S-ar putea să vă placă și
- CHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsDocument6 paginiCHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsIzzat AzmanÎncă nu există evaluări
- Veterinary Radiography, A Workbook For Students (VetBooks - Ir) PDFDocument131 paginiVeterinary Radiography, A Workbook For Students (VetBooks - Ir) PDFDragos HodorÎncă nu există evaluări
- Control of Digital Systems: Automatic Control and System TheoryDocument54 paginiControl of Digital Systems: Automatic Control and System Theoryganeen hahgdhaÎncă nu există evaluări
- Control Systems: Spring 2003 Charles Brice University of South CarolinaDocument13 paginiControl Systems: Spring 2003 Charles Brice University of South CarolinaHasbulahZarkasyÎncă nu există evaluări
- Advanced Digital Control Syst EE554Document31 paginiAdvanced Digital Control Syst EE554Abdullah AloglaÎncă nu există evaluări
- Introduction To Discrete Time Control SystemDocument8 paginiIntroduction To Discrete Time Control SystemIzzat AzmanÎncă nu există evaluări
- Discrete-Time Controllers Structures and TuningDocument45 paginiDiscrete-Time Controllers Structures and Tuningskyrainbow123Încă nu există evaluări
- AI Pertemuan 4v2Document59 paginiAI Pertemuan 4v2muhammad iqbal samudraÎncă nu există evaluări
- EP 5511 - Lecture 01Document29 paginiEP 5511 - Lecture 01Solomon Tadesse AthlawÎncă nu există evaluări
- IPC Week 1 19022024 113005amDocument45 paginiIPC Week 1 19022024 113005amfatmanasir284Încă nu există evaluări
- Intro Digital ControlDocument25 paginiIntro Digital ControljoylyjellyÎncă nu există evaluări
- CHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsDocument6 paginiCHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsIzzat AzmanÎncă nu există evaluări
- 1 Introductory ConceptsDocument61 pagini1 Introductory ConceptsKhai Hua MinhÎncă nu există evaluări
- Unit 5 Discrete Control AnalysisDocument17 paginiUnit 5 Discrete Control AnalysisTenzin JamtshoÎncă nu există evaluări
- Unit 5 Discrete Control AnalysisDocument17 paginiUnit 5 Discrete Control AnalysisTenzin JamtshoÎncă nu există evaluări
- Discrete Systems Z TransfrmDocument5 paginiDiscrete Systems Z TransfrmAlie FavourÎncă nu există evaluări
- Lec1 PLCDocument11 paginiLec1 PLCMohammed EhabÎncă nu există evaluări
- Ogata Discrete-Time Control System - Chap1Document24 paginiOgata Discrete-Time Control System - Chap1f100% (1)
- Teknik Kendali Digital PDFDocument230 paginiTeknik Kendali Digital PDFWahyu Juliarto100% (3)
- Automatique Industrielle - M2 - Rv02Document28 paginiAutomatique Industrielle - M2 - Rv02Mohamed RouaÎncă nu există evaluări
- Chapter1 HandoutDocument37 paginiChapter1 HandoutMohammad Almoghabat AlmÎncă nu există evaluări
- Introduction To Digital Control SystemDocument20 paginiIntroduction To Digital Control SystemApril SurÎncă nu există evaluări
- EE 322 Control TheoryDocument37 paginiEE 322 Control TheoryshrnbolonneÎncă nu există evaluări
- DCS Chapter1Document71 paginiDCS Chapter1Qutayba YaseenÎncă nu există evaluări
- Lecture PPT Digital ControlDocument8 paginiLecture PPT Digital ControlFarwaÎncă nu există evaluări
- Digital Control Systems Introduction: Advanced ControlsDocument7 paginiDigital Control Systems Introduction: Advanced Controlsmanoman12345Încă nu există evaluări
- Digital Control: Ahmed Younis Ahmed 20140208Document21 paginiDigital Control: Ahmed Younis Ahmed 20140208Ahmed YounisÎncă nu există evaluări
- DCS 1Document17 paginiDCS 1Anna BrookeÎncă nu există evaluări
- Distributed Control Systems: Emad Ali Chemical Engineering Department King SAUD UniversityDocument24 paginiDistributed Control Systems: Emad Ali Chemical Engineering Department King SAUD UniversitynaeemfaysalÎncă nu există evaluări
- Lecture 1 Analog Vs DigitalDocument32 paginiLecture 1 Analog Vs DigitalPatric shingiÎncă nu există evaluări
- Control Systems U5 (TEL306)Document84 paginiControl Systems U5 (TEL306)Ruvenderan SuburamaniamÎncă nu există evaluări
- EECE 301 NS - 01 Overview PDFDocument6 paginiEECE 301 NS - 01 Overview PDFSergio Del CarpioÎncă nu există evaluări
- Unit 5Document23 paginiUnit 5shreyas shahÎncă nu există evaluări
- Lecture 1-IntroductionDocument22 paginiLecture 1-IntroductionShreyansh SaraswatÎncă nu există evaluări
- ch10 - ModifiedDocument125 paginich10 - ModifiedYato SenkaiÎncă nu există evaluări
- Distributed Control SystemsDocument24 paginiDistributed Control SystemsPraveen Madhusoodhanan100% (1)
- Pid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)Document28 paginiPid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)hiltoneng100% (1)
- Digital Electronics: What Is Digital Electronics? Importance of DE Types of SignalsDocument10 paginiDigital Electronics: What Is Digital Electronics? Importance of DE Types of SignalsWaagor KonaaleÎncă nu există evaluări
- ELG3336 Design of Mechatronics SystemDocument19 paginiELG3336 Design of Mechatronics SystemNive SBÎncă nu există evaluări
- IntroductionDocument18 paginiIntroductionBiniam TeferiÎncă nu există evaluări
- Pertemuan Ke 13 Akusisi DataDocument117 paginiPertemuan Ke 13 Akusisi DataKautsar KuzaÎncă nu există evaluări
- RTS ExamplesDocument13 paginiRTS ExamplesAmir HakimÎncă nu există evaluări
- M475 - c2 - L3 - Digital Control Systems - NotesDocument3 paginiM475 - c2 - L3 - Digital Control Systems - NotesAli AlmakhmariÎncă nu există evaluări
- Unit 5Document91 paginiUnit 5eie.vgnt2023Încă nu există evaluări
- DCS LectureDocument80 paginiDCS LectureShashankRajoria100% (3)
- DSP-SSP - Lecture 1Document24 paginiDSP-SSP - Lecture 1Alwin Neil A. CasañadaÎncă nu există evaluări
- Digital Signal Processing Mid1Document123 paginiDigital Signal Processing Mid1ANISH HALDERÎncă nu există evaluări
- Distributed Control System: Submitted By: Roll No:35 To 59Document35 paginiDistributed Control System: Submitted By: Roll No:35 To 59sningleÎncă nu există evaluări
- Lecture 12, Intro To Data Aquisition SystemDocument29 paginiLecture 12, Intro To Data Aquisition SystemMuhammadÎncă nu există evaluări
- An Introduction To Control and Digital Control Ideas: Control Problem Choosing The Input ChangingDocument15 paginiAn Introduction To Control and Digital Control Ideas: Control Problem Choosing The Input Changing02218177Încă nu există evaluări
- 1086616Document48 pagini1086616Anonymous MBapZd8Încă nu există evaluări
- PCI Module 5 PDFDocument35 paginiPCI Module 5 PDFjaya kingÎncă nu există evaluări
- Teknik Digital: Semester 3 by Darjat, ST.,MTDocument18 paginiTeknik Digital: Semester 3 by Darjat, ST.,MTtiwiwitÎncă nu există evaluări
- Design of Real-Time Control SystemsDocument9 paginiDesign of Real-Time Control SystemsHotland SitorusÎncă nu există evaluări
- Systems For Digital Signal Processing: 1 - IntroductionDocument21 paginiSystems For Digital Signal Processing: 1 - IntroductionBomber KillerÎncă nu există evaluări
- Sensing - Universal PID-Thermoregulator: Application Note AbstractDocument19 paginiSensing - Universal PID-Thermoregulator: Application Note Abstractnqdinh100% (2)
- Summer Training ReportDocument45 paginiSummer Training ReportPracheer SinghÎncă nu există evaluări
- Manual AutonicsDocument205 paginiManual Autonicsfey_tunerÎncă nu există evaluări
- Practical Data Acquisition for Instrumentation and Control SystemsDe la EverandPractical Data Acquisition for Instrumentation and Control SystemsÎncă nu există evaluări
- 0.047uf - 1uf 160V Variations K42Y-2 PIO Capacitors USSR NOS New - EbayDocument1 pagină0.047uf - 1uf 160V Variations K42Y-2 PIO Capacitors USSR NOS New - Ebayniko grigoratosÎncă nu există evaluări
- Solar Smart Street Light SystemDocument26 paginiSolar Smart Street Light Systemmayank100% (1)
- 01xa Automotive MP-A9 V4.0 Wireless ChargingDocument52 pagini01xa Automotive MP-A9 V4.0 Wireless ChargingAlamÎncă nu există evaluări
- YSGCU:031 - VER 6.02 (GN) : Generator Controller User ManualDocument10 paginiYSGCU:031 - VER 6.02 (GN) : Generator Controller User ManualRajKumar Patel100% (1)
- Electromechanical Systems and Mechatronics: Signal Conditioning: Lecture 3Document42 paginiElectromechanical Systems and Mechatronics: Signal Conditioning: Lecture 3cleytonmarques1991Încă nu există evaluări
- Vocational Training (SONU)Document11 paginiVocational Training (SONU)R SharmaÎncă nu există evaluări
- CM8340 Diagrama Fuente PDFDocument2 paginiCM8340 Diagrama Fuente PDFLorenzo100% (2)
- The Calculation of The Temperature Rise and Load Capability of Cable SystemsDocument13 paginiThe Calculation of The Temperature Rise and Load Capability of Cable SystemsRogelio Revetti100% (1)
- (Sanfoundry) Power Electronics 1. Questions & Answers On DiodesDocument7 pagini(Sanfoundry) Power Electronics 1. Questions & Answers On Diodeszelin99Încă nu există evaluări
- Service Manual: NSX-T99 NSX-T99EDocument21 paginiService Manual: NSX-T99 NSX-T99EGlaucia MachadoÎncă nu există evaluări
- Automatic Wash Basin Mirror Lamp ControllerDocument2 paginiAutomatic Wash Basin Mirror Lamp ControllerAdarsh RajÎncă nu există evaluări
- Speed Regulation An Induction Motor Using Reference Adaptive ControlDocument5 paginiSpeed Regulation An Induction Motor Using Reference Adaptive ControlAtakan OzturKÎncă nu există evaluări
- Laser Communication: Mini Project ReportDocument15 paginiLaser Communication: Mini Project ReportPrasannaKumarReddyKaturuÎncă nu există evaluări
- E-Choke Design UKDocument13 paginiE-Choke Design UKtehnotonÎncă nu există evaluări
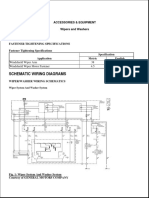
- 149 - Wipers and WashersDocument84 pagini149 - Wipers and WashersGedas GvildysÎncă nu există evaluări
- High Frequency Core CatalogueDocument40 paginiHigh Frequency Core CataloguePhùng TuấnÎncă nu există evaluări
- DPI 530 User ManualDocument45 paginiDPI 530 User ManualtrpsivaÎncă nu există evaluări
- REPLICAS of MEYER by Hydrocars - WATER As FUEL - Review of Available Technologies - MDG 2006-2007Document19 paginiREPLICAS of MEYER by Hydrocars - WATER As FUEL - Review of Available Technologies - MDG 2006-2007Steve MolkeÎncă nu există evaluări
- 4407 ADocument5 pagini4407 AMarincus AdrianÎncă nu există evaluări
- MAGNETISM: Magnetic Fields: Laboratory Report of Group 2Document32 paginiMAGNETISM: Magnetic Fields: Laboratory Report of Group 2MelbertÎncă nu există evaluări
- Continuity, Conservation, Stokes, and MaxwellDocument16 paginiContinuity, Conservation, Stokes, and MaxwellShahil AzmayishÎncă nu există evaluări
- WEG SSW 06 Soft Starter Usassw06 Brochure EnglishDocument6 paginiWEG SSW 06 Soft Starter Usassw06 Brochure EnglishBujar IbrahimiÎncă nu există evaluări
- DDJ-RB: DJ ControllerDocument48 paginiDDJ-RB: DJ ControllerSilvinho JúniorÎncă nu există evaluări
- Protection ChecklistDocument5 paginiProtection ChecklistkaranÎncă nu există evaluări
- TCD 094 DS4Document1 paginăTCD 094 DS4Ace Noah SomintacÎncă nu există evaluări
- Data Sheet ZenerDocument2 paginiData Sheet ZenerMeitaÎncă nu există evaluări
- Service Manual: History Information For The Following ManualDocument34 paginiService Manual: History Information For The Following ManualHamza AbbasiÎncă nu există evaluări
- M6 ReportDocument25 paginiM6 ReportMario David Gordillo BenavidesÎncă nu există evaluări
- Hitachi-HRL SeriesDocument13 paginiHitachi-HRL SeriesJose LopezÎncă nu există evaluări