S-ar putea să vă placă și
- PC Engine / TurboGrafx-16 Architecture: Architecture of Consoles: A Practical Analysis, #16De la EverandPC Engine / TurboGrafx-16 Architecture: Architecture of Consoles: A Practical Analysis, #16Încă nu există evaluări
- Toy CarDocument23 paginiToy CarthreephasefaultÎncă nu există evaluări
- DIY Odometer ReprogrammingDocument21 paginiDIY Odometer ReprogrammingAriana ScheiderÎncă nu există evaluări
- I C Bus Sniffer: Entry Documentation A3808Document3 paginiI C Bus Sniffer: Entry Documentation A3808Vinay MohanÎncă nu există evaluări
- Exploring Arduino: Tools and Techniques for Engineering WizardryDe la EverandExploring Arduino: Tools and Techniques for Engineering WizardryEvaluare: 4.5 din 5 stele4.5/5 (5)
- Research Paper On Propeller ClockDocument6 paginiResearch Paper On Propeller Clockfzhfg156100% (1)
- Easy ESP8266 WiFi Debugging With PythonDocument5 paginiEasy ESP8266 WiFi Debugging With Pythonmarius_danila8736100% (1)
- O Melhor ProjetoDocument24 paginiO Melhor ProjetowgpgarciaÎncă nu există evaluări
- How To Build An Omni Wheels RobotDocument10 paginiHow To Build An Omni Wheels RobotJonty ChanduÎncă nu există evaluări
- Mitxela Com Projects CandleDocument19 paginiMitxela Com Projects CandleAanantha Karthik JBÎncă nu există evaluări
- Booting A PC: Read All About It..Document6 paginiBooting A PC: Read All About It..Harsha SrinivasÎncă nu există evaluări
- Mobile Car ComputerDocument9 paginiMobile Car ComputerembekhodaiÎncă nu există evaluări
- Simple 2 Way Motor Control For The ArduinoDocument6 paginiSimple 2 Way Motor Control For The ArduinoDália Rafaela Lopes da Costa PenhaÎncă nu există evaluări
- Analog Line FollowerDocument8 paginiAnalog Line FollowerRichard ArturoÎncă nu există evaluări
- Motherboard Repairing MethodDocument18 paginiMotherboard Repairing MethodRamdas KambleÎncă nu există evaluări
- Car Datta Logger Using OBD II Protocol Atmega 2560Document6 paginiCar Datta Logger Using OBD II Protocol Atmega 2560Marius DanilaÎncă nu există evaluări
- 3020 CNC + Arduino + GRBL + CNC Shield V3Document11 pagini3020 CNC + Arduino + GRBL + CNC Shield V3Segundo Santiago Cardenas VasquezÎncă nu există evaluări
- Arduino Tachometer: Part 1: IntroductionDocument10 paginiArduino Tachometer: Part 1: IntroductionDiego Mendoza AncallaÎncă nu există evaluări
- Build An LED Propeller ClockDocument4 paginiBuild An LED Propeller ClockImtiaz AhmedÎncă nu există evaluări
- Building An Arduino ROVDocument14 paginiBuilding An Arduino ROVDavid ClodeÎncă nu există evaluări
- Speed Control of DC Motor With 8051: Food Living Outside Play Technology WorkshopDocument7 paginiSpeed Control of DC Motor With 8051: Food Living Outside Play Technology WorkshopKarthik KadavaÎncă nu există evaluări
- T6963C LCD Device Driver LinuxDocument10 paginiT6963C LCD Device Driver LinuxAnonymous NZrcrgÎncă nu există evaluări
- How To Wire An Arduino Based 3 Axis CNC MachineDocument11 paginiHow To Wire An Arduino Based 3 Axis CNC MachineSetyo WidodoÎncă nu există evaluări
- A Cheap & Easy To Build CNC Machine For Drilling Pcbs PCB LotDocument15 paginiA Cheap & Easy To Build CNC Machine For Drilling Pcbs PCB LotJuanAntonioButronLlamocaÎncă nu există evaluări
- 4 CH DMX Dimmer: InstructablesDocument7 pagini4 CH DMX Dimmer: InstructablesCorrado BrianteÎncă nu există evaluări
- Arduino RobotDocument17 paginiArduino RobotMafas MunawfarÎncă nu există evaluări
- Modified Team Description Paper (TDP)Document10 paginiModified Team Description Paper (TDP)Sanyam AgarwalÎncă nu există evaluări
- Utsi HalleffectDocument13 paginiUtsi Halleffectsamsoum1Încă nu există evaluări
- Powertrain Tasks - : Sub-Juniors Practice TasksDocument6 paginiPowertrain Tasks - : Sub-Juniors Practice TasksAriana FrappeÎncă nu există evaluări
- Mirt BuildDocument5 paginiMirt BuildKomishinÎncă nu există evaluări
- Tutorial - How To Use Disk Drive StepperDocument9 paginiTutorial - How To Use Disk Drive StepperLiraJunior100% (1)
- TrackballDocument3 paginiTrackballHari Prasath T RÎncă nu există evaluări
- Macbook Pro Teardown GuideDocument9 paginiMacbook Pro Teardown Guidejdpardo100% (1)
- CPE 329 Final Project ReportDocument13 paginiCPE 329 Final Project ReportChris PolisÎncă nu există evaluări
- Yes We CAN BUS With Arduino in 30 SecondsDocument31 paginiYes We CAN BUS With Arduino in 30 SecondsAntonio Adalto AltomaniÎncă nu există evaluări
- Arduino Programable 5 Pedal Switcher: by CarranDocument20 paginiArduino Programable 5 Pedal Switcher: by CarranviniciusÎncă nu există evaluări
- Tuturial DIY Honda Odometer ReprogrammingDocument32 paginiTuturial DIY Honda Odometer Reprogrammingnicolas brizzioÎncă nu există evaluări
- Iot For The MintDocument28 paginiIot For The MintStefan NetzerÎncă nu există evaluări
- Kush Eq Controller SmallDocument23 paginiKush Eq Controller Smallkhat johnsonÎncă nu există evaluări
- What Is ECU RemapDocument19 paginiWhat Is ECU Remaprmnadam100% (6)
- Lab LCDDocument6 paginiLab LCDJesus Cotrina100% (1)
- 2.70 Arduino GRBL Instructions 2Document20 pagini2.70 Arduino GRBL Instructions 2Jefferson santosÎncă nu există evaluări
- DIY Coil WinderDocument7 paginiDIY Coil WinderWilson F SobrinhoÎncă nu există evaluări
- The Internet MonitorDocument24 paginiThe Internet MonitorFranco PalumboÎncă nu există evaluări
- Automatic Water Level Indicator and Pump Controller Using ArduinoDocument18 paginiAutomatic Water Level Indicator and Pump Controller Using ArduinoShishir ZamanÎncă nu există evaluări
- Macete tb6560Document9 paginiMacete tb6560junioratnÎncă nu există evaluări
- How To Make Your First RobotDocument51 paginiHow To Make Your First RobotSaurabh ChavanÎncă nu există evaluări
- How To Make Your First RobotDocument51 paginiHow To Make Your First RobotRenganathan KrishnanÎncă nu există evaluări
- How To Make Your First RobotDocument51 paginiHow To Make Your First RobotSuria Prasad சூரிய பிரசாத்Încă nu există evaluări
- How To Make Your First RobotDocument51 paginiHow To Make Your First RobotDhawal DeshpandeÎncă nu există evaluări
- Car PC - Installation 1Document10 paginiCar PC - Installation 1Tivua TiteoÎncă nu există evaluări
- Fire Fighting Robot Team: AbstractDocument8 paginiFire Fighting Robot Team: AbstractbindambÎncă nu există evaluări
- Brushless DC (BLDC) Motor With Arduino - Part 2Document8 paginiBrushless DC (BLDC) Motor With Arduino - Part 2Alessandro NzÎncă nu există evaluări
- Eddie's Ink Chip HackDocument6 paginiEddie's Ink Chip Hackusingteste100% (1)
- Traffic ControlDocument29 paginiTraffic ControlacroaliÎncă nu există evaluări
- (D) Iskette (O) RganDocument7 pagini(D) Iskette (O) RganFernando González BrestÎncă nu există evaluări
- RadioKot - Digital Soldering Station On PIC16F88x - PIC16F87x (A)Document11 paginiRadioKot - Digital Soldering Station On PIC16F88x - PIC16F87x (A)Costy45Încă nu există evaluări
- How To Make Your First RobotDocument51 paginiHow To Make Your First Robotbalajiboss005Încă nu există evaluări
- MHC gn88d - HCR gn88dDocument1 paginăMHC gn88d - HCR gn88dkietingÎncă nu există evaluări
- Seminar ReportDocument26 paginiSeminar ReportNeha Upadhyay100% (1)
- Beagle Bone SchematicDocument11 paginiBeagle Bone Schematictemp5556Încă nu există evaluări
- BR917058EN CYME72 NewFeaturesDocument4 paginiBR917058EN CYME72 NewFeaturesMiguel CbÎncă nu există evaluări
- Chapter - 1: Ece Department, AcoeDocument55 paginiChapter - 1: Ece Department, AcoeSana SriRamyaÎncă nu există evaluări
- IEEE Published Paper PICONDocument5 paginiIEEE Published Paper PICONamit vermaÎncă nu există evaluări
- RQ Series Battery Chargers User ManualDocument12 paginiRQ Series Battery Chargers User ManualaragornÎncă nu există evaluări
- EP3 Thermostat InstallDocument18 paginiEP3 Thermostat InstallmiguelÎncă nu există evaluări
- ControllerDocument3 paginiControllerAhmAd GhAziÎncă nu există evaluări
- RSSI and RX Levels TroubleshootDocument15 paginiRSSI and RX Levels TroubleshootPuneet Kumar100% (8)
- (Ess 5 e 12) - CatalogDocument1 pagină(Ess 5 e 12) - Catalogkabilan sadasivamÎncă nu există evaluări
- Nota VWDocument5 paginiNota VWGabrielÎncă nu există evaluări
- Power Supply and Ground Circuit Power Supply and Ground Circuit Wiring DiagramDocument9 paginiPower Supply and Ground Circuit Power Supply and Ground Circuit Wiring DiagramDavid QuispeÎncă nu există evaluări
- Introducing ION 8650Document1 paginăIntroducing ION 8650Anonymous FaqNSHEtÎncă nu există evaluări
- BESCOM - Part-V - Cost Data Sheets CompleteDocument84 paginiBESCOM - Part-V - Cost Data Sheets CompleteVardhan NadellaÎncă nu există evaluări
- Diagnostic Code List: Cerrar SISDocument3 paginiDiagnostic Code List: Cerrar SISHamilton MirandaÎncă nu există evaluări
- Radar Systems - Delay Line CancellersDocument7 paginiRadar Systems - Delay Line Cancellersgajjala rakeshÎncă nu există evaluări
- OpenSimwheel TutorialDocument33 paginiOpenSimwheel TutorialznamÎncă nu există evaluări
- CE Utilization For HuaweiDocument4 paginiCE Utilization For HuaweiAnonymous XKMLJK0uÎncă nu există evaluări
- LCDDocument11 paginiLCDNikhith Reddy100% (1)
- Slewing Controller SpecificationDocument7 paginiSlewing Controller SpecificationMohamed ElsayedÎncă nu există evaluări
- Philips TV 7607 Service ManualDocument257 paginiPhilips TV 7607 Service ManualPlayer NumberÎncă nu există evaluări
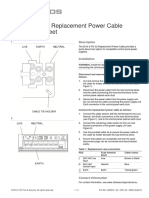
- 501-402803-1-20 (EN) R02 2010-2-PS-C2 Replacement Power Cable Installation SheetDocument2 pagini501-402803-1-20 (EN) R02 2010-2-PS-C2 Replacement Power Cable Installation SheetDanÎncă nu există evaluări
- Patch Zoom B2 - Fake FretlessDocument1 paginăPatch Zoom B2 - Fake FretlessMarcos ArthurÎncă nu există evaluări
- 50 - 100kV - AC Dielectric Test SetDocument4 pagini50 - 100kV - AC Dielectric Test SetlrpatraÎncă nu există evaluări
- Lenco Mes-202 enDocument10 paginiLenco Mes-202 enBenoni RaileanuÎncă nu există evaluări
- Silcopac D: Hardware SOFTWARE Basic Version BDocument2 paginiSilcopac D: Hardware SOFTWARE Basic Version BGerardo BaltaÎncă nu există evaluări
- ECE2280 Homework #1 Fall 2011: Use: Ignore R - V - 0.7, V 20+0.001sin (20t) I VXDocument11 paginiECE2280 Homework #1 Fall 2011: Use: Ignore R - V - 0.7, V 20+0.001sin (20t) I VXXxx CccÎncă nu există evaluări
- Diode Circuits: F. Astha EkadiyantoDocument25 paginiDiode Circuits: F. Astha EkadiyantoSatria JayadiÎncă nu există evaluări
- Schedule - Deep FreezersDocument10 paginiSchedule - Deep FreezersHamdiyya AbdullahiÎncă nu există evaluări