S-ar putea să vă placă și
- Principal Intuitionistic Fuzzy Ideals and Filters On A LatticeDocument14 paginiPrincipal Intuitionistic Fuzzy Ideals and Filters On A LatticeDalia MuraddÎncă nu există evaluări
- Fuzzy and Quantum LogicDocument24 paginiFuzzy and Quantum LogicFlorinÎncă nu există evaluări
- Discrete Structures Set Theory: Duy BuiDocument8 paginiDiscrete Structures Set Theory: Duy BuiAwode TolulopeÎncă nu există evaluări
- Fuzzy Systems TheoryDocument32 paginiFuzzy Systems TheoryBMSÎncă nu există evaluări
- Fuzzy Logic and Fuzzy SetDocument29 paginiFuzzy Logic and Fuzzy Setagonafer ayeleÎncă nu există evaluări
- NetsDocument17 paginiNetsdgtv6rnyv4Încă nu există evaluări
- Rough Set On Concept LatticeDocument10 paginiRough Set On Concept LatticeAlexander DeckerÎncă nu există evaluări
- Math 198 - Research PaperDocument22 paginiMath 198 - Research PaperReymond AtienzaÎncă nu există evaluări
- Fuzzy SetDocument13 paginiFuzzy SetSoumya PaikÎncă nu există evaluări
- Fuzzy System: Soft ComputingDocument17 paginiFuzzy System: Soft ComputingAdidtya Perdana Eva RinantyÎncă nu există evaluări
- What is mathematical fuzzy logic: 夡 Petr HájekDocument7 paginiWhat is mathematical fuzzy logic: 夡 Petr HájekBatak TalentÎncă nu există evaluări
- Superfast Alghorithm MonothonicDocument0 paginiSuperfast Alghorithm MonothonicM0n3Încă nu există evaluări
- C C C C C CC: Zdzisław PawlakDocument51 paginiC C C C C CC: Zdzisław PawlakPetreus DumitruÎncă nu există evaluări
- Set Theory - Peter Koepke PDFDocument35 paginiSet Theory - Peter Koepke PDFandreÎncă nu există evaluări
- Fuzzy X (Set Theory + Logic) - MAH, 2013Document85 paginiFuzzy X (Set Theory + Logic) - MAH, 2013newmetroÎncă nu există evaluări
- Fuzzy X (Set Theory + Logic) - MAH, 2013Document85 paginiFuzzy X (Set Theory + Logic) - MAH, 2013newmetroÎncă nu există evaluări
- Implication in Intuitionistic Fuzzy and Interval-Valued Fuzzy Set TheoryDocument41 paginiImplication in Intuitionistic Fuzzy and Interval-Valued Fuzzy Set TheorymarijaasÎncă nu există evaluări
- Fuzzy Logic (PDFDrive)Document125 paginiFuzzy Logic (PDFDrive)Limen SANEÎncă nu există evaluări
- Bipolar Fuzzy A-Ideals of Bci-Algebras: Kyoung Ja Lee and Young Bae JunDocument12 paginiBipolar Fuzzy A-Ideals of Bci-Algebras: Kyoung Ja Lee and Young Bae JunmsmramansrimathiÎncă nu există evaluări
- 1 Motivation and Foreshadowing: C 2018 - Ivan KhatchatourianDocument6 pagini1 Motivation and Foreshadowing: C 2018 - Ivan KhatchatourianDouglasÎncă nu există evaluări
- Pred LogicDocument5 paginiPred LogicIsiaq Abdul-Azeez OlugbengaÎncă nu există evaluări
- Artificial IntelligenceDocument87 paginiArtificial IntelligenceAnustup GuptaÎncă nu există evaluări
- Fuzzy Logic IntroductionDocument11 paginiFuzzy Logic IntroductionAnonymous JZrVdcnhPRÎncă nu există evaluări
- CS Study Material PDFDocument164 paginiCS Study Material PDFAdhishÎncă nu există evaluări
- Rough Sets - Z. PawlakDocument51 paginiRough Sets - Z. PawlakGmkalyLinuxÎncă nu există evaluări
- Barwise FostDocument37 paginiBarwise FostIrena KrijanÎncă nu există evaluări
- Urbanik - A Brief Introduction To Schemes and SheavesDocument16 paginiUrbanik - A Brief Introduction To Schemes and SheavesVladimir EgorovÎncă nu există evaluări
- Fuzzy Intro 4Document7 paginiFuzzy Intro 4Binu Johnson Paul MalekudiyilÎncă nu există evaluări
- ESYE 562: Fuzzy Set Theory & Fuzzy MadmDocument75 paginiESYE 562: Fuzzy Set Theory & Fuzzy Madmİsmail KayahanÎncă nu există evaluări
- A Decision Procedure For Regular Expression EquivaDocument17 paginiA Decision Procedure For Regular Expression EquivakarthickÎncă nu există evaluări
- An Introduction To Fuzzy ControlDocument27 paginiAn Introduction To Fuzzy Controldali ramsÎncă nu există evaluări
- Functional Analysis NotesDocument93 paginiFunctional Analysis NotesfiaÎncă nu există evaluări
- Fuzzy LogicDocument104 paginiFuzzy LogicIllyas JanuÎncă nu există evaluări
- A Technique For Generating Relaxed Metrics by Means of Indistinguishability OperatorsDocument10 paginiA Technique For Generating Relaxed Metrics by Means of Indistinguishability OperatorsCarlos Rueda ArmengotÎncă nu există evaluări
- Classifications of Ultrametric Spaces According To RoundnessDocument12 paginiClassifications of Ultrametric Spaces According To RoundnessBob DylanÎncă nu există evaluări
- Introduction To Fuzzy LogicDocument68 paginiIntroduction To Fuzzy LogicIndukuri Venkata Subba LakshmiÎncă nu există evaluări
- Predicates and Quantifiers 45Document11 paginiPredicates and Quantifiers 45Sagar RawoolÎncă nu există evaluări
- An Informal Introduction To Topos Theory - Tom Leinster - 2011Document27 paginiAn Informal Introduction To Topos Theory - Tom Leinster - 2011seinundzeitÎncă nu există evaluări
- Fuzzy Metrics and Statistical Metric SpacesDocument9 paginiFuzzy Metrics and Statistical Metric SpacesbbeeÎncă nu există evaluări
- Section 1: Introduction: Figure 2-1Document10 paginiSection 1: Introduction: Figure 2-1shardapatelÎncă nu există evaluări
- Ch1 IntroductionDocument11 paginiCh1 IntroductionPBÎncă nu există evaluări
- Natural Parameter Form For Multivariate GaussianDocument17 paginiNatural Parameter Form For Multivariate GaussianAt GitsinÎncă nu există evaluări
- Fuzzy Logic-HIAST-5th-YearDocument83 paginiFuzzy Logic-HIAST-5th-Yearriadakaad2002Încă nu există evaluări
- Chapter B Probability Via Measure Theory: 1 Measurable SpacesDocument54 paginiChapter B Probability Via Measure Theory: 1 Measurable SpacesThiago FerreiraÎncă nu există evaluări
- NetsfiltersDocument17 paginiNetsfiltersSong LiÎncă nu există evaluări
- Soft Set ResultsDocument13 paginiSoft Set ResultsSundus AmirÎncă nu există evaluări
- Debre Markos University Burie Campus: Logic in Computer Science Group AssignmentDocument14 paginiDebre Markos University Burie Campus: Logic in Computer Science Group AssignmentMezigebu MeleseÎncă nu există evaluări
- Outer Measure and UtilityDocument8 paginiOuter Measure and Utilitymathematician7Încă nu există evaluări
- Lattice of A Fuzzy Prime Ideals in An Ordered SemigroupDocument5 paginiLattice of A Fuzzy Prime Ideals in An Ordered SemigroupIJAR JOURNALÎncă nu există evaluări
- Set Mathematics ProjectDocument38 paginiSet Mathematics ProjectVijay VijayÎncă nu există evaluări
- The Binary Entropy Function: ECE 7680 Lecture 2 - Definitions and Basic FactsDocument8 paginiThe Binary Entropy Function: ECE 7680 Lecture 2 - Definitions and Basic Factsvahap_samanli4102Încă nu există evaluări
- Set TheoryDocument94 paginiSet TheoryJavier Alfaro PastorÎncă nu există evaluări
- Fuzzy Logic - Retrieval of Data From DatabaseDocument7 paginiFuzzy Logic - Retrieval of Data From DatabaseiisteÎncă nu există evaluări
- SISSA Groups Course2017Document99 paginiSISSA Groups Course2017benhaddouchezakariaÎncă nu există evaluări
- Bodenhofer - Orderings of Fuzzy Sets Based On Fuzzy Orderings P1Document18 paginiBodenhofer - Orderings of Fuzzy Sets Based On Fuzzy Orderings P1SAAYAANTAAN NITÎncă nu există evaluări
- A Study of Fuzzy, Super Super Fuzzy Matrix TheoryDocument163 paginiA Study of Fuzzy, Super Super Fuzzy Matrix TheoryHemanth Kumar RajendakumarÎncă nu există evaluări
- Delphi Adapted Fuzzy Associative Memories (DAFAM) As A Multiple Expert System and Its Application To Study The Impacts of Climate Change On EnvironmentDocument4 paginiDelphi Adapted Fuzzy Associative Memories (DAFAM) As A Multiple Expert System and Its Application To Study The Impacts of Climate Change On EnvironmentijcnesÎncă nu există evaluări
- PQ Unit-IiDocument6 paginiPQ Unit-IimaherkamelÎncă nu există evaluări
- Attributes Data: Binomial and Poisson DataDocument31 paginiAttributes Data: Binomial and Poisson DatamaherkamelÎncă nu există evaluări
- Beyond Taguchi's Concept of The Quality Loss Function: Atul Dev, Pankaj JhaDocument5 paginiBeyond Taguchi's Concept of The Quality Loss Function: Atul Dev, Pankaj JhamaherkamelÎncă nu există evaluări
- Inspection, Quality Control, and Assurance SHEET (1) : 6-If The Mean Value of The Measured Stress Was 15 KG/MMDocument1 paginăInspection, Quality Control, and Assurance SHEET (1) : 6-If The Mean Value of The Measured Stress Was 15 KG/MMmaherkamelÎncă nu există evaluări
- The Quality Improvement Model: Is Process Capable?Document19 paginiThe Quality Improvement Model: Is Process Capable?maherkamelÎncă nu există evaluări
- ISO History (Brief) and Basic FactsDocument9 paginiISO History (Brief) and Basic FactsmaherkamelÎncă nu există evaluări
- Basic Chart ConceptsDocument13 paginiBasic Chart ConceptsmaherkamelÎncă nu există evaluări
- Pareto and QualityDocument1 paginăPareto and QualitymaherkamelÎncă nu există evaluări
- HW1 2Document2 paginiHW1 2maherkamelÎncă nu există evaluări
- Basics of Defining ProcessesDocument18 paginiBasics of Defining Processesmaherkamel100% (1)
- Me423 PDFDocument2 paginiMe423 PDFmaherkamelÎncă nu există evaluări
- Noc19 Ma08 Assignment13Document5 paginiNoc19 Ma08 Assignment13maherkamelÎncă nu există evaluări
- HW 1Document2 paginiHW 1maherkamelÎncă nu există evaluări
- Assignment-5 Noc18 Ma07 15Document6 paginiAssignment-5 Noc18 Ma07 15maherkamelÎncă nu există evaluări
- Me338 10Document2 paginiMe338 10maherkamelÎncă nu există evaluări
- Assignment-2 Noc18 Ma07 5Document9 paginiAssignment-2 Noc18 Ma07 5maherkamel100% (2)
- Art Unit Plan Exploring Shapes in ArtDocument13 paginiArt Unit Plan Exploring Shapes in Artapi-265643246Încă nu există evaluări
- Accumulative Difference Image ADI PDFDocument29 paginiAccumulative Difference Image ADI PDFMonique PadovanÎncă nu există evaluări
- Math Pre Board KeyDocument9 paginiMath Pre Board KeyAnndrea MendozaÎncă nu există evaluări
- 2 ProbabilityDocument16 pagini2 ProbabilityhfzhnÎncă nu există evaluări
- Probability Theory Masc467: Prof. Amina SalehDocument39 paginiProbability Theory Masc467: Prof. Amina SalehmadaÎncă nu există evaluări
- DLL Marriane Week 8Document10 paginiDLL Marriane Week 8Marriane Mendoza CabigaoÎncă nu există evaluări
- Central Philippine University: College of EngineeringDocument4 paginiCentral Philippine University: College of EngineeringJai GicangaoÎncă nu există evaluări
- White Box TestingDocument22 paginiWhite Box Testingm1214wÎncă nu există evaluări
- Coordinate SystemDocument7 paginiCoordinate SystemSarwar Hosen SimonÎncă nu există evaluări
- Worksheet of Linear Equation With One VariableDocument5 paginiWorksheet of Linear Equation With One VariablekristianasillyÎncă nu există evaluări
- IterMethBook 2ndedDocument567 paginiIterMethBook 2ndedFidkekd LeiÎncă nu există evaluări
- 7 CH 5 Set Theory PDFDocument66 pagini7 CH 5 Set Theory PDFtatiana chaconÎncă nu există evaluări
- CS112 Lecture01Document27 paginiCS112 Lecture01Manan ShahÎncă nu există evaluări
- Section 11-4 & 11-6 WorksheetDocument2 paginiSection 11-4 & 11-6 WorksheetsdenoyerÎncă nu există evaluări
- Mobile Communications HandbookDocument14 paginiMobile Communications HandbookSai RamÎncă nu există evaluări
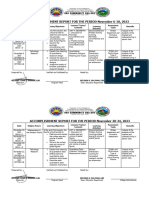
- Mike Ranada Accomplishment Report November 2023Document3 paginiMike Ranada Accomplishment Report November 2023MARICSON TEOPEÎncă nu există evaluări
- Math Quiz 1Document19 paginiMath Quiz 1Imeelyn ZamoraÎncă nu există evaluări
- Acfrogb0i3jalza4d2cm33ab0kjvfqevdmmcia - Kifkmf7zqew8tpk3ef Iav8r9j0ys0ekwrl4a8k7yqd0pqdr9qk1cpmjq Xx5x6kxzc8uq9it Zno Fwdrmyo98jelpvjb-9ahfdekf3cqptDocument1 paginăAcfrogb0i3jalza4d2cm33ab0kjvfqevdmmcia - Kifkmf7zqew8tpk3ef Iav8r9j0ys0ekwrl4a8k7yqd0pqdr9qk1cpmjq Xx5x6kxzc8uq9it Zno Fwdrmyo98jelpvjb-9ahfdekf3cqptbbÎncă nu există evaluări
- Arrays - Matrices and Vectors in Matlab, Freemat, Octave and Scilab by WWW - Freemat.infoDocument5 paginiArrays - Matrices and Vectors in Matlab, Freemat, Octave and Scilab by WWW - Freemat.inforodwellheadÎncă nu există evaluări
- HomeworkDocument2 paginiHomeworkGiang Ngô Thị ThuÎncă nu există evaluări
- Ee-Module 1 PDFDocument22 paginiEe-Module 1 PDFravitejÎncă nu există evaluări
- Solutions For Slope Stability Infinite SlopesDocument7 paginiSolutions For Slope Stability Infinite SlopesGuiller M Gumpad0% (1)
- Microsoft PowerPoint - Ee850 - 6!7!11Document5 paginiMicrosoft PowerPoint - Ee850 - 6!7!11Vibhuti NarayanÎncă nu există evaluări
- Numeracy Level Assessment Inventory (Pre-Test/ Grade Five) : ScoreDocument15 paginiNumeracy Level Assessment Inventory (Pre-Test/ Grade Five) : ScoreRemalyn BurgosÎncă nu există evaluări
- Lectures in Abstract Algebra (I. Basic Concepts) - Nathan JacobsonDocument226 paginiLectures in Abstract Algebra (I. Basic Concepts) - Nathan JacobsonAngelica Maria Abanto Vera83% (6)
- CPT BibbleDocument9 paginiCPT BibbleTrung PhanÎncă nu există evaluări
- Accuplacer Study GuideDocument84 paginiAccuplacer Study GuideJMC5053100% (1)
- GEC 4 Module 4 Final TermDocument86 paginiGEC 4 Module 4 Final TermMaria Ainor Jane BaldadoÎncă nu există evaluări
- Mtap Elimination ReviewerDocument15 paginiMtap Elimination ReviewerRosanna Jose Cuevas50% (2)
- WLP Week 7Document9 paginiWLP Week 7AVEGALE ULANÎncă nu există evaluări
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDe la EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessÎncă nu există evaluări
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziDe la Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziÎncă nu există evaluări
- Generative AI: The Insights You Need from Harvard Business ReviewDe la EverandGenerative AI: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDe la EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindÎncă nu există evaluări
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDe la EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveÎncă nu există evaluări
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldDe la EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldEvaluare: 4.5 din 5 stele4.5/5 (55)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceDe la EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceEvaluare: 5 din 5 stele5/5 (5)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldDe la EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldEvaluare: 4.5 din 5 stele4.5/5 (107)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceDe la EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceEvaluare: 4 din 5 stele4/5 (2)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesDe la EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesEvaluare: 4.5 din 5 stele4.5/5 (13)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)De la EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Evaluare: 5 din 5 stele5/5 (5)
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideDe la EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideEvaluare: 5 din 5 stele5/5 (1)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewDe la EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewEvaluare: 4.5 din 5 stele4.5/5 (104)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkDe la EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkEvaluare: 4 din 5 stele4/5 (7)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.De la EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Evaluare: 4 din 5 stele4/5 (15)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeDe la EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeEvaluare: 4.5 din 5 stele4.5/5 (69)
- Architects of Intelligence: The truth about AI from the people building itDe la EverandArchitects of Intelligence: The truth about AI from the people building itEvaluare: 4.5 din 5 stele4.5/5 (21)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)De la EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Evaluare: 4 din 5 stele4/5 (1)
- Artificial Intelligence: A Guide for Thinking HumansDe la EverandArtificial Intelligence: A Guide for Thinking HumansEvaluare: 4.5 din 5 stele4.5/5 (30)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsDe la EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsÎncă nu există evaluări
- The Age of AI: Artificial Intelligence and the Future of HumanityDe la EverandThe Age of AI: Artificial Intelligence and the Future of HumanityEvaluare: 3.5 din 5 stele3.5/5 (10)
- Fusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureDe la EverandFusion Strategy: How Real-Time Data and AI Will Power the Industrial FutureÎncă nu există evaluări