EASA Module 05 Digital Techniques Mcq's by PDFDocument177 paginiEASA Module 05 Digital Techniques Mcq's by PDFHari HaranÎncă nu există evaluări
- ICAO Provisions On Data Link Implementation: Crystal KimDocument51 paginiICAO Provisions On Data Link Implementation: Crystal KimRicardo BenavidesÎncă nu există evaluări
- 12Document4 pagini12RzVaan ArfiÎncă nu există evaluări
- Avionics-Ae 2401: Unit - 1 Prepared by Rajarajeswari.M Mohammed Sathak Eng CollegeDocument129 paginiAvionics-Ae 2401: Unit - 1 Prepared by Rajarajeswari.M Mohammed Sathak Eng CollegeGaneshVijay0% (1)
- ARINC Protocol Tutorial Avionics Bus PDFDocument29 paginiARINC Protocol Tutorial Avionics Bus PDFasterix3679Încă nu există evaluări
- Easa Part 66 Module 6Document4 paginiEasa Part 66 Module 6PRASADÎncă nu există evaluări
- The EASA Part 66 LicenceDocument6 paginiThe EASA Part 66 LicenceখালিদহাসানÎncă nu există evaluări
- Flight Data Recorder Rule ChangeDocument7 paginiFlight Data Recorder Rule ChangeIgnacio ZupaÎncă nu există evaluări
- 02 - Basic - AhrsDocument40 pagini02 - Basic - AhrsGazi JayedÎncă nu există evaluări
- 9574 Manual On Implementation of A 300 M (1 000 FT) Vertical Separation Minimum Between FL 290 and FL 410 InclusiveDocument44 pagini9574 Manual On Implementation of A 300 M (1 000 FT) Vertical Separation Minimum Between FL 290 and FL 410 InclusiveMauro SolorzanoÎncă nu există evaluări
- 04 Aircraft Communications and NavigationDocument4 pagini04 Aircraft Communications and NavigationManuel Azabache GrandezÎncă nu există evaluări
- Multilateration (MLAT) Concept of Use: Internatonal Civil Aviation Organization Asia and Pacific OfficeDocument19 paginiMultilateration (MLAT) Concept of Use: Internatonal Civil Aviation Organization Asia and Pacific Officertomka100% (1)
- Acars: Aircraft Communications Addressing and Reporting SystemDocument21 paginiAcars: Aircraft Communications Addressing and Reporting Systemaeronautical rajas100% (1)
- JAA Airframe and Systems SyllabusDocument57 paginiJAA Airframe and Systems SyllabusMuhammad AbdullahÎncă nu există evaluări
- Module 05.digital Techniques: 05.01. Electronic Instrument SystemsDocument50 paginiModule 05.digital Techniques: 05.01. Electronic Instrument Systemsa panda100% (1)
- ACARS White PaperDocument8 paginiACARS White Paperjohn kasichÎncă nu există evaluări
- Module 05 Part 5Document8 paginiModule 05 Part 5Aviation WorldÎncă nu există evaluări
- Supplement To M6.11 - M7.07 EWIS - Fiber Optic Cabling On Commercial AircraftDocument94 paginiSupplement To M6.11 - M7.07 EWIS - Fiber Optic Cabling On Commercial Aircraftjamesclh100% (1)
- M05 Q&aDocument139 paginiM05 Q&aPatrick TongÎncă nu există evaluări
- EASADocument10 paginiEASAvivaboyÎncă nu există evaluări
- Wiley - Ground Studies For Pilots - Radio Aids Sixth Edition - 978!0!632-05573-9Document2 paginiWiley - Ground Studies For Pilots - Radio Aids Sixth Edition - 978!0!632-05573-9Omkar JituriÎncă nu există evaluări
- Electrostatic Sensitive DevicesDocument7 paginiElectrostatic Sensitive DevicesEgor85Încă nu există evaluări
- Avionics 2marks 1Document46 paginiAvionics 2marks 1Ar JunÎncă nu există evaluări
- Avionics System (AVS) Aboard ATR - 600: ATA104-I General Familiarization Training CourseDocument19 paginiAvionics System (AVS) Aboard ATR - 600: ATA104-I General Familiarization Training CourseWilson Carlos SombiniÎncă nu există evaluări
- Avionics Unit-2 PRINCIPLES: of Digital SystemsDocument144 paginiAvionics Unit-2 PRINCIPLES: of Digital SystemsVignesh Moorthy100% (3)
- Ano 15 RVSMDocument6 paginiAno 15 RVSMZain HasanÎncă nu există evaluări
- Traffic Alert and Collision Avoidance System (TCAS)Document57 paginiTraffic Alert and Collision Avoidance System (TCAS)Kaung MyatToeÎncă nu există evaluări
- Catalogue ATC MaintenanceDocument80 paginiCatalogue ATC MaintenanceSon NguyenÎncă nu există evaluări
- Dgca Module 10 Part 02Document11 paginiDgca Module 10 Part 02AnshuÎncă nu există evaluări
- A09 - DVCS 6100 - System PresentationDocument46 paginiA09 - DVCS 6100 - System PresentationqualproÎncă nu există evaluări
- F0E17150A08Document115 paginiF0E17150A08naserÎncă nu există evaluări
- Easa Basic Computer StructureDocument33 paginiEasa Basic Computer StructureAlaa MortadaÎncă nu există evaluări
- Abreviaturas AviacionDocument28 paginiAbreviaturas AviacionJorge VillagomezÎncă nu există evaluări
- 01-Fiches Atr600 enDocument4 pagini01-Fiches Atr600 enLg123_4Încă nu există evaluări
- ADS-B Technical IssueDocument12 paginiADS-B Technical Issuenxuannhu100% (1)
- ARINC 429 CommentaryDocument22 paginiARINC 429 CommentaryIsaac MoraÎncă nu există evaluări
- List of Abbreviations: On A/C AllDocument102 paginiList of Abbreviations: On A/C AllKaren NersisyanÎncă nu există evaluări
- 11 Equip+water+toiletDocument14 pagini11 Equip+water+toiletTharrmaselan manimaranÎncă nu există evaluări
- Software Management ControlDocument5 paginiSoftware Management ControlVeche AdrianaÎncă nu există evaluări
- BVA AirTrafficControl PDFDocument94 paginiBVA AirTrafficControl PDFD RAVINDRANÎncă nu există evaluări
- FDR Related and EGT Related InfoDocument10 paginiFDR Related and EGT Related InfoIrfan MuqtadirÎncă nu există evaluări
- Extended Abstract - Joao Freitas - FINALDocument10 paginiExtended Abstract - Joao Freitas - FINALSumathi ReddyÎncă nu există evaluări
- GetTradingDocument PDFDocument4 paginiGetTradingDocument PDFNavaraj BaniyaÎncă nu există evaluări
- What Is Value Investing?Document10 paginiWhat Is Value Investing?Navaraj BaniyaÎncă nu există evaluări
- Aircraft KMD CardDocument136 paginiAircraft KMD CardNavaraj BaniyaÎncă nu există evaluări
- Preparing CASH FLOW StatementDocument20 paginiPreparing CASH FLOW StatementNavaraj BaniyaÎncă nu există evaluări
- Propulsion EASA MOD 14Document1 paginăPropulsion EASA MOD 14Navaraj Baniya0% (1)
- EASA Module4Document102 paginiEASA Module4Navaraj Baniya100% (1)
- ServomechanismsDocument375 paginiServomechanismsNavaraj BaniyaÎncă nu există evaluări
- Ground HandlingDocument25 paginiGround HandlingNavaraj BaniyaÎncă nu există evaluări
- Easa Mod 5Document4 paginiEasa Mod 5Navaraj BaniyaÎncă nu există evaluări
- ElECTRONIC CKTSDocument544 paginiElECTRONIC CKTSNavaraj BaniyaÎncă nu există evaluări
- A.K. Sharma - Semiconductor Electronics (2008)Document274 paginiA.K. Sharma - Semiconductor Electronics (2008)Navaraj BaniyaÎncă nu există evaluări
- E LBP B Mcoq Mod 5Document21 paginiE LBP B Mcoq Mod 5Navaraj BaniyaÎncă nu există evaluări
- Synchro Appl GuideDocument5 paginiSynchro Appl GuideNavaraj BaniyaÎncă nu există evaluări
- Diodes and Their Properties: Experiment 7Document2 paginiDiodes and Their Properties: Experiment 7Navaraj BaniyaÎncă nu există evaluări
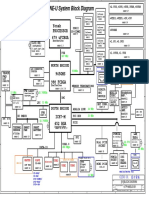
- Clevo M620ne-UDocument34 paginiClevo M620ne-UHh woo't hoofÎncă nu există evaluări
- Limak 2017 Annual ReportDocument122 paginiLimak 2017 Annual Reportorcun_ertÎncă nu există evaluări
- Process Control in SpinningDocument31 paginiProcess Control in Spinningapi-2649455553% (15)
- Ilovepdf Merged MergedDocument209 paginiIlovepdf Merged MergedDeepak AgrawalÎncă nu există evaluări
- E Insurance ProjectDocument10 paginiE Insurance ProjectChukwuebuka Oluwajuwon GodswillÎncă nu există evaluări
- GE Pricelist 2017Document2 paginiGE Pricelist 2017Rolando Cawaling100% (4)
- DualityDocument27 paginiDualitySuprabhat TiwariÎncă nu există evaluări
- Sd-1-Parts-Book Manual Propietario SpreaderDocument30 paginiSd-1-Parts-Book Manual Propietario Spreadergabriel sanchezÎncă nu există evaluări
- App 3.3 Scaffolding Measurement 20200512 FINALDocument15 paginiApp 3.3 Scaffolding Measurement 20200512 FINALharshkumar patelÎncă nu există evaluări
- Rankel Engine.Document16 paginiRankel Engine.Divya Prakash SrivastavaÎncă nu există evaluări
- MB m.2 Support Am4Document2 paginiMB m.2 Support Am4HhhhCaliÎncă nu există evaluări
- Isuzu 4hk1x Sheet HRDocument4 paginiIsuzu 4hk1x Sheet HRMuhammad Haqi Priyono100% (1)
- AK Carbon Steel PB 201307Document70 paginiAK Carbon Steel PB 201307SilveradoÎncă nu există evaluări
- KSB - Submersible Pump - Ama Porter 501 SEDocument30 paginiKSB - Submersible Pump - Ama Porter 501 SEZahid HussainÎncă nu există evaluări
- 3 3 1 Material Sorter Design ChallengeDocument3 pagini3 3 1 Material Sorter Design Challengeapi-343534512Încă nu există evaluări
- Brochure FDP - EG 16.08.2021-1-2-2Document3 paginiBrochure FDP - EG 16.08.2021-1-2-2sri sivaÎncă nu există evaluări
- 2ND 3RD Typical Floor Plan PDFDocument1 pagină2ND 3RD Typical Floor Plan PDFSamuel ZaraÎncă nu există evaluări
- By George G. Meyerhof, F. Asce: J. Geotech. Engrg., 1983, 109 (6) : 797-806Document10 paginiBy George G. Meyerhof, F. Asce: J. Geotech. Engrg., 1983, 109 (6) : 797-806PoYing HuangÎncă nu există evaluări
- Health Safety StatementDocument22 paginiHealth Safety StatementShafiqul IslamÎncă nu există evaluări
- Black Invention MythsDocument16 paginiBlack Invention MythsjoetylorÎncă nu există evaluări
- Paper AeroplaneDocument19 paginiPaper Aeroplanejkb SudhakarÎncă nu există evaluări
- Cloud Computing - Feb-Mar 2017Document40 paginiCloud Computing - Feb-Mar 2017Abhishek SinghÎncă nu există evaluări
- STOD-OTP-PMT-0805-HS-SPE-0001 Specification For Temporary Construction Camps and Ancillary FacilitiesDocument25 paginiSTOD-OTP-PMT-0805-HS-SPE-0001 Specification For Temporary Construction Camps and Ancillary Facilitiesjfl2096Încă nu există evaluări
- Electrical 02Document10 paginiElectrical 02Hary Kriz33% (3)
- 360-Pungue Iwrm Strategy PresentationDocument30 pagini360-Pungue Iwrm Strategy PresentationEdyz Piedadis PereiraÎncă nu există evaluări
- Peugeot 3008 BrochureDocument18 paginiPeugeot 3008 Brochuremihai12moveÎncă nu există evaluări
- Tailless AircraftDocument17 paginiTailless AircraftVikasVickyÎncă nu există evaluări
- OTM Reports FTI Training ManualDocument78 paginiOTM Reports FTI Training ManualAquib Khan100% (2)
- Republic Act No. 10913 - Anti-Distracted Driving ActDocument4 paginiRepublic Act No. 10913 - Anti-Distracted Driving Act...Încă nu există evaluări
- cjv30 Maintenance V10a PDFDocument101 paginicjv30 Maintenance V10a PDFEdu100% (1)