S-ar putea să vă placă și
- Laboratorio #02 Uso de Wireshark para Ver Las Unidades de Datos ProtocolarDocument5 paginiLaboratorio #02 Uso de Wireshark para Ver Las Unidades de Datos ProtocolarAnonymous xViiYStvÎncă nu există evaluări
- Comunicación Inalámbrica Con Módulos de RF de 433mhzDocument16 paginiComunicación Inalámbrica Con Módulos de RF de 433mhzankasi rey hhÎncă nu există evaluări
- PLC+S7-200+Ladder Español PDFDocument41 paginiPLC+S7-200+Ladder Español PDFGuillermoAlejandroCajalÎncă nu există evaluări
- PLCDocument41 paginiPLCAnonymous xViiYStvÎncă nu există evaluări
- Topicos Avanzados de AntenasDocument17 paginiTopicos Avanzados de AntenasJose Rafael CentenoÎncă nu există evaluări
- TeslaDocument19 paginiTeslaAnonymous xViiYStvÎncă nu există evaluări
- Segundo LabDocument21 paginiSegundo LabAnonymous xViiYStvÎncă nu există evaluări
- Programa - Sistemas de Telecomunicaciones CorregidoDocument6 paginiPrograma - Sistemas de Telecomunicaciones CorregidoAnonymous xViiYStvÎncă nu există evaluări
- Gprs ArduinoDocument39 paginiGprs ArduinoAnonymous xViiYStvÎncă nu există evaluări
- Tarea 1Document15 paginiTarea 1Anonymous xViiYStvÎncă nu există evaluări
- Tarea 1Document15 paginiTarea 1Anonymous xViiYStvÎncă nu există evaluări
- TX RedesDocument21 paginiTX RedesAnonymous xViiYStvÎncă nu există evaluări
- Introducción y Tipos de Sensores Pt100Document2 paginiIntroducción y Tipos de Sensores Pt100Anonymous xViiYStvÎncă nu există evaluări
- InternettDocument5 paginiInternettAnonymous xViiYStvÎncă nu există evaluări
- Laboratirio CircuitosDocument14 paginiLaboratirio CircuitosAnonymous xViiYStvÎncă nu există evaluări
- EncoderDocument6 paginiEncoderAnonymous xViiYStvÎncă nu există evaluări
- Sesión2. Diagrama de Procesos PDFDocument7 paginiSesión2. Diagrama de Procesos PDFAnonymous xViiYStvÎncă nu există evaluări
- Sesion 14 TPDocument27 paginiSesion 14 TPAnonymous xViiYStvÎncă nu există evaluări
- Sesion 15 TPDocument36 paginiSesion 15 TPAnonymous xViiYStvÎncă nu există evaluări
- Tema: Espectro DispersoDocument17 paginiTema: Espectro DispersoAnonymous xViiYStvÎncă nu există evaluări
- Sesión2. Diagrama de Procesos PDFDocument7 paginiSesión2. Diagrama de Procesos PDFAnonymous xViiYStvÎncă nu există evaluări
- Informe 2Document10 paginiInforme 2Anonymous xViiYStvÎncă nu există evaluări
- Gorder ADocument15 paginiGorder AR-paola Brithany ChangminÎncă nu există evaluări
- DsssDocument19 paginiDsssAnonymous xViiYStvÎncă nu există evaluări
- EncoderDocument6 paginiEncoderAnonymous xViiYStvÎncă nu există evaluări
- Sesión2. Diagrama de ProcesosDocument7 paginiSesión2. Diagrama de ProcesosAnonymous xViiYStvÎncă nu există evaluări
- EncoderDocument6 paginiEncoderAnonymous xViiYStvÎncă nu există evaluări
- ¿Qué Es La Fibra Óptica?Document15 pagini¿Qué Es La Fibra Óptica?Anonymous xViiYStvÎncă nu există evaluări
- Sesion 11 TPDocument38 paginiSesion 11 TPAnonymous xViiYStvÎncă nu există evaluări
- Algunos Aportes de Mario Crocco A La Neurobiología y Psicofísica - Contreras, Norberto C. - Rueda Editores (2014)Document162 paginiAlgunos Aportes de Mario Crocco A La Neurobiología y Psicofísica - Contreras, Norberto C. - Rueda Editores (2014)JournalEditor100% (1)
- Unidad 1. La Actividad Comercial de Las EmpresasDocument4 paginiUnidad 1. La Actividad Comercial de Las EmpresasbeatriztalaÎncă nu există evaluări
- Biosensores y BiomarcadoresDocument63 paginiBiosensores y BiomarcadoresMiguel AlfaroÎncă nu există evaluări
- Guia Met Caso Mantenimiento ElectrohidráulicoDocument5 paginiGuia Met Caso Mantenimiento ElectrohidráulicoRenato BerriosÎncă nu există evaluări
- u3EJERCICIO PRACTICO 4Document27 paginiu3EJERCICIO PRACTICO 4Vany LozanoÎncă nu există evaluări
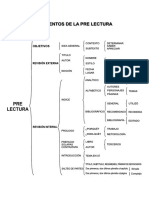
- Elementos de La Pre LecturaDocument1 paginăElementos de La Pre LecturaFernando YzfÎncă nu există evaluări
- AlimentaciónDocument8 paginiAlimentaciónFausto Snk GarcesÎncă nu există evaluări
- Parte TeoricaDocument17 paginiParte TeoricaMauricio Medrano MaciasÎncă nu există evaluări
- Examen - Actividad de Puntos Evaluables - Escenario 2 Segundo IntentoDocument6 paginiExamen - Actividad de Puntos Evaluables - Escenario 2 Segundo Intentojennifer sierraÎncă nu există evaluări
- 2019 09 06Document114 pagini2019 09 06Alejandro PanighettiÎncă nu există evaluări
- GASOMETRÍA - para CombinarDocument12 paginiGASOMETRÍA - para Combinarkotikokura15Încă nu există evaluări
- Caso 18 Pag 70 Ud 3Document1 paginăCaso 18 Pag 70 Ud 3Martina Asín CortésÎncă nu există evaluări
- Guía Disoluciones PDFDocument3 paginiGuía Disoluciones PDFAnonymous h5jsPk0zÎncă nu există evaluări
- Diapositivas Componente Sistema Fisico AmbientalDocument19 paginiDiapositivas Componente Sistema Fisico AmbientalSteven MahechaÎncă nu există evaluări
- Cuadro de Movimientos en Cada Segmento, Planos y EjesDocument2 paginiCuadro de Movimientos en Cada Segmento, Planos y EjesKarol Quiroz33% (3)
- LABORATORIO 10 - Sist Secuencial - Flip FlopDocument10 paginiLABORATORIO 10 - Sist Secuencial - Flip FlopJair Huapaya ParionaÎncă nu există evaluări
- Fundamentacion Ing CivilDocument12 paginiFundamentacion Ing Civilusuario2546Încă nu există evaluări
- La HormesisDocument7 paginiLa HormesisKanmen QingÎncă nu există evaluări
- 2° Grado - Junio 26Document26 pagini2° Grado - Junio 26Marisol Monsalve SanchezÎncă nu există evaluări
- Circulación Antes y Después Del NacimientoDocument3 paginiCirculación Antes y Después Del NacimientoAlfonso Castro100% (3)
- Descripcion LouDocument3 paginiDescripcion LoudanÎncă nu există evaluări
- El Dibujo Tecnico en Construciones Civiles-1er CursoDocument5 paginiEl Dibujo Tecnico en Construciones Civiles-1er CursoJulio Ruben Elizeche FloresÎncă nu există evaluări
- Prueba de HemoaglutinaciónDocument2 paginiPrueba de HemoaglutinaciónDaniel LgÎncă nu există evaluări
- Geoindicadores 2Document4 paginiGeoindicadores 2dila gonzalezÎncă nu există evaluări
- El Lenguaje Es Una Herramienta de Comunicación para AprenderDocument3 paginiEl Lenguaje Es Una Herramienta de Comunicación para AprendernoraÎncă nu există evaluări
- Experimentos y Experiencias SensorialesDocument13 paginiExperimentos y Experiencias Sensorialesed_parvularia_08Încă nu există evaluări
- Neuroplasticidad MaladaptativaDocument5 paginiNeuroplasticidad MaladaptativaMaria Laura RodriguezÎncă nu există evaluări
- Formato RadicadoDocument9 paginiFormato RadicadoEdimer CañonÎncă nu există evaluări
- RD 091 2020 Minem DgaamDocument3 paginiRD 091 2020 Minem DgaamManuel MirandaÎncă nu există evaluări
- CharlaeEgresado UNALMDocument22 paginiCharlaeEgresado UNALMRoxana DíazÎncă nu există evaluări