Documente Academic
Documente Profesional
Documente Cultură
Manual de Control Electrico
Încărcat de
Malena RodriguezDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Manual de Control Electrico
Încărcat de
Malena RodriguezDrepturi de autor:
Formate disponibile
Control Eléctrico
OBJETIVO:
Lograr que el alumno conozca y domine los elementos necesarios, básicos del control
eléctrico, utilizados en la industria local nacional e internacional, para que con la práctica
llegue a dominar uno de los campos de la automatización.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
LA SEGURIDAD EN EL TRABAJO.
Vamos a tratar de recoger las medidas necesarias, clasificadas según el ámbito de aplicación
de las mismas, para que el empresario, pueda garantizar la seguridad del trabajo en su
actividad. En el trabajo, se puede ver afectada la salud de muchas formas y todas ellas son
importantes. Se pueden generar daños como consecuencia de la carga de trabajo, ya sea
física o mental, y en general, de los factores psicosociales y organizativos capaces de generar
fatiga, estrés, insatisfacción laboral, etc. Para actuar sobre ellos contamos como
herramientas con la Ergonomía y la Psicosociología aplicada a la prevención de riesgos
laborales.
Las enfermedades contraídas como consecuencia del trabajo y que no estén contempladas
en dicho cuadro serán consideradas, a efectos legales, como accidentes de trabajo.
Desde el punto de vista técnico preventivo, se habla de enfermedad derivada del trabajo,
no de enfermedad profesional, entendiéndose como tal, aquel deterioro lento y paulatino
de la salud del trabajador, producido por una exposición crónica a situaciones adversas,
sean producidas por el ambiente en que se desarrolla el trabajo o por la forma en que éste
está organizado.
La Higiene Industrial es la técnica que nos ayudará a prevenir la aparición de enfermedades
profesionales, estudiando, valorando y modificando convenientemente el medio ambiente
físico, químico o biológico del trabajo.
El último tipo de daño como consecuencia de la materialización de los riesgos es el
accidente de trabajo. Es el indicador más inmediato y evidente de unas malas condiciones
de trabajo y dada su frecuencia y su gravedad, la lucha contra los accidentes es el primer
paso de toda actividad preventiva. Una diferencia básica frente a la enfermedad profesional
estaría en la velocidad de producción del daño.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Se define accidente de trabajo como "toda lesión corporal que el trabajador sufra con
ocasión o a consecuencia del trabajo que ejecuta por cuenta ajena". En esta definición se
incluyen tanto las lesiones que se producen en el centro de trabajo como aquellas
producidas en el trayecto habitual entre éste y el domicilio del trabajador. Estos últimos
serían los accidentes llamados "in itinere".
Desde el punto de vista técnico-preventivo, entenderemos por accidente de trabajo todo
suceso anormal, no querido ni deseado, que se presenta de forma brusca e inesperada y
normalmente es evitable, que interrumpe la continuidad del trabajo y puede causar lesiones
a las personas.
La Seguridad en el trabajo es el conjunto de técnicas y procedimientos que tienen por
objeto eliminar o disminuir el riesgo de que se produzcan los accidentes de trabajo.
TÉCNICAS DE SEGURIDAD
Se pueden clasificar atendiendo a diferentes aspectos, pero si tomamos como punto de
referencia el momento en que se produce el accidente, podemos establecer dos grupos.
Las técnicas activas son aquellas que planifican la prevención antes de que se produzca el
accidente. Para ello se identifican, en principio, los peligros existentes en los puestos de
trabajo y posteriormente se evalúan los riesgos e intentan controlarse mediante ajustes
técnicos y organizativos.
Entre estas técnicas podemos encontrar, por ejemplo, la evaluación de riesgos y las
inspecciones de seguridad, entre otras.
La evaluación de riesgos, es un proceso mediante el cual se obtiene la información necesaria
para que la organización esté en condiciones de tomar una decisión apropiada sobre la
oportunidad de adoptar acciones preventivas y, en tal caso, sobre el tipo de acciones que
deben adoptarse.
Esta evaluación se realizará llevando a cabo, en primer lugar un análisis cualitativo de
riesgos, encaminado a identificar y descubrir los riesgos existentes en un determinado
trabajo y posteriormente un análisis cuantitativo cuyo objetivo final es asignar un valor a la
peligrosidad de estos riesgos de forma que se puedan comparar y ordenar entre sí por su
importancia.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
La inspección de seguridad es básicamente un análisis que se realiza observando
directamente y de forma ordenada, las instalaciones y procesos productivos para evaluar
los riesgos de accidente presentes.
Las técnicas reactivas son aquellas técnicas que actúan una vez que se ha producido el
accidente e intentarán determinar las causas de éste para posteriormente proponiendo e
implantando unas medidas de control, evitar que se pueda volver a producir. Entre ellas
destacan la investigación de accidentes y el control estadístico de la accidentalidad.
La investigación de accidentes tiene como punto de arranque el propio accidente, y se
puede definir como la técnica utilizada para el análisis en profundidad de un accidente
laboral acaecido, a fin de conocer el desarrollo de los acontecimientos y determinar por qué
han sucedido.
La recopilación detallada de los accidentes es una valiosa fuente de información que es
conveniente aprovechar al máximo, para lo cual es importante que una serie de datos
referentes a ellos mismos y a su entorno queden registrados para su posterior análisis
estadístico que servirá para conocer la accidentalidad y sus circunstancias
comparativamente entre secciones, empresas o sectores productivos
SEGURIDAD EN INSTALACIONES ELÉCTRICAS
Hay que establecer las condiciones y garantías que deben reunir las instalaciones eléctricas,
conectadas a una tensión definida como baja, en relación entre otros aspectos a la
seguridad de las personas y de las cosas.
Su aplicación será obligatoria para:
a. Nuevas instalaciones, a sus modificaciones y a sus ampliaciones.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
b. Instalaciones existentes antes de su entrada en vigor que sean objeto de
modificaciones de importancia, reparaciones de importancia y a sus
ampliaciones.
c. Instalaciones existentes antes de su entrada en vigor, en lo referente al régimen
de inspecciones, si bien los criterios técnicos aplicables en dichas inspecciones
serán los correspondientes a la reglamentación con la que se aprobaron.
Se entenderá por modificaciones o reparaciones de importancia las que afectan a más del
50 por 100 de la potencia instalada. Igualmente se considerará modificación de importancia
la que afecte a líneas completas de procesos productivos con nuevos circuitos y cuadros,
aun con reducción de potencia.
Asimismo, se aplicará a las instalaciones existentes antes de su entrada en vigor, cuando su
estado, situación o características impliquen un riesgo grave para las personas o los bienes,
o se produzcan perturbaciones importantes en el normal funcionamiento de otras
instalaciones, a juicio del órgano competente de la Comunidad Autónoma.
TRABAJOS EN INSTALACIONES ELÉCTRICAS PRINCIPIOS BÁSICOS
a. Seguridad
Antes de llevar a cabo cualquier actividad relacionada con la instalación eléctrica o cualquier
trabajo con, o en proximidad de una instalación eléctrica, se debe hacer una evaluación de
los riesgos eléctricos que puedan presentarse.
b. Personal
Todos los trabajadores que intervengan en trabajos de una instalación eléctrica o en su
proximidad, recibirán una formación referente a las prescripciones de seguridad y las
normas de la empresa. La persona encargada de los trabajos deberá asegurarse el
cumplimiento de dichas prescripciones y normas de seguridad.
c. Organización
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Cada instalación eléctrica estará bajo la responsabilidad de una persona y el acceso a los
trabajadores a los lugares con riesgo eléctrico debe ser regulado.
Cuando los trabajos sean complejos, la preparación debe ser objeto de un documento
escrito, incluso se debe asegurar que un número suficiente de trabajadores son capaces de
aplicar los primeros auxilios.
d. Comunicaciones
Antes de comenzar cualquier trabajo, la persona designada como encargada de la
instalación será informada del trabajo a realizar. Nunca se debe autorizar el inicio de los
trabajos, ni la reconexión de la instalación eléctrica por medio de señales o por preacuerdos
en base a un intervalo de tiempo determinado.
e. Zona de trabajo
La zona de trabajo debe estar claramente definida y delimitada. No se deben colocar objetos
que puedan dificultar el acceso, ni materiales inflamables cerca de los equipos eléctricos.
f. Herramientas, equipos, y dispositivos
Deberán cumplir con las Normas Europeas, nacionales o internacionales apropiadas; se
utilizarán de acuerdo con las instrucciones y/o consejos dados por el fabricante.
g. Planos y expedientes
Los planos y expedientes se mantendrán disponibles y actualizados
h. Señalización
Si es necesario, se colocará una señalización para indicar los peligros más significados.
MANIOBRAS Y VERIFICACIONES
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
· MANIOBRAS
Son operaciones efectuadas para modificar el estado eléctrico de la instalación o para la
desconexión / reconexión de las instalaciones. Deben realizarse por personal
suficientemente formado.
· VERIFICACIONES
Comprende:
◦ Medidas: actividades destinadas a "medir" magnitudes físicas en una instalación
eléctrica. Se realizarán por trabajadores suficientemente formados o bajo la
vigilancia de uno de estos.
◦ Ensayos: actividades concebidas para verificar el funcionamiento o el estado
eléctrico de una instalación. Se realizarán por trabajadores suficientemente
formados o bajo la vigilancia de uno de estos.
◦ Inspecciones: actividades que aseguran que una instalación eléctrica está de
acuerdo con las reglamentaciones técnicas. Los resultados de las inspecciones se
deben documentar. Se realizarán por trabajadores suficientemente formados y con
experiencia de haberlas realizado en instalaciones semejantes.
PROCEDIMIENTOS DE TRABAJO
TRABAJOS SIN TENSIÓN
Para realizar trabajos sin tensión se deberán seguir las siguientes prescripciones esenciales
que aseguren que la instalación eléctrica en la zona de trabajo, está sin tensión y así se
mantendrá durante la realización del trabajo. Estas prescripciones de denominan
coloquialmente como "LAS CINCO REGLAS DE ORO"
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Después de haber sido identificadas las correspondientes instalaciones eléctricas, se
aplicarán los siguientes cinco requisitos esenciales, en el orden especificado:
1. Desconectar completamente. La parte de la instalación en la que se va a realizar el
trabajo debe desconectarse de todas las fuentes de alimentación. Los elementos de la
instalación eléctrica que mantengan tensión después de la desconexión deberán ser
descargados con dispositivos adecuados.
2. Asegurar contra la posible reconexión. Todos los dispositivos de maniobra que se han
utilizado para desconectar la instalación eléctrica deberán asegurarse contra cualquier
posible reconexión, preferentemente por bloqueo del mecanismo de maniobra.
3. Verificar que la instalación está sin tensión. La ausencia de tensión debe ser
verificada en todos los conductores activos de la instalación eléctrica en, o lo más cerca
posible, de la zona de trabajo. En el caso de instalaciones conectadas por cables, cuando
éstos no pueden ser identificados con exactitud en la zona de trabajo, se deben adoptar
otros medios para garantizar la seguridad, por ejemplo con la utilización de dispositivos
corta-cables o pica-cables adecuado.
4. Poner a tierra y en cortocircuito. En la zona de trabajo, de todas las instalaciones de
alta tensión y en algunas de baja tensión (cuando existe peligro de que la instalación se
ponga en tensión), todas aquellas partes de la instalación en las que se deba realizar un
trabajo deben ponerse a tierra y en cortocircuito. Los equipos o dispositivos de puesta a
tierra y en cortocircuito deben conectarse en primer lugar a la toma de tierra y a
continuación a los elementos a poner a tierra.
5. Protegerse frente a elementos próximos en tensión y establecer una señalización de
seguridad para delimitar la zona de trabajo. Si hay elementos de una instalación eléctrica
próximos a la zona de trabajo que no puedan dejarse sin tensión será necesaria la adopción
de especiales medidas de protección adicionales que se aplicarán antes de iniciar el trabajo
(trabajos en proximidad). Igualmente, se debe establecer una señalización para delimitar la
zona de trabajo.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
TRABAJOS EN TENSIÓN
Durante la ejecución de trabajos en tensión, los trabajadores pueden entrar en contacto
con elementos en tensión o penetrar en la zona de trabajos en tensión bien con una parte
de su cuerpo o bien con herramientas, equipos o dispositivos que manipulen. Solo se
llevarán a cabo trabajos en tensión una vez suprimidos los riesgos de incendio y explosión.
Los trabajadores utilizarán equipos de protección individual apropiados y no llevarán
objetos metálicos, tales como anillos, reloj, cadena, pulseras, etc., si ello implica riesgos.
Se distinguen tres métodos de trabajos en tensión:
1) Trabajo a distancia. El trabajador permanece a una distancia mínima
establecida de los elementos en tensión.
2) Trabajo en contacto. El trabajador ejecuta su trabajo con equipos de
protección individual y herramientas aislantes, en contacto directo con los
elementos en tensión.
3) Trabajo a potencial. El trabajador realiza su trabajo después de haberse
puesto a potencial.
Para la ejecución del trabajo se deberán tener en cuenta diversos factores tales como la
aptitud de los trabajadores para la realización de trabajos en tensión, las herramientas,
equipos y dispositivos, las distancias de trabajo, las condiciones ambientales, la
organización del trabajo.
TRABAJOS EN PROXIMIDAD
Trabajo durante el cual un trabajador penetra en un espacio delimitado alrededor de la zona
de trabajo en tensión.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Los trabajos en proximidad de elementos en tensión no se deben realizar a menos que las
medidas de seguridad garanticen que no se pueden tocar los elementos en tensión o que la
zona de trabajos en tensión no puede ser invadida.
Para controlar los riesgos eléctricos se pueden colocar como protección pantallas, barreras,
etc.
Para otros trabajos no eléctricos, tales como trabajos en andamios, pintura, trabajos con
equipos de elevación, etc., se debe mantener permanentemente una distancia que
garantice la seguridad de los trabajadores.
FUNCIÓN DEL CONTROL ELÉCTRICO.
Automatización es el uso de sistemas de control y de tecnología informática para reducir la
necesidad de la intervención humana en un proceso. En el enfoque de la industria,
automatización es el paso más allá de la mecanización en donde los procesos industriales
son asistidos por maquinas o sistemas mecánicos que reemplazan las funciones que antes
eran realizada por animales. Mientras en la mecanización los operadores son asistidos con
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
maquinaria a través de su propia fuerza y de su intervención directa, en la automatización
se reduce de gran manera la necesidad mental y sensorial del operador. De esta forma
presenta grandes ventajas en cuanto a producción más eficiente y disminución de riesgos
al operador.
Las principales ventajas de aplicar automatización a un proceso son:
• Reemplazo de operadores humanos en tareas repetitivas o de alto riesgo.
• Reemplazo de operador humano en tareas que están fuera del alcance de sus
capacidades como levantar cargas pesadas, trabajos en ambientes extremos o
tareas que necesiten manejo de una alta precisión
• Incremento de la producción. Al mantener la línea de producción automatizada,
las demoras del proceso son mínimas, no hay agotamiento o desconcentración
en las tareas repetitivas, el tiempo de ejecución se disminuye considerablemente
según el proceso.
La automatización de un nuevo producto requiere de una inversión inicial grande en
comparación con el costo unitario del producto, sin embargo mientras la producción se
mantenga constante esta inversión se recuperara, dándole a la empresa una línea de
producción con altos índice de ingresos.
HERRAMIENTAS DE AUTOMATIZACION.
Con la implementación de métodos numéricos en dispositivos de automatización el
resultado es una gama de aplicaciones de rápida expansión y de enfoque especializado en
la industria. La Tecnología asistida por computadora (CAx) ahora sirve de base para las
herramientas matemáticas y de organización utilizada para crear sistemas complejos.
Ejemplos notables de CAx incluyen el diseño asistido por computadora (CAD) y fabricación
asistida por ordenador (CAM). La mejora en el diseño, análisis, y la fabricación de productos
basados en CAx ha sido beneficiosa para la industria.
La tecnología informática, junto con los mecanismos y procesos industriales, pueden ayudar
en el diseño, implementación y monitoreo de sistemas de control. Un ejemplo de un sistema
de control industrial es un controlador lógico programable (PLC). Los PLC's están
especializados sincronizar el flujo de entradas de sensores y eventos con el flujo de salidas
a los actuadores y eventos. La Interfaz hombre-máquina (HMI) o interfaces hombre
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
computadora, se suelen utilizar para comunicarse con los PLC's y otros equipos. El personal
de servicio se encarga del seguimiento y control del proceso a través de los HMI, en donde
no solo puede visualizar el estado actual proceso sino también hacer modificaciones a
variables críticas del proceso.
TEORÍA DE CIRCUITOS.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
LA LEY DE OHM
La Ley de Ohm, es una de las leyes fundamentales de la electrodinámica, estrechamente
vinculada a los valores de las unidades básicas presentes en cualquier circuito eléctrico como
son:
1. Tensión o voltaje "E", en volt (V).
2. Intensidad de la corriente " I ", en ampere (A).
3. Resistencia "R" en ohm ( ) de la carga o consumidor conectado al circuito.
Circuito eléctrico cerrado compuesto por una pila de 1,5 volt, una resistencia o carga eléctrica "R"
y la. Circulación de una intensidad o flujo de corriente eléctrica " I " suministrado por la propia
pila.
Debido a la existencia de materiales que dificultan más que otros el paso de la corriente
eléctrica a través de los mismos, cuando el valor de su resistencia varía, el valor de la
intensidad de corriente en ampere también varía de forma inversamente proporcional. Es
decir, a medida que la resistencia aumenta la corriente disminuye y, viceversa, cuando la
resistencia al paso de la corriente disminuye la corriente aumenta, siempre que para ambos
casos el valor de la tensión o voltaje se mantenga constante.
Por otro lado y de acuerdo con la propia Ley, el valor de la tensión o voltaje es directamente
proporcional a la intensidad de la corriente; por tanto, si el voltaje aumenta o disminuye, el
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
amperaje de la corriente que circula por el circuito aumentará o disminuirá en la misma
proporción, siempre y cuando el valor de la resistencia conectada al circuito se mantenga
constante.
POSTULADO GENERAL DE LA LEY DE OHM
El flujo de corriente en ampere que circula por un circuito eléctrico cerrado, es
directamente proporcional a la tensión o voltaje aplicado, e inversamente proporcional a
la resistencia en ohm de la carga que tiene conectada.
FÓRMULA MATEMÁTICA GENERAL DE REPRESENTACIÓN DE LA LEY DE OHM
Desde el punto de vista matemático el postulado anterior se puede representar por medio
de la siguiente Fórmula General de la Ley de Ohm:
VARIANTE PRÁCTICA:
Aquellas personas menos relacionadas con el despeje de fórmulas matemáticas pueden
realizar también los cálculos de tensión, corriente y resistencia correspondientes a la Ley de
Ohm, de una forma más fácil utilizando el siguiente recurso práctico:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Con esta variante sólo será necesario tapar con un dedo la letra que representa el valor de la
incógnita que queremos conocer y de inmediato quedará indicada con las otras dos letras cuál
es la operación matemática que será necesario realizar.
HALLAR EL VALOR EN OHM DE UNA RESISTENCIA
Para calcular, por ejemplo, el valor de la resistencia "R" en ohm de una carga conectada a un
circuito eléctrico cerrado que tiene aplicada una tensión o voltaje "V" de 1,5 volt y por el cual
circula el flujo de una corriente eléctrica de 500 miliampere (mA) de intensidad, procedemos
de la siguiente forma:
Tapamos la letra “R” (que representa el valor de la incógnita que queremos despejar, en este
caso la resistencia "R" en ohm) y nos queda representada la operación matemática que
debemos realizar:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Como se puede observar, la operación matemática que queda indicada será: dividir el valor de
la tensión o voltaje "V", por el valor de la intensidad de la corriente " I " , en ampere (A) . Una
vez realizada la operación, el resultado será el valor en ohm de la resistencia "R" .
En este ejemplo específico tenemos que el valor de la tensión que proporciona la fuente de fuerza
electromotriz (FEM) (el de una batería en este caso), es de 1,5 volt, mientras que la intensidad de
la corriente que fluye por el circuito eléctrico cerrado es de 500 miliampere (mA).
Como ya conocemos, para trabajar con la fórmula es necesario que el valor de la intensidad
esté dado en ampere, sin embargo, en este caso la intensidad de la corriente que circula por
ese circuito no llega a 1 ampere. Por tanto, para realizar correctamente esta simple operación
matemática de división, será necesario convertir primero los 500 miliampere en ampere, pues
de lo contrario el resultado sería erróneo. Para efectuar dicha conversión dividimos 500 mA
entre 1000:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Como vemos, el resultado obtenido es que 500 miliampere equivalen a 0,5 ampere, por lo que
procedemos a sustituir, seguidamente, los valores numéricos para poder hallar cuántos ohm
tiene la resistencia del circuito eléctrico con el que estamos trabajando, tal como se muestra a
continuación:.
Como se puede observar, el resultado de la operación matemática arroja que el valor de la
resistencia "R" conectada al circuito es de 3 ohm.
HALLAR EL VALOR DE INTENSIDAD DE LA CORRIENTE
Veamos ahora qué ocurre con la intensidad de la corriente eléctrica en el caso que la
resistencia "R", en lugar de tener 3 ohm, como en el ejemplo anterior, tiene ahora 6 ohm. En
esta oportunidad la incógnita a despejar sería el valor de la corriente " I ", por tanto tapamos
esa letra:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
A continuación sustituimos “V” por el valor de la tensión de la batería (1,5 V) y la “R” por
el valor de la resistencia, o sea, 6 . A continuación efectuamos la operación matemática
dividiendo el valor de la tensión o voltaje entre el valor de la resistencia.
En este resultado podemos comprobar que la resistencia es inversamente proporcional al
valor de la corriente, porque cuando el valor de "R" aumenta de 3 a 6 ohm, la intensidad "
I " de la corriente también, varía, pero disminuyendo su valor de 0, 5 a 0,25 ampere.
HALLAR EL VALOR DE LA TENSIÓN O VOLTAJE
Ahora, para hallar el valor de la tensión o voltaje "V" aplicado a un circuito, siempre que
se conozca el valor de la intensidad de la corriente " I " en ampere que lo recorre y el valor
en ohm de la resistencia "R" del consumidor o carga que tiene conectada, podemos seguir
el mismo procedimiento tapando en esta ocasión la "V”, que es la incógnita que
queremos despejar.
A continuación sustituyendo los valores de la intensidad de corriente " I " y de la resistencia
"R" del ejemplo anterior y tendremos:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
El resultado que obtenemos de esta operación de multiplicar será 1,5 V, correspondiente a la
diferencia de potencial o fuerza electromotriz (FEM), que proporciona la batería conectada al
circuito.
Los más entendidos en matemáticas pueden utilizar directamente la Fórmula General de la
Ley de Ohm realizando los correspondientes despejes para hallar las incognitas. Para hallar el
valor de la intensidad "I" se emplea la representación matemática de la fórmula general de
esta Ley:
De donde:
I – Intensidad de la corriente que recorre el circuito en ampere (A)
E – Valor de la tensión, voltaje o fuerza electromotriz en volt (V)
R – Valor de la resistencia del consumidor o carga conectado al circuito en ohm ( ).
Si, por el contrario, lo que deseamos es hallar el valor de la resistencia conectada al circuito,
despejamos la “R” en la fórmula de la forma siguiente:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Y por último, para hallar la tensión despejamos la fórmula así y como en los casos anteriores,
sustituimos las letras por los correspondientes valores conocidos:
FÓRMULAS ELÉCTRICAS.
Suma de resistencias en serie
Donde RT: es la resistencia total del circuito; Rn: es el número total de ellas. Suma
de resistencias en paralelo
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Donde RT: es la resistencia total del circuito; Rn: es el número total de ellas.
Suma de capacidades o condensadores en serie
Donde CT: es la capacidad total del circuito; Cn: es el número total de condensadores.
Suma de capacidades o condensadores en paralelo
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Donde CT: es la capacidad total del circuito; Cn: es el número total de condensadores.
EL RELÉ
PRINCIPIO DE FUNCIONAMIENTO
Un relé es un interruptor accionado por un electroimán.
Un electroimán está formado por una barra de hierro dulce, llamada núcleo, rodeada por
una bobina de hilo de cobre. Al pasar una corriente eléctrica por la bobina el núcleo de
hierro se magnetiza por efecto del campo magnético producido por la bobina,
convirtiéndose en un imán tanto más potente cuanto mayor sea la intensidad de la
corriente y el número de vueltas de la bobina. Al abrir de nuevo el interruptor y dejar de
pasar corriente por la bobina, desaparece el campo magnético y el núcleo deja de ser un
imán.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
TIPOS DE RELÉS
El relé que hemos visto hasta ahora funciona como un interruptor. Está formado por un
contacto móvil o polo y un contacto fijo. Pero también hay relés que funcionan como un
conmutador, porque disponen de un polo (contacto móvil) y dos contactos fijos
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Cuando no pasa corriente por la bobina el contacto móvil está tocando a uno de los
contactos fijos. En el momento que pasa corriente por la bobina, el núcleo atrae al inducido,
el cual empuja al contacto móvil hasta que toca al otro contacto fijo (el de la derecha). Por
tanto, funciona como un conmutador.
También existen relés con más de un polo (contacto móvil) siendo muy interesantes para
los proyectos de Tecnología los relés conmutadores de dos polos y los de cuatro polos.
CONTROL DE UN MOTOR MEDIANTE RELÉ
En muchos proyectos de Tecnología es necesario controlar el giro, en ambos sentidos, de
un pequeño motor eléctrico de corriente contínua. Dicho control puede hacerse con una
llave de cruce o con un conmutador doble, pero también podemos hacerlo con un relé,
como veremos a continuación.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Observa la Fig. La bobina del relé se ha conectado a la pila a través de un pulsador NA
(normalmente abierto) que designamos con la letra P. El motor se ha conectado a los
contactos fijos del relé del mismo modo que si se tratase de un conmutador doble. Los dos
polos del relé se conectan a los bornes de la pila.
En esta situación al motor le llega la corriente por el borne derecho y le sale por el izquierdo,
girando en sentido anti horario.
Al accionar el pulsador P suministramos corriente a la bobina del relé, haciendo ésta que
los contactos móviles cambien de posición, con lo cual la corriente le llega al motor por su
borne izquierdo y le sale por el derecho, girando en sentido horario.
El tipo de control descrito tiene dos inconvenientes:
a) el motor no se para nunca
b) hay que mantener accionado el pulsador para que el motor gire en uno de los dos
sentidos.
El problema de parar el motor automáticamente se soluciona mediante interruptores
finales de carrera, accionados por el elemento móvil (por ejemplo, una puerta corredera).
Dichos interruptores deben colocarse en los cables que conectan el motor con el relé, de
manera que corten la corriente del motor en el momento adecuado.
Para no tener que estar accionando de forma contínua el pulsador hay dos posibilidades:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
a) Utilizar un interruptor en lugar de un pulsador. Esta solución nos obliga a controlar el
motor desde un solo lugar (donde esté el interruptor).
b) Modificar el circuito que conecta la bobina con la pila, mediante lo que se llama circuito
de enganche del relé. Como veremos, esta solución nos permite controlar el motor desde
dos puntos diferentes, lo cual es necesario en algunos casos, como por ejemplo si
queremos poder abrir y cerrar una puerta de garaje tanto desde dentro como desde fuera
del mismo.
CIRCUITO DE ENGANCHE o ENCLAVE
El circuito de enganche consiste en establecer un camino alternativo para que le siga
llegando corriente a la bobina cuando dejemos de accionar el pulsador. Para ello,
necesitamos que el relé tenga, al menos, un polo más de los que necesitemos para controlar
el el dispositivo que sea (motor, bombilla, etc), ya que es a través de uno de los polos del relé
como la bobina seguirá recibiendo corriente cuando dejemos de accionar el pulsador.
Para comprender mejor en qué consiste el circuito de enganche, supongamos que
queremos controlar el encendido de una bombilla mediante un relé de dos polos y cuatro
contactos. Utlizaremos una pila para suministrar corriente a la bobina y otra para hacerlo a
la bombilla, para que el esquema del circuito sea más claro. Tambien hemos señalado con
línea más gruesa los cables del circuito de enganche.
Podemos observar que la corriente procedente del borne positivo de la pila puede llegarle
a la bobina a través del cable que tiene el pulsador P1 (de tipo NA) y a través del cable que
conecta el borne positivo de la pila con uno de los polos del relé, así como del cable que
conecta el contacto abierto correspondiente a ese polo con el terminal de entrada de la
bobina. Este segundo camino es el circuito de enganche que, como podemos observar,
incluye un pulsador P2, de tipo NC (normalmente cerrado) cuya función veremos a
continuación.
Al accionar el pulsador P1 la bobina se activará y los contactos móviles del relé
cambiarán de posición, cerrándose, por una parte, el circuito de la bombilla y, por otra, el
circuito de enganche.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Para mantener encendida la bombilla no es necesario que permanezca accionado el
pulsador P1, ya que si dejamos de actuar sobre él la bobina seguirá recibiendo corriente a
través del circuito de enganche.
Cuando queramos apagar la bombilla (Fig. 14) tendremos que accionar un instante el
pulsador P2, con objeto de abrir el circuito de enganche y, por tanto, cortar la corriente de
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
la bobina. De esta forma, una vez soltado el pulsador P2 nos encontraremos de nuevo en la
situación representada en la Fig.
De esta mnera hemos controlado el encendido y apagado de una bombilla, accionando un
instante el pulsador P1 para encenderla y accionando otro instante el pulsador P2 para
apagarla.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
CIRCUITO DE CONTROL PARA PUERTA DE GARAJE
Como aplicación de todo lo visto vamos a diseñar un circuito que nos controle la apertura y
el cierre de una puerta de garaje. La puerta podrá abrirse tanto desde dentro, como desde
fuera del garaje, mediante el accionamiento de un pulsador determinado. El motor de
accionamiento del mecanismo de apertura/cierre de la puerta deberá pararse
automáticamente cuando la puerta esté completamente abierta o cerrada.
Para controlar un motor en los dos sentidos de giro mediante un relé con circuito de
enganche necesitamos que éste tenga, al menos, tres polos y seis contactos. Pero si sólo
disponemos de relés conmutadores de dos polos, tendremos que utilizar dos relés, como
se muestra en la Figura.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
El relé R1 tiene la función de cerrar el circuito que alimenta la bobina del relé R2. A su vez,
el circuito que alimenta la bobina del relé R1 puede cerrarse mediante el pulsador P1e
(exterior) o mediante el pulsador P1i (interior) ya que están conectados en paralelo, así
como por el circuito de enganche, que también dispone de dos pulsadores, P2e (exterior) y
P2i (interior), aunque en este caso de tipo NC.
El relé R2 tiene la función de controlar el sentido de giro del motor M, cuya parada
automática se producirá gracias a los finales de carrera FA (final de apertura) y FC (final
de cierre).
Hay que tener cuidado de colocar el final de carrera FC (final de cierre) en el cable que
alimenta al motor cuando el relé está desactivado, ya que la puerta estará la mayor parte
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
del tiempo cerrada. De esta manera los relés R1 y R2 sólo estarán activados durante el
tiempo de apertura.
El funcionamiento del circuito es el siguiente:
1º. Partimos de la situación representada en la Fig. 15, es decir, con la puerta cerrada y, por
tanto, FC pulsado.
2º. Para abrir la puerta, accionaremos P1e si estamos fuera del garage, o P1i si estamos en
el interior. Al accionar cualquiera de los dos pulsadores, activaremos el relé R1, que
permanecerá activado incluso después de soltar el pulsador, gracias al circuito de enganche,
que ahora estará cerrado (Fig. 16). También se habrá cerrado el circuito que alimenta a la
bobina del relé R2, que se activará y hará que el motor gire en el sentido en que abre la
puerta, hasta que esté completamente abierta, momento en el que pulsará el final de
carrera FA y el motor se detendrá.
3º. Para cerrar la puerta, accionaremos el pulsador P2i o P2e, según que estemos dentro
o fuera del garaje, con lo que se abrirá el circuito de enganche, se desactivará el relé R1 y,
por tanto, también se desactivará el relé R2, haciendo que el motor gire en el sentido en
que cierra la puerta, hasta que ésta se encuentre cerrada del todo, momento en el
pulsará el final de carrera FC y el motor se detendrá, volviéndonos a encontrar en el
estado de la Fig
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
MAQUINAS ELÉCTRICAS. (MOTORES, AC, DC Y GENERADORES)
TIPOS DE ARRANQUES DE MOTOR.
Hay varios tipos de arranques de motor, cada uno con sus peculiaridades y su motivo, en
esta ocasión vamos a ver los más empleados en la industria.
ARRANQUE ESTRELLA Y TRIÁNGULO
Las conexiones de un motor son muy sencillas de realizar, para ello el fabricante dispone
en la carcasa del motor de una caja de conexiones con 6 bornes, en donde nosotros
haremos las conexiones pertinentes, dependiendo de si deseamos una conexión tipo
estrella o una conexión tipo triángulo. Veámoslo con unos gráficos
¿Pero cómo se hacen éstas conexiones en la caja de bornes? Fácil, mirar éstos dos gráficos:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Ahora bien, puede ser que nos interese hacer, mediante contactores, un cambio de
conexión estrella-triángulo, en ese caso solo tenemos que conectar la salida de los
contactores a la caja de bornes.
Diagrama de Potencia.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Diagrama de control.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
NOTA: cambia le tipo de diagrama a tipo escalera americano.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
El esquema nos explica, empezando desde arriba, que el circuito tiene tres fusibles F3, un
relé térmico F2,que se utiliza para proteger el motor, y que tiene 3 contactores KM1, KM2
y KM3. Además, si comparamos los dos esquemas, veremos que el esquema de maniobra
incorpora un temporizador KA1 y dos interruptores S1 y S2. Además, en el esquema de
maniobra, entre KM2 y KM3, está representado el enclavamiento mecánico, es el
triángulo que une las dos bobinas de los contactores con líneas discontinuas, no es
obligatorio dibujarlo, porque un poco más arriba está representado el enclavamiento
eléctrico, son los dos contactos que están inmediatamente después de KA1.
Explicación de la maniobra:
1. S1
Si pulsamos sobre S1 tenemos la conexión en estrella, porque entran en funcionamiento
KM1, KM2 y KA1. Transcurrido un tiempo, pasamos a la conexión en triángulo por medio
del temporizador KA1, se activa KM3 y se desactiva KM2. Recordar, el temporizador debe
activarse cuando se alcance el 80% de la velocidad nominal del motor.
2. S2
Es el interruptor de paro. Desconecta a KM1, KM3 y KA1. Se inicia el paro del motor, lleva
una inercia.
Este tipo de arranque se utiliza para limitar la intensidad absorbida en Es el interruptor de
paro. Desconecta a KM1, KM3 y KA1. Se inicia el paro del motor, lleva un inercial
momento de arranque del motor. Si disponemos de un motor de 220 V y lo conectamos,
en primer lugar, en estrella, tendremos una tensión de 127 V, con la cual, obtendríamos
una intensidad 2 veces la nominal. En cambio, si lo hacemos directamente, tendríamos
una intensidad de 5 veces la nominal. Al conectar primero en estrella y después en
triángulo, mediante un temporizador, reducimos el sufrimiento del bobinado al rebajar la
intensidad de absorción.
En la actualidad existen unos equipos llamados arrancadores estrella-triángulo que
realizan este cometido de forma mucho más exacta, pues, lo ideal es que se realice el
cambio de estrella a triángulo cuando el motor haya alcanzado el 80% de su velocidad
nominal.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
ARRANQUE CON RESISTENCIAS ESTATÓRICAS.
Este tipo de arranque se utiliza para reducir la intensidad de arranque. El funcionamiento
es similar al anterior expuesto. Es decir, en una primera instancia, entran en
funcionamiento las resistencias y en una segunda instancia, el motor es alimentado
directamente. Para este proceso se utiliza dos contactores y un temporizador.
Las particularidades más interesantes son que las resistencias tienen un número limitado
de arranques cada X tiempo, que debe ser señalado por el propio fabricante. La ventaja
que tiene este tipo de arranque, es que no hay una caída de tensión, algo que si sucede
con el arranque estrella-triángulo. Se utiliza en motores que deben accionar máquinas con
un par bajo en su arranque.
Diagrama de Potencia.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Diagrama de control.
NOTA: Analizar y cambiar a diagrama de escalera tipo americano.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
En el esquema de maniobra, está representado tres fusibles F3, un relé térmico F2, dos
interruptores S1 y S2, un temporizador KA1, y dos contactores KM1 y KM2.
En el esquema de potencia se puede ver la representación de las resistencias estatóricas.
No se pueden representar en el esquema de maniobra, porque no son un elemento de
control, además, todo el circuito de maniobra es precisamente para controlar dichas
resistencias.
Explicación de la maniobra :
S1 :
Al pulsar sobre S1, entran en funcionamiento KM1 y KA1. Transcurrido un tiempo KA1,
temporiza y cambia KM1 por KM2, dejando desconectadas las resistencias estatóricas y
conectando el relé térmico de seguridad F2.
S2 :
Desconecta a KM2 y F2. Inicio del paro del motor, tiene una inercia.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
ARRANQUE EN KUSA.
En este tipo de arranque se coloca una sola resistencia en una de las fases, es indiferente
la fase que se elija. El valor de la resistencia debe de suministrarlo el propio fabricante del
motor.
Como todos los tipos de arranques que estamos viendo, tiene la finalidad de reducir la
intensidad de arranque. Se utiliza en motores de pequeña y mediana potencia que
necesitan un reducido par de arranque.
Diagrama de Potencia.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Diagrama de control.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
NOTA: Analizar y cambiar a diagrama de escalera tipo americano.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
En el esquema de maniobra, está representado tres fusibles F3, un relé térmico F2, dos
interruptores S1 y S2, un temporizador KA1, y dos contactores KM1 y KM2.
En el esquema de potencia se puede ver la representación de una resistencia. No se
representa dicha resistencia en el esquema de maniobra porque no es un elemento de
control, precisamente el esquema de maniobra es para poder controlar dicho elemento
eléctrico. Recordar, la resistencia la tiene que suministrar el propio fabricante del motor.
Explicación de la maniobra :
S1 :
Al pulsar sobre S1, entran en funcionamiento KM1 y KA1. Transcurrido un tiempo KA1,
temporiza y activa KM2, dejando desconectada la resistencia. En esta ocasión, el relé
térmico F2 o Rt, se encuentra conectado en todo momento por que solo hay una
resistencia en una sola fase, las otras dos fases no están protegidas.
S2 :
Desconecta todo el circuito. Inicio del paro del motor, tiene una inercia.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
ARRANQUE CON AUTOTRANSFORMADOR.
Este tipo de arranque mejora al arranque con resistencias estatóricas, al tener un mejor
par y no existir pérdidas por la disipación de calor en las resistencias. Sin embargo,
presenta un inconveniente, el precio, pues resulta más económico el arranque por
resistencias estatóricas. Se emplea el arranque por autotransformador en motores de
gran potencia, y como siempre, con la intención de reducir la intensidad absorbida en el
momento de arranque.
Diagrama de Potencia.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Diagrama de control.
NOTA: Analizar y cambiar a diagrama de escalera tipo americano.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
El esquema presentado aquí, trata sobre el arranque de un motor sobre dos puntos. La
utilidad de éste tipo de arranque es poder reducir la intensidad durante el arranque, se usa
en máquinas donde el par resistente sea bajo. Se emplea con motores trifásicos con el rotor
en cortocircuito.
Como el esquema indica, si accionamos sobre el pulsador S1 entrarán en juego KA1,KM1 y
KM2.
Con el temporizador KA1 regularemos el tiempo necesario para que cuando el motor se
encuentre en los valores nominales, se desconecten KM1 y KM2, conectándose a su vez
KM3, entonces el motor estará en régimen de trabajo habitual.
En cambio, si deseamos detener el motor, solo tenemos que accionar el pulsador S2.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
SENSORES
Los datos de entrada y de realimentación de los sistemas de control se introducen mediante
unos dispositivos, normalmente electrónicos, que se denominan sensores.
El sensor traduce la información que le llega del exterior en un impulso eléctrico,
normalmente digital (pasa o no pasa corriente), que puede ser analizado y procesado por
la unidad de control del sistema.
Tipos de Sensores
Existen diferentes tipos de sensores, en función del tipo de variable que tengan que medir
o detectar:
• De contacto.
• Ópticos.
• Térmicos.
• De humedad.
• Magnéticos.
• De infrarrojos.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
SENSORES DE CONTACTO
Se emplean para detectar el final del recorrido o la posición límite de componentes
mecánicos. Por ejemplo: saber cuando una puerta o una ventana que se abren
automáticamente están ya completamente abiertas y por lo tanto el motor que las
acciona debe pararse.
Los principales son los llamados fines de carrera (o finales de carrera). Se trata de un
interruptor que consta de una pequeña pieza móvil y de una pieza fija que se llama NA,
normalmente abierto, o NC, normalmente cerrado.
Final de carrera Símbolo de un final de carrera
La pieza NA está separada de la móvil y sólo hace contacto cuando el componente mecánico
llega al final de su recorrido y acciona la pieza móvil haciendo que pase la corriente por el
circuito de control.
La pieza NC hace contacto con la móvil y sólo se separa cuando el componente mecánico
llega al final de su recorrido y acciona la pieza móvil impidiendo el paso de la corriente por
el circuito de control. Según el tipo de fin de carrera, puede haber una pieza NA, una NC o
ambas.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
SENSORES ÓPTICOS
Detectan la presencia de una persona o de un
objeto que interrumpen el haz de luz que le llega
al sensor.
Los principales sensores ópticos son las
fotorresistencias, las LDR.
Recordemos que se trataba de resistencias cuyo
valor disminuía con la luz, de forma que cuando
reciben un haz de luz permiten el paso de la
corriente eléctrica por el circuito de control.
Cuando una persona o un obstáculo interrumpen
el paso de la luz, la LDR aumenta su resistencia e
interrumpe el paso de corriente por el circuito de
control.
Las LDR son muy útiles en robótica para regular el movimiento de los robots y detener su
movimiento cuando van a tropezar con un obstáculo o bien disparar alguna alarma.
También sirven para regular la iluminación artificial en función de la luz natural.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
El circuito que aparece en la imagen superior derecha nos permitiría controlar la puesta en
marcha de una alarma al disminuir la intensidad luminosa que incide sobre un LDR.
SENSORES DE TEMPERATURA
Los termistores son los principales sensores de temperatura.
Se trata de resistencias cuyo valor asciende con la temperatura (termistor PTC) o bien
disminuye con la temperatura (termistor NTC).
Por lo tanto, depende de la temperatura que el termistor permita o no el paso de la
corriente por el circuito de control del sistema.
El símbolo y la apariencia de un termistor es:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
La principal aplicación de los sensores térmicos es, como es lógico, la regulación de sistemas
de calefacción y aire acondicionado, además de las alarmas de protección contra incendios.
SENSORES DE HUMEDAD
Se basan en que el agua no es un material aislante como el aire sino que tiene una
conductividad eléctrica; por esa razón el Reglamento de Baja Tensión prohíbe la presencia
de tomas de corriente próximas a la bañera, como veíamos en el tema anterior.
Por lo tanto un par de cables eléctricos desnudos (sin cinta aislante recubriéndolos) van a
conducir una pequeña cantidad de corriente si el ambiente es húmedo; si colocamos un
transistor en zona activa que amplifique esta corriente tenemos un detector de humedad.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Imagen de un sensor de humedad de fabricación casera
Los sensores de humedad se aplican para detectar el nivel de líquido en un depósito, o en
sistemas de riego de jardines para detectar cuándo las plantas necesitan riego y cuándo no.
El esquema eléctrico muestra una sonda que detectaría la humedad y gracias a los
transistores se amplifica la señal para poner en marcha la bomba de riego.
SENSORES MAGNÉTICOS
Detecta los campos magnéticos que provocan los imanes o las corrientes eléctricas.
El principal es el llamado interruptor Reed; consiste en un par de láminas metálicas
de materiales ferromagnéticos metidas en el interior de una cápsula que se atraen en
presencia de un campo magnético, cerrando el circuito. Su símbolo recuerda
vagamente al del interruptor convencional:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
El interruptor Reed puede sustituir a los finales de carrera para detectar la posición de un
elemento móvil, con la ventaja de que no necesita ser empujado físicamente por dicho
elemento sino que puede detectar la proximidad sin contacto directo. Esto es muy útil
cuando interesa evitar el contacto físico, por ejemplo para detectar el nivel de agua de un
depósito sin riesgo de cortocircuitos.
SENSORES INFRARROJOS
Si recordamos el espectro electromagnético
estudiado en un tema anterior, existía una
franja de ondas electromagnéticas cuya
frecuencia es muy baja para que nuestros ojos
la detecten; son los infrarrojos.
Existen diodos capaces de emitir luz infrarroja y
transistores sensibles a este tipo de ondas y
que por lo tanto detectan las emisiones de los
diodos. Esta es la base del funcionamiento de
los mandos a distancia; el mando contiene
diodos que emiten infrarrojos que son recibidos por los fototransistores del aparato.
Los diodos de infrarrojos son
a simple vista idénticos a los
LED, como se puede apreciar
en la imagen, y se
representan de la misma
manera, mientras que el
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
símbolo de los fototransistores es semejante al
de los transistores normales pero añadiendo
las flechas que representan la luz que reciben.
Recordemos que las flechas salen del elemento
cuando éste emite luz o radiación infrarroja y
entran en él cuando el elemento recibe dicha
radiación.
CONCEPTOS BASICOS PLC
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Los Controladores Lógicos Programables (PLC) continúan evolucionando a medida que las
nuevas tecnologías se añaden a sus capacidades. El PLC se inició como un reemplazo para
los bancos de relevos. Poco a poco, las matemáticas y la manipulación de funciones lógicas
se añadieron. Hoy en día son los cerebros de la inmensa mayoría de la automatización,
procesos y máquinas especiales en la industria. Los PLCs incorporan ahora más pequeños
tamaños, más velocidad de las CPU y redes y tecnologías de comunicación diferentes. Se
puede pensar en un PLC como un pequeño computador industrial que ha sido altamente
especializado para prestar la máxima confianza y máximo rendimiento en un ambiente
industrial. En su esencia, un PLC mira sensores digitales y analógicos y switches (entradas),
lee su programa de control, hace cálculos matemáticos y como resultado controla
diferentes tipos de hardware (salidas) tales como válvulas, luces, relés, servomotores, etc.
en un marco de tiempo de milisegundos. Mientras los PLCs son muy buenos con el control
rápido de información, no comparten los datos y las señales con facilidad.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Comúnmente los PLCs intercambian información con paquetes de software en el nivel de
planta como interfaces maquina operador (HMI) o Control de Supervisión y Adquisición de
Datos (SCADA). Todo intercambio de datos con el nivel de negocios de la empresa (servicios
de información, programación, sistemas de contabilidad y análisis) tiene que ser recogido,
convertido y transmitido a través de un paquete SCADA. Típicamente en la mayoría de PLCs,
las redes de comunicación son exclusivas de la marca y con velocidad limitada.
Con la aceptación de Ethernet, las velocidades de comunicación de la red han aumentado,
pero todavía a veces usan se usan protocolos de propiedad de cada marca.
Nuevas tendencias En general, los PLC son cada vez más rápidos y más pequeños y como
resultado de esto, están ganando capacidades que solían ser dominio exclusivo de la
computadora personal (PC) y de las estaciones de trabajo. Esto se traduce en manejo datos
críticos de manera rápida que se comparte entre el PLC en el piso de la fábrica y el nivel de
negocios de la empresa. Ya no se trata de los PLCs antiguos que únicamente controlaban
salidas a partir de una lógica y de unas entradas. Algunas de las características que un PLC
puede aportar a sus proyectos de automatización son los servidores web, servidores FTP,
envío de e-mail y Bases de Datos Relacionales Internas.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
ESTRUCTURA DE UN PLC
Un PLC se puede definir como un sistema basado en un microprocesador. Sus partes
fundamentales son la Unidad Central de Proceso (CPU), la Memoria y el Sistema de Entradas
y Salidas (E/S). La CPU se encarga de todo el control interno y externo del PLC y de la
interpretación de las instrucciones del programa. En base a las instrucciones almacenadas
en la memoria y en los datos que lee de las entradas, genera las señales de las salidas. La
memoria se divide en dos, la memoria de solo lectura o ROM y la memoria de lectura y
escritura o RAM.
La memoria ROM almacena programas para el buen funcionamiento del sistema.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
La memoria RAM está conformada por la memoria de datos, en la que se almacena la
información de las entradas y salidas y de variables internas y por la memoria de usuario,
en la que se almacena el programa que maneja la lógica del PLC.
El sistema de Entradas y Salidas recopila la información del proceso (Entradas) y genera las
acciones de control del mismo (salidas). Los dispositivos conectadas a las entradas pueden
ser Pulsadores, interruptores, finales de carrera, termostatos, presostatos, detectores de
nivel, detectores de proximidad, contactos auxiliares, etc. Al igual, los dispositivos de salida
son también muy variados: Pilotos, relés, contactores, Drives o variadores de frecuencia,
válvulas, etc.
ENTRADAS Y SALIDAS (E/S) - INPUTS AND OUTPUTS (IO)
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Las entradas y salidas (E/S) de un PLC son digitales, analógicas o especiales. Las E/S digitales
se identifican por presentar dos estados diferentes: on u off, presencia o ausencia de
tensión, contacto abierto o cerrado, etc. Los niveles de tensión de las entradas más
comunes son 5 VDC, 24 VDC, 48 VDC y 220 VAC. Los dispositivos de salida más frecuentes
son los relés.
Las E/S análogas se encargan de convertir una magnitud analógica (tensión o corriente)
equivalente a una magnitud física (temperatura, flujo, presión, etc.) en una expresión
binaria. Esto se realiza mediante conversores analógico-digitales (ADC's). Por último, las E/S
especiales se utilizan en procesos en los que con las anteriores E/S vistas son poco efectivas,
bien porque es necesario un gran número de elementos adicionales, bien porque el
programa necesita de muchas instrucciones o por protocolos especiales de comunicación
que se necesitan para poder obtener el dato requerido por el PLC (HART, Salidas de trenes
de impulso, motores paso a paso).
FUNCIONAMIENTO DEL PLC
Cuando se pone en marcha el PLC lo primero que este realiza es una lista de chequeos
internos para dar permitir que todo desde el inicio este en buenas condiciones y todo esté
debidamente conectado (Power Supply, conexiones de entradas y salidas).
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Una vez efectuadas estas comprobaciones y son aprobadas, la CPU inicia la exploración del
programa y reinicializa.
Esto último si el autómata se encuentra en modo RUN (marcha), ya que de estar en modo
STOP (paro) aguardaría, sin explorar el programa, hasta la puesta en RUN. Al producirse el
paso al modo STOP o si se interrumpe la tensión de alimentación durante un tiempo lo
Suficientemente largo, la CPU detiene la exploración del programa y luego pone a cero, es
decir, desactiva todas las salidas. Mientras se está ejecutando el programa, la CPU realiza
en intervalos continuos de tiempo distintas funciones de diagnóstico (watch-dog). Cualquier
singularidad que se detecte se mostrará en los indicadores de diagnóstico del procesador y
dependiendo de su importancia se generará un código de error o se parará totalmente el
sistema. El tiempo total del ciclo de ejecución viene determinado por los tiempos
empleados en las distintas operaciones. El tiempo de exploración del programa es variable
en función de la cantidad y tipo de las instrucciones así como de la ejecución de subrutinas.
El tiempo de exploración es uno de los parámetros que caracteriza a un PLC y generalmente
se suele expresar en milisegundos por cada mil instrucciones. Para reducir los tiempos de
ejecución, algunas CPU's constan de dos o más procesadores que operan simultáneamente
y están dedicados a funciones específicas.
PROGRAMAR LA MEMORIA DE UN PLC
Al programar un PLC se necesita una interfaz entre
el operador y el PLC para introducir en la memoria
de usuario el programa con las instrucciones que
definen las secuencias de control. Normalmente
esta interfaz se lleva a cabo a través de software
instalados en Computadores personales (PC).
Dependiendo del tipo de PLC el equipo de
programación produce unos códigos de instrucción
directamente ejecutables por el procesador o bien
un código intermedio, que es interpretado por un
programa residente en el procesador (firmware).
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Las funciones que estos equipos o software de programación son la edición y modificación
del programa, detección de errores, archivamiento de programas (discos duros) y
monitoreo en línea de variables. La conexión del PC al PLC comúnmente se realiza mediante
una conexión en serie (generalmente la RS-232C o la RS-422). Hoy en día existen distintos
puertos disponibles según la marca del PLC.
PROGRAMACION LADDER PLC BASICA DESCRIPCIÓN
DEL LENGUAJE LADDER
Existen distintos tipos de lenguaje de programación de un PLC, quizás el más común sea la
programación tipo escalera o ladder. Los diagramas de escalera son esquemas de uso
común para representar la lógica de control de sistemas industriales. Se le llama diagrama
"escalera" porque se asemejan a una escalera, con dos rieles verticales (de alimentación) y
"escalones" (líneas horizontales), en las que hay circuitos de control que definen la lógica a
través de funciones. De esta manera Las principales características del lenguaje ladder son:
• Instrucciones de entrada se introducen a la izquierda Instrucciones de salida
se situarán en el derecho.
• Los carriles de alimentación son las líneas de suministro de energía L1 y L2 para los
circuitos de corriente alterna y 24 V y tierra para los circuitos de CC
• La mayoría de los PLC permiten más de una salida por cada renglón (Rung).
• El procesador (o "controlador") explora peldaños de la escalera de arriba a abajo y
de izquierda a derecha.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Las instrucciones de entrada son las condiciones que tiene el circuito para dejar o no dejar
pasar la corriente de una línea a la otra. Estas condiciones se manejan comúnmente con
contactos normalmente abierto o normalmente cerrados los cuales interpretan las señales
de alto y bajo de sensores o interruptores. Si las condiciones son verdaderas la corriente
llega a las instrucciones de salida las cuales generan acciones como energizar la bobina de
un motor o energizar una lámpara por ejemplo. De esta forma el paso de la corriente a las
bobinas de salida están condicionadas por la lógica que manejen las instrucciones de
entradas.
Un PLC tiene muchas terminales "de entrada" y también muchos terminales de salida, a
través de los cuales se producen las señales "alta" o "baja" que se transmiten a las luces de
energía, solenoides, contactores, pequeños motores y otros dispositivos que se prestan a
control on / off. En un esfuerzo por hacer PLC fácil de programar, el lenguaje de
programación ladder fue diseñado para asemejarse a los diagramas de lógica de escalera.
Por lo tanto, un electricista industrial o ingeniero eléctrico, acostumbrados a leer esquemas
de lógica ladder se sentirán más cómodos con la programación de un PLC si se maneja con
el lenguaje ladder.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
LÓGICA LADDER Y SU CABLEADO
De acuerdo con la definición de la "Nema" (NationalElectricalManufacturersAssociation) un
controlador programable es: "Un aparato electrónico operado digitalmente, que usa una
memoria programable para el almacenamiento interno de instrucciones para implementar
funciones específicas, tales como lógica, secuenciación, registro y control de tiempos,
conteo y operaciones aritméticas para controlar, a través de módulos de entrada/salida
digitales (ON/OFF) o analógicos (1 5 VDC, 4 20 mA, etc.), varios tipos de máquinas o
procesos.
CONFIGURACIONES DESTACADAS DEL PLC
Módulo De Entrada
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Módulo De Salida
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
SECUENCIA DE OPERACIONES EN UN PLC.
• i. Al encender el procesador, este efectúa un autochequeo de encendido e inhabilita las
salidas. Entra en modo de operación normal.
• ii. Lee el estado de las entradas y las almacena en una zona especial de memoria llamada
tabla de imagen de entradas.
• iii. En base a su programa de control, el PLC modifica una zona especial de memoria
llamada tabla de imagen de salida.
• iv. El procesador actualiza el estado de las salidas "copiando" hacia los módulos de salida
el estado de la tabla de imagen de salidas (estas controlan el estado de los módulos de
salida del PLC, relay, triacs, etc.).
• v. Vuelve paso b)
A cada ciclo de ejecución de esta lógica se le denomina ciclo de barrido (scan)
que generalmente se divide en:
• I/O scan
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
• ProgramScan
DESCRIPCION FISICA DE UN PLC
La imagen muestra la arquitectura interna de un PLC, ya teniendo el concepto de todo su
esquema externo, ahora profundizaremos las características del interior de un PLC:
Memoria Programable
En esta parte se encuentra las instrucciones para la secuencia de control lógico.
Memoria De Datos
En esta parte se ubican las condiciones de los cambios, interbloqueo, valores pasados de
datos y otros datos de trabajo.
Procesador Central
En esta parte se encuentra la lógica que será manipulada por los software de la Unidad de
Programación, aquí se encuentra lenguaje ensamblador del PLC.
Circuito De Entrada
En esta parte se encuentran los equipos de entradas como:
• Botoneras Selectores
• Interruptor de Límite
• Interruptor de Nivel
• Sensores Fotoeléctricos
• Sensores de Proximidad
• Contactores de Arrancador de Motor.
Circuito De Salida
En esta parte se encuentran los equipos de salidas como:
• Válvulas
• Arrancador de Motor
• Solenoides
• Alarmas
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
• Luces
• Ventiladores
• Bocinas
Puerta De Comunicaciones
Es la parte que enlaza con la PC, para poder editar, monitorear la secuencia lógica del PLC.
La siguiente imagen muestra el esquema al detalle de todo lo que conforma un PLC
internamente:
La siguiente imagen muestra el esquema al detalle del lado izquierdo que conforma un PLC
internamente:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
La siguiente imagen muestra el esquema al detalle del lado derecho que conforma un PLC
internamente:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
PROGRAMACION EN SIMULADOR LOGIXPRO.
Lógicas de Relé
Estas lecciones fueron diseñadas para familiarizarlo con la operación de Micro Logix serie
1000 y conducirlo paso a paso en el proceso de creación, edición y prueba de programas
sencillos de PLC utilizando las instrucciones lógicas de relé soportadas por Micro Logix.
Para familiarizarnos con las instrucciones básicas de la lógica de reléutilizada en los PLC
utilizaremos el simulador de Micrologix, con este simulador podemos programar las
funciones que en practicas futuras programaremos en el Micro Logix serie 1000
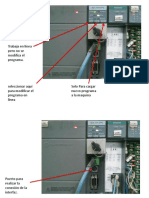
Para la comprensión de este ejercicio abriremos el simulador en la parte superior de la
pantalla, seleccione el I/O Simulation y asegúrese que la barra de instrucciones del usuario,
esté visible.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
ESTA:
Y en la parte inferior el primer renglon, como se muestra a continuacion.
La ventana de edición del programa debe mostrar un solo escalón, similar al de arriba. Este
es el escalón Final del Programa y es el último escalón en cualquier programa.
Si este es el único escalón visible entonces su programa está vacío.
Para crear uno nuevo y si su programa no está vacío, entonces haga click en la entrada File
del menú en la parte superior de la pantalla y seleccione "New" de la lista presente.
Una caja de diálogo aparecerá pidiéndole que tipo de procesador esta utilizando,para este
caso seleccione Micro Logix 1000
Ahora Maximice la ventana
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
El Simulador de Entrada/Salida (I/O Simulator)
La pantalla del simulador, similar a la mostrada arriba, debe estar a la vista. Para este
ejercicio usaremos la sección de simulación de Entrada/Salida, la cual consiste de 32 suiches
y luces. Se muestran dos grupos de 16 suiches conmutadores conectados a 2 tarjetas de
entrada de nuestro PLC simulado. Similarmente dos grupos de 16 luces se conectan a dos
tarjetas de salida de nuestro PLC. Las dos tarjetas de entrada tienen direcciones "I:1" e "I:3",
mientras las tarjetas de salida están direccionadas como "O:2" y "O:4".
Con el ratón ( mouse ) haga click en varios suiches y note que el estatus del terminal al cual
el suiche está conectado cambia de color. Mueva despacio el ratón sobre un suiche y
observe que el cursor del ratón cambia a una mano, lo que indica que el estado de un suiche
puede ser alterado al hacer click en esta localidad. Cuando se pasa el ratón aparece una
ventana tipo texto con una “ayuda” (“tip”) informándole
“RightClicktoToggleSwitchType" ( hagaclick con el botón derecho del ratón para cambiar el
tipo de suiche conmutador). Proceda a hacer click con el botón derecho del ratón sobre
un suiche, y note como el tipo de suiche cambia.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Creación de Programas con RSLogix
Reduzca el tamaño de la pantalla del simulador I/O a su tamaño normal al hacer clic de
nuevo en el botón del medio que usted usó anteriormente para engrandecer la pantalla de
simulación. Al hacer esto las dos ventanas de programación y la de simulación deben verse
de nuevo en la pantalla. Si usted lo desea puede ajustar el tamaño relativo de estas ventanas
moviendo con el ratón la barra que divide a ambas.
Ahora introduzca el siguiente programa de un solo escalón (rung), el cual consiste de una
sola instrucción de entrada XIC (XIC - Examine Entrada Cerrada) y una sola instrucción de
salida OTE (OTE – energizar la salida). Hay mas de una forma de hacer ésto, pero por ahora
se mostrará la forma que considero la mas comúnmente usada.
Primero haga click en el botón "New Rung" presente en la barra de instrucciones del usuario.
Este corresponde al primer botón en el lado izquierdo de la barra. Si usted mantiene el
apuntador del ratón fijo sobre cualquiera de estos botones por uno o dos segundos,
aparecerá una ayuda pequeña que describe la función o nombre de la instrucción que el
botón representa.
Ahora deberá ver un nuevo escalón agregado a su programa como se muestra arriba, y el
número del escalón al lado izquierdo deberá estar resaltado. Es de notar que el nuevo
escalón se agregó sobre el ya existente escalón Fin de Programa (END). De una manera
alternativa usted puede marcar el símbolo del escalón con el botón izquierdo del ratón y
arrastrarlo a uno cualquiera de los cuadrados pequeños que aparecen en el programa, lo
que generará un nuevo escalón en ese punto.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Ahora haga clic en la instrucción XIC con el botón izquierdo del ratón y ella será agregada a
la derecha de la selección resaltada. Nótese que la nueva instrucción XIC agregada ahora
está resaltada. De nuevo, alternativamente usted pudo arrastrar la instrucción desde la
barra de instrucciones al escalón deseado del programa.
Si usted accidentalmente agrega una instrucción y desea removerla, haga click con el
botón izquierdo del ratón en la instrucción a remover y luego presione la tecla "Del" ó
“Sup” en su teclado no numérico. Alternativamente, usted puede hacer click con el botón
derecho del ratón en la instrucción y luego seleccionar "Cut" del menú que se
despliega.
Haga clic con el botón izquierdo del ratón en la instrucción de salida OTE y esta será
agregada a la derecha de su actual selección.
Haga rápidamente dos veces click con el botón izquierdo del ratón en el signo de
interrogación “?” presente en la parte superior de la instrucción XIC . Una caja de texto que
comienza con “?” aparecerá en la cual usted deberá introducir la dirección (I:1/0) del
conmutador que deseamos monitorear. Use la tecla Backspace para eliminar la “?" presente
en el cuadro de texto. Una vez que introduzca la dirección, haga click en cualquier parte de
la instrucción, exceptuando el cuadro de texto, o presione la tecla enter y el cuadro se
cerrará.
Haga click con el botón derecho del ratón en la instrucción XIC y seleccione "Edit Symbol"
del menú que se muestra. Aparece otro cuadro de diálogo donde usted puede escribir un
nombre (por ejemplo Suiche 0) para asociarlo con esta dirección. Un clic fuera del cuadro lo
cerrará.
Introduzca la dirección y el símbolo para la instrucción OTE y su primer programa Logix
estará completo. Antes de continuar, verifique que las direcciones de las instrucciones sean
correctas.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
VERIFICACIÓN DEL PROGRAMA
Debemos bajar el programa al PLC ("Download"). Haga clic en el botón "Toggle" en la
esquina superior izquierda del panel de edición, como se muestra en la gráfica que sigue,
para traer el panel del PLC a la vista.
Haga click en el botón "DownLoad" para comenzar la bajada del programa al PLC. Una vez
completada, haga click dentro del círculo con la opción “RUN” para comenzar con la corrida
del programa por el PLC.
Engrandezca la ventana de Simulación ,de forma que pueda observar los suiches y las
lámparas, arrastrando hacia la derecha con el ratón la barra que separa las ventanas de
Simulación y del Programa. Ahora haga click en el Suiche I:1/00 en el simulador y si todo
está correcto, la lámpara debe iluminarse.
Conmute el suiche entre On (Encendido) y Off (Apagado) varias veces y observe el cambio
de valor indicado por los cuadros de status del PLC los cuales están constantemente
actualizado a medida que el PLC barre las instrucciones del programa. Trate de colocar el
PLC de regreso en el modo “PGM" y luego conmute el suiche del simulador varias veces y
note el resultado. Coloque el PLC de nuevo en el modo “RUN” y la barrida (scan) del
programa se reasume.
Nosotros pensamos que la instrucción XIC como un contacto eléctrico que permite el flujo
de corriente cuando se cierra un suiche externo. Esperamos que la salida OTE se energiza
si se permite que el flujo de corriente llegue a élla. En la práctica la instrucción XIC es una
instrucción condicional que verifica si el bit direccionado está en 1 (Verdadero). Si es
verdadero, la corriente fluye hacia OTE en nuestro caso.
Edición del Programa.
Haga click en el botón "Toggle" en el panel del PLC, lo que pondrá al PLC en el modo “PGM”
y permitirá ver el pánel de edición.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Ahora agregue un segundo escalón al programa como se muestra abajo. Ahora en vez de
introducir las direcciones como hicimos anteriormente, trate arrastrando la dirección
apropiada que se muestra en la simulación I/O , llevándola hacia la instrucción.
Note que la instrucción XIC que prueba la condición 0 ó Falso tiene su dirección resaltada
en amarillo. Esto indica que la instrucción está evaluada como Verdadera, que en el caso de
una XIC significa que el bit direccionado es actualmente cero ó Falso.
Este es un buen momento para practicar sus habilidades de arrastrar y dejar caer
(dragNdrop). Trate de mover instrucciones de escalón a escalón al hacer click con el botón
izquierdo del ratón sobre una instrucción y manteniendo el botón presionado arrastre la
instrucción a una nueva localidad. Trate de hacer lo mismo con eslabones completos al
arrastrar el cuadro al lado izquierdo del escalón y dejarlo caer en una nueva localidad.
Una vez que se sienta cómodo con el arrastre y dejar caer , asegúrese que el programa luzca
como el mostrado arriba. Ahora baje su programa al PLC y coloque al PLC en el modo
Run. Conmute ambos suiches 0 y 1 entre las posiciones On y Off varias veces y observe el
efecto que tiene sobre las lámparas.Asegurese que está conforme con el comportamiento
de su programa antes de proceder.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Parada/Arranque (Stop/Start) usando OTL y OTUP.
Para este ejercicio necesitamos dos suiches Normalmente Abiertos. Usando el botón
derecho del ratón haga click en los suiches "I1/2" y "I:1/3", lo que los cambia a pulsadores
normalmente abiertos (N.O. pushbuttons). Ahora agregue los dos siguientes escalones a su
programa. Una vez que introduzca los escalones correctamente, bájelo y corra su programa
modificado.
Active los suichesStart y Stop y asegure que las instrucciones de salida OTL y OTU responden
como se estipula en su texto. Una vez que tengas la lámpara encendida, ¿puede usted
apagarlo si la potencia se pierde en el circuito del suiche Stop?.
Ahora modifique su programa de forma que opere correctamente cuando usted sustituya
el suiche normalmente abierto (I:1/03) con un suiche normalmente cerrado.
Emulación del Control Standard Parada/Arranque (Stop/Start).
Borre su programa al seleccionar "New" desde el menu "File" en la parte superior de la
pantalla. Cuando el cuadro de diálogo aparece haga click en “OK” para seleccionar el tipo
PLC por descarte (default PLC type). Ahora introduzca el siguiente programa. Para introducir
una bifurcación, solo arrastre el botón de bifurcación en el escalón y luego inserte o arrastre
instrucciones en la ramificación.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Antes que baje y corra este programa, echemos un cuidadoso vistazo al uso de la instrucción
XIO para verificar el estado de un suiche normalmente cerrado de parada. Cuando alguien
presiona el suiche de parada (Stop Switch ), ¿ irá el bit I:1/04 a Verdadero o Falso? ¿Irá la
instrucción XIC al valor Verdadero o Falso cuando el suiche se presiona? ¿Es esta la lógica
deseada? .... Corra el programa y verifique si es correcta..... Si pierde potencia en el circuito
de parada ( StopSwitch ), ¿a que estado la lámpara irá? .... ¿Porqué piensa usted que la
mayoría prefiere este método en vez del método OTL/OTU para implementar el circuito de
Parada/Arranque?.
Ramificación de Salida con RSLogix
Modifique su programa para que sea igual a este:
Baje el programa al PLC y córralo. Opere los suiches Stop y Start varias veces con el Suiche0
abierto, y de Nuevo con el Suiche-0 cerrado. Remueva la instrucción XIC de la rama de salida
y observe a la lámpara 3 cuando usted arranca y para al circuito. Trate de mover la
instrucción OTE de la lámpara-3 de forma que esté en serie con la instrucción OTE de la
lámpara 2. Baje el programa al PLC y córralo. Observe como ambas lámparas encienden con
la rama vacía en su sitio. Ello puede aparecer como un circuito eléctrico pero sabemos que
en efecto no lo es y por lo tanto obedece un conjunto distinto de reglas. Remueva la
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
ramificación vacía. Baje el programa y córralo. Vea si esto tiene algú efecto en la lógica o en
la operación del escalón.
CONTROL DE UNA LUZ DESDE DOS LOCALIDADES.
Genere, introduzca y pruebe un programa que realice la función común de controlar una luz
desde dos localidades diferentes. Utilice los suiches conmutadores (I:1/00) y (I:1/01) para
controlar la lámpara (O:2/00)... (Ayuda: Si ambos suiches están Encendidos o si ambos
suiches están apagados, la lámpara debe estar encendida. Este es una forma de enfocar al
problema.)
Puerta de Garaje Utilizando Lógica de Relé.
Tome su tiempo para familiarizarse con los componentes presentes en el sistema Puerta de
Garaje y fíjese en particular en el estado actual de los suiches limitadores. Cuando la puerta
está en la posición cerrada, ambos suiches están en su estado activado (anormal). Coloque
el ratón sobre cada uno de los suiches y podrá ver que una caja de texto de ayuda aparece,
la cual indica que el suiche seleccionado se cableó usando contactos normalmente abiertos.
Ejercicio de Programación Para el Estudiante.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
En este ejercicio queremos que aplique sus conocimientos en instrucciones de lógica de relé
al diseño de un programa que controle la puerta. El sistema de la puerta consiste de un
motor reversible, un par de suiches limitadores y un panel de control, todo conectado a su
PLC. El programa monitoreará y controlará este equipo adheriéndose a las siguientes
premisas:
• El movimiento de la puerta se detendrá inmediatamente cuando se presione el
suiche Stop y permanecerá detenida cuando se deje de presionar el suiche.
• Al presionar el suiche Open, la puerta se abrirá siempre y cuando la puerta no esté
completamente abierta. Si el suiche es dejado de presionar la puerta continuará
abriéndose hasta abrirse por completo.
• Al presionar el suicheClose hará que la puerta se cierre a menos que esté
completamente cerrada. El cierre de la puerta se mantendrá hasta completarse aun
cuando deje de presionar el suiche de cierre.
• Si la puerta está completamente abierta, el presionar el suiche de Apertura de
Puerta no energizará el motor.
• Si la puerta está completamente cerrada, el presionar el suiche de Cierrre de Puerta
no debe energizar el motor.
• Bajo ninguna circunstancia los dos embobinados ( motor up y motor down ) del
motor deben energizarse simultáneamente.
• La luz Ajar deberá iluminarse si la puerta no está completamente cerrada o
completamente abierta.
• La luz Open se encenderá cuando la puerta esté completamente abierta.
• La luz Shut se encenderá cuando la puerta esté completamente cerrada.
Será de su responsabilidad el diseñar, documentar, depurar y probar su programa. Trate de
evitar el uso de instrucciones de anclaje OTL u OTU y trate de minimizar el número de
escalones que usa.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Asegúrese de usar apropiadamente comentarios en las instrucciones y escalones para
documentar su programa. Todos los componentes de Entrada/Salida (I/O) referenciados
dentro de su programa deben estar claramente etiquetados, y los comentarios en los
escalones deben clarificar los pasos que su programa ejecuta.
SEGUNDO EJERCICIO SUPLEMENTARIO DE PROGRAMACIÓN.
En este ejercicio queremos que modifique su programa para que se adhiera a los siguientes
criterios:
• Si la puerta se está abriendo y se presiona el suicheClose, se detendrá el movimiento
de la puerta, y la puerta permanecerá detenida cuando el suicheClose se deje de
presionar.
• Si la puerta se está cerrando y se presiona el suiche Open, la puerta detendrá su
movimiento. Cuando se suelte el suiche Open, la puerta comenzará a abrirse.
• Una vez que el movimiento de la puerta sea detenido por una de las dos causas
anteriormente mencionadas, el criterio de operación de la primera sección debe
seguirse de nuevo.
LA SIMULACIÓN DE UN SILO.
Del menú Simulations en la parte superior de la pantalla seleccione Silo Simulation. Una
imagen similar a la imagen de arriba se abrirá en la ventana de simulación. La imagen
siguiente muestra con detalle donde están los sensores de nivel (level sensor) y de
proximidad (prox sensor), suiches (START y STOP), luces ( RUN, FILL y FULL), válvula
solenoide (solenoidvalve) y motor del sistema con las correspondientes entradas y salidas
al PLC. Usted usará estos componentes en los ejercicios.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Operación Continua.
Diseñe y depure completamente un circuito de control usando lenguaje escalera que
automáticamente posicione y llene las cajas, las cuales aparecen secuencialmente en la
correa transportadora. Asegúrese que los siguientes detalles se satisfagan:
• La secuencia puede ser detenida y comenzada de Nuevo en cualquier momento
usando los suiches Stop y Start montados en el panel a la izquierda del simulador.
• La luz RUN permanecerá energizada siempre que el sistema esté operando en modo
automático.
• La luz RUN, el motor de la cinta transportadora y la válvula solenoide se
desenergizarán siempre que el sistema sea detenido con el suiche STOP.
• La luz FILL debe energizarse cuando la caja se esté llenando.
• La luz FULL se energizará cuando la caja esté llena y permanecerá así hasta que la
caja sea movida fuera del fotosensor.
LLENADO DE CAJAS CON COMIENZO DE NUEVO MANUAL.
Altere su programa o escriba uno nuevo de forma que incorpore los siguientes criterios:
• Detenga el movimiento de la cinta transportadora cuando el lado derecho de la caja
sea detectado por el fotosensor.
• Con la caja posicionada y la cinta transportadora detenida, abra la válvula solenoide
y permita que la caja sea llenada. El proceso de llenado debe concluir cuando el
sensor de nivel asuma el valor Verdadero.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
• La luz FILL debe energizarse mientras se está llenando la caja.
• La luz FULL debe energizarse cuando la caja esté llena y permanecerá energizada
mientras la caja llena no sea movida fuera del fotosensor.
• Una vez que la caja esté llena, deberá presionar momentáneamente el suicheStart
para mover la cinta transportadora y mover la caja llena fuera del área de llenado,
lo que al mismo tiempo traerá una nueva caja vacía a la posición de llenado. No se
acepta como solución a esta situación el que el suicheStart sea continuamente
presionado por el operador mientras la caja llena salga de la zona de llenado.
Ejercicio a Control de Tráfico usando 3 Luces.
Del menú de Simulations en la parte superior de la pantalla, seleccione la simulación titulada
como Traffic Light Simulation. En la ventana de simulación aparecerá una imagen como la
imagen superior al lado del título de la simulación. Debemos prestar atención a la sección
de la imagen correspondiente a la luz de tráfico, detallada en la siguiente imagen, donde
notamos cada luz y la salida del PLC que la controla.
Usando su conocimiento de temporizadores en cascada, desarrolle un programa en
lenguaje escalera que realice la secuencia de luces verde, amarilla ( ó ámbar) y roja de la
manera siguiente:
Secuencia de Operación:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
1. Luz Roja controlada por salida O:2/00 encendida por 12 segundos.
2. Luz Verde controlada por salida O:2/02 encendida por 8 segundos.
3. Luz Amarilla ( ó ámbar) controlada por salida O:2/01 encendida por 4 segundos.
4. La secuencia se repite otra vez comenzando con la luz roja.
<----------------- Tiempo en Segundos ------------------>
ROJA VERDE AMBAR
12 Sec. 8 Sec. 4 Sec.
Ejercicio b Control de Tráfico usando 6 Luces.
Modifique su programa de forma que las otras 3 luces representantes del flujo de tráfico en
la otra dirección también puedan ser controladas. Usted está tentado a usar seis
temporizadores para llevar a cabo esta tarea, pero el trabajo puede realizarse con solo
cuatro, y al mismo tiempo tendrá un programa mas claro.
Roja = O:2/00 Verde = O:2/02 Ambar = O:2/01
Verde = O:2/06 Ambar = O:2/05 Roja = O:2/04
8 Sec. 4 Sec. 8 Sec. 4 Sec.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
¿Como que se producen colisiones porque es muy rápido el cambio de amarillo ( ó ámbar)
en una dirección a verde en la otra dirección.? Parece que los conductores no le prestan
atención a la función de la luz amarilla ( ó ámbar), en vez de reducir su velocidad al
presentarse la luz amarilla, lo que hacen es acelerar, mientras que los conductores en la
otra dirección tan pronto ven la luz verde arrancan desesperados. No necesitamos realizar
un nuevo cableado para corregir esto. La solución a esta situación llevará un poco mas de
programación.
Ejercicio Control de Tráfico Usando Retraso Para la Luz Verde.
Modifique su programa de forma que exista un período de un segundo de retardo donde
las dos luces rojas estén encendidas antes de pasar a la secuencia verde, amarilla ( ó ámbar),
roja. El diagrama de tiempo mostrado abajo presenta solo uno de estos intervalos de un
segundo, pero se necesitan dos de ellos. Trabaje el problema y trate de no usar mas de seis
temporizadores.
!Si el intervalo de un segundo no es suficiente para controlar a estos conductores, proceda
a aumentar ese intervalo a dos segundos¡
EJERCICIO DE CONEXIÓN CON RSLINX
Tomar Notas de la explicación y repetir la operación al menos unas 3 ocasiones antes de
conectar el PLC
Configuración
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Para configurar las comunicaciones se debe abrir el RSLinks ya que es el programa que
gestiona las comunicaciones.
Communications - Configure Drivers ...
Dentro de Configure Drivers... seleccionar de la lista desplegable la opción RS-232 DF1
Una vez seleccionado el Driver pulsar Add New ..., aparecerá la siguiente ventana donde
se seleccionará el nombre. Al pulsar OK se entra en la ventana de configuración del nuevo
Driver.
Seleccionar el Comm Portcorrecto del PC, Device:SLC-CH0 Teniendo
el PLC conectado al PC pulsar Auto-Configure.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Tras varios mensajes, cuando la configuración sea completa, aparecerá el siguiente mensaje
Auto Configuration Successful!
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
este será el cuadro de dialogo que aparecerá cuando su PLC este conectado a su PC, no lo
sierre solo minimícelo para empezar a trabajar con el RsLogix 500.
CONFIGURACIÓN DEL CABLE DE CONEXIÓN PARA LOS PLC MICRO
LOGIX SERIE 1000 DE AB
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
PROGRAMACIÓN EN RS-LOGIX 500
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
En este punto se dan las directrices básicas
para la utilización del RSLogix 500. Este
programa permite crear los programas de
control en lenguaje Ladder del
autómata MicroLogix Serie 1000.
PANTALLA PRINCIPAL DEL
RSLOGIX 500
Descripción General del Software
RSLogix 500 es el software destinado a la creación de los programas del autómata en
lenguaje de esquema de contactos o también llamado lógica de escalera (Ladder). Incluye
editor de Ladder y verificador de proyectos (creación de una lista de errores) entre otras
opciones. Este producto se ha desarrollado para funcionar en los sistemas operativos
Windows.
Vista principal de RSLogix 500.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Barra de menú: permite realizar diferentes funciones como recuperar o guardar
programas, opciones de ayuda, etc. Es decir, las funciones elementales de cualquier
software actual.
Barra de iconos: engloba las funciones de uso más repetido en el desarrollo de los
programas.
Barra de estado del procesador: Nos permite visualizar y modificar el modo de trabajo
del procesador (online, offline, program, remote), cargar y/o descargar programas
(upload/downloadprogram), así como visualizar el controlador utilizado (Ethernet drive en
el caso actual).
Los modos de trabajo más usuales son:
• Offline: Consiste en realizar el programa sobre un ordenador, sin necesidad alguna de
acceder al PLC para posteriormente una vez acabado y verificado el programa
descargarlo en el procesador. Este hecho dota al programador de gran independencia a
la hora de realizar el trabajo.
• Online: La programación se realiza directamente sobre la memoria del PLC, de manera
que cualquier cambio que se realice sobre el programa afectará directamente al
procesador, y con ello a la planta que controla. Este método es de gran utilidad para el
programador experto y el personal de mantenimiento ya que permite realizar
modificaciones en tiempo real y sin necesidad de parar la producción.
Árbol del proyecto: Contiene todos las carpetas y archivos generados en el proyecto, estos
se organizan en carpetas. [1] Las más interesantes para el tipo de prácticas que se realizará
son:
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Controllerproperties: contiene las prestaciones del procesador que se está utilizando, las
opciones de seguridad que se quieren establecer para el proyecto y las comunicaciones.
Processor Status: se accede al archivo de estado del procesador
IO Configuration: Se podrán establecer y/o leer las tarjetas que conforman el sistema.
ChannelConfiguration: Permite configurar los canales de comunicación del procesador
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Contiene las distintas rutinas Ladder creadas para el proyecto.
Da acceso a los datos de programa que se van a utilizar así como a las referencias cruzadas
(crossreferences). Podemos configurar y consultar salidas (output), entradas (input),
variables binarias (binary), temporizadores (timer), contadores (counter), ...
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Si seleccionamos alguna de las opciones se despliegan diálogos similares al siguiente, en el
que se pueden configurar diferentes parámetros según el tipo de elemento.
Panel de resultados: aparecen los errores de programación que surgen al verificar la
corrección del programa realizado (situados en la barra de iconos). Efectuando doble clic
sobre el error, automáticamente el cursor se situará sobre la ventana de programa Ladder
en la posición donde se ha producido tal error.
También es posible validar el archivo mediante Edit>Verífy File o el proyecto completo
Edit>Verífy Project.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Barra de instrucciones: Esta barra le permitirá, a través de pestañas y botones, acceder de
forma rápida a las instrucciones más habituales del lenguaje Ladder. Presionando sobre
cada instrucción, ésta se introducirá en el programa Ladder.
Ventana del programa Ladder: Contiene todos los programas y subrutinas Ladder
relacionados con el proyecto que se esté realizando. Se puede interaccionar sobre esta
ventana escribiendo el programa directamente desde el teclado o ayudándose con el ratón
(ya sea arrastrando objetos procedentes de otras ventanas ó seleccionando opciones con el
botón derecho del ratón).
Configuración del autómata y las comunicaciones
Para empezar se ha de configurar el autómata que se usará, en nuestro caso se trata de un
MicroLogix 1500 LSP serie C. Para hacerlo nos dirigimos al menú File>New y en el diálogo
que aparece seleccionamos el procesador adecuado.
En el mismo diálogo se tiene la posibilidad de seleccionar la red a la que estará conectado.
Si hemos efectuado correctamente la configuración de la red anteriormente (con el RSLinx)
ya aparecerá el controlador correspondiente, en la esquina inferior izquierda de la figura
8.4 en el desplegable Driver. Sino, podemos usar el pulsador que aparece (Who Active) que
permite acceder a un diálogo similar a RSWho y seleccionar la red definida. Seleccionamos
el autómata MicroLogix 1500 que aparece.
Para que aparezca el autómata en la red se debe estar conectado a Internet y tener activado
el RSLinx.
Una vez aceptado (OK) aparecerá la ventana del proyecto y la ventana del programa Ladder.
Selección del Procesador
La configuración de la red se puede modificar en cualquier momento accediendo desde el
árbol de proyecto> Controller>ControllerCommunications.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Configuración de les comunicaciones del autómata
EDICIÓN DE UN PROGRAMA LADDER
Las diferentes instrucciones del lenguaje Ladder se encuentran en la barra de instrucciones
citada anteriormente (pantalla principal). Al presionar sobre alguno de los elementos de
esta barra estos se introducirán directamente en la rama sobre la que nos encontremos.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
A continuación se hará una explicación de las instrucciones usadas para la resolución de las
prácticas de este tema:
Añadir una nueva rama al programa
Crear una rama en paralelo a la que ya está creada
Contacto normalmente abierto (XIC - Examine IfClosed): examina si la variable binaria está
activa (valor=1), y si lo está permite al paso de la señal al siguiente elemento de la rama. La
variable binaria puede ser tanto una variable interna de memoria, una entrada binaria, una
salida binaria, la variable de un temporizador,...
En este ejemplo si la variable B3:0/0 es igual a 1 se activará la salida O:0/0.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Contacto normalmente cerrado (XIO - Examine If Open): examina si la variable binaria está
inactiva (valor=0), y si lo está permite al paso de la señal al siguiente elemento de la rama.
En este ejemplo si la variable B3:0/0 es igual a 0 se activará la salida O:0/0.
Activación de la variable (OTE - Output Energize): si las condiciones previas de la rama son
ciertas, se activa la variable. Si dejan de ser ciertas las condiciones o en una rama posterior
se vuelve a utilizar la instrucción y la condición es falsa, la variable se desactiva.
Para ciertos casos es más seguro utilizar las dos instrucciones siguientes, que son
instrucciones retentivas.
Activación de la variable de manera retentiva (OTL - Output Latch): si las condiciones
previas de la rama son ciertas, se activa la variable y continúa activada aunque las
condiciones dejen de ser ciertas.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Una vez establecida esta instrucción solo se desactivará la variable usando la instrucción
complementaria que aparece a continuación.
Desactivación de la variable (OTU - Output Unlatch): normalmente está instrucción se
utiliza para anular el efecto de la anterior. Si las condiciones previas de la rama son ciertas,
se desactiva la variable y continúa desactivada aunque las condiciones dejen de ser ciertas.
Flanco ascendente (ONS - OneShot): esta instrucción combinada con el contacto
normalmente abierto hace que se active la variable de salida únicamente cuando la variable
del contacto haga la transición de 0 a 1 (flanco ascendente). De esta manera se puede
simular el comportamiento de un pulsador.
Temporizador (TON - TimerOn-Delay): La instrucción sirve para retardar una salida,
empieza a contar intervalos de tiempo cuando las condiciones del renglón se hacen
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
verdaderas. Siempre que las condiciones del renglón permanezcan verdaderas, el
temporizador incrementa su acumulador hasta llegar al valor preseleccionado. El
acumulador se restablece (0) cuando las condiciones del renglón se hacen falsas.
Es decir, una vez el contacto (B3:0/0) se activa el temporizador empieza a contar el valor
seleccionado (Preset=5) en la base de tiempo especificada (1.0 s.). La base de tiempo puede
ser de 0.001 s., 0.01 s. y 1.00 s. Una vez el valor acumulado se iguala al preseleccionado se
activa el bit llamado T4:0/DN (temporizador efectuado). Este lo podemos utilizar como
condición en la rama siguiente.
Contador (CTU - Count Up): se usa para incrementar un contador en cada transición de
renglón de falso a verdadero.
Por ejemplo, esta instrucción cuenta todas las transiciones de 0 a 1 de las variable colocada
en el contacto normalmente abierto. Cuando ese número se iguale al preseleccionado (6 en
este caso) el bit C5:0/DN se activa. Este bit se puede usar posteriormente como condición
en otro renglón del programa.
Resetear (RES - Reset): La instrucción RES restablece temporizadores, contadores y
elementos de control.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
En el ejemplo presentado a continuación una vez aplicado el reset, el contador se pone a
cero y cuando la condición del renglón del contador vuelca a ser cierta, empezará a contar
de cero.
Para introducir el nombre de las variables se puede hacer mediante el teclado o a partir del
Árbol del proyecto>Data Files y seleccionar el elemento necesario (salida, entrada,
variable..). Una vez seleccionado el elemento se abre una ventana y se puede arrastrar con
el ratón la variable como se muestra en la figura 8.5, y colocar el nombre de la variable
(0:0.0/0) encima de la casilla verde de la instrucción (indicada con el círculo azul).
Adición de Variables
Para más información sobre las instrucciones usadas en el RSLogix 500 se puede acceder al
menú de ayuda: Help>SLC InstructionHelp y se encuentra un explicación muy detallada de
su funcionamiento.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Ayuda de las instrucciones
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
DESCARGA DEL PROGRAMA
Una vez se ha realizado el programa y se ha verificado que no exista ningún error se procede
a descargar el programa al procesador del autómata (download)
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Descarga del programa autómata
A continuación aparecen diversas ventanas de diálogo que se deben ir aceptando
sucesivamente:
Salvar el programa
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Aceptación de la descarga
Paso a modo - RemoteProgram
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Transfiriendo datos del programa
Paso a modo Run (el programa está en funcionamiento)
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Paso a modo online (conectado)
Programa online y forzado de entrada
Para desconectar el enlace entre el ordenador personal y el autómata se deben seguir los
siguientes pasos, siempre teniendo en cuenta que una vez desconectado el autómata este
sigue funcionando con el programa descargado. Es importante dejar el programa en un
estado segura (pulsador de paro).
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Paso a modo offline (desconectado)
A continuación aparece un diálogo para salvar el programa realizado, de esta manera se
puede salvar todos los archivos de datos (tablas de variables, salidas, temporizadores,...).
Salvar los resultados
Pueden surgir algunos problemas durante la descarga del programa, el más comúes que
existan problemas con la conexión a Internet. Entonces al descargar el programa surgirá un
diálogo en el que se muestra que el camino de la conexión no está funcionando. Para
solucionar el problema se debe comprobar si la configuración del drive en el RSLinx es
correcta y si la conexión a Internet del usuario está funcionando de manera normal.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Conexión sin funcionar
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
BUENA Y MALA CONEXIÓN A ETHERNET Menú Ayuda
Para cualquier duda que se pueda presentar en el uso del programa, se puede utilizar la
ayuda que es bastante completa. Esta permite buscar según palabras clave o por
agrupaciones de contenido.
Ayuda del RS Logix 500
REQUISITOS MÍNIMOS DEL SISTEMA
Para poder utilizar este software sin problemas se requiere tener un sistema con las
siguientes características como mínimo:
• Intel Pentium III o superior
• 512 MB de RAM para Windows NT, Windows 2000, o Windows XP
• 10 GB de espacio de disco duro disponible
• Monitor y adaptador gráfico SVGA 256-color con resolución 800x600
• CD-ROM drive
• RSLinx"¢ (software de comunicación) versión 2.31.00 o posterior.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Trabajo realizado por
Ing. Jerónimo Sosa Vega.
Instructor Área Electromecánica del
Centro de Entrenamiento en Alta Tecnología.
Maestro de Tiempo completo de Ingeniería en Mecatrónica de la Universidad
Tecnológica de Cd Juárez.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
Primera impresión para clases en CENALTEC Lunes
4 de febrero del 2013
Barranco Azul #5961
Parque Industrial Aeropuerto
Cd. Juárez, Chih., C.P. 32695
Tel. +52(656) 633-2165
Fax +52(656) 633-0573
www.cenaltec.edu.mx
BIBLIOGRAFÍA
http://www.automatas.org/allen/PLC5.htm http://www.alegsa.com.ar
http://www.geocities.com/ingenieria_control/control2.htm
http://www.sc.ehu.es/sbweb/webcentro/automatica/WebCQMH1/PAGINA%20PRINCIPAL
/PLC/FUNCIONAMIENTO/funcionamiento.htm#Modo%20de%20funcionamiento
http://wapedia.mobi/es/Controlador_l%C3%B3gico_programable#1.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
http://www.unicrom.com/Tut_ProgramarPLC.asp
http://www.unicrom.com/art_historia_PLC.asp
http://www.unicrom.com/Art_OrigenHistoriaAutomatas.asp
http://www.profesores.frc.utn.edu.ar/industrial/sistemasinteligentes/UT3/plc/PLC.html
http://www.megaupload.com/?d=P7UAQAG6 http://www.dimeint.com.mx
http://www.mailxmail.com/curso-controladores-logicos-programables/estructura-basicaplc
http://www.control-systems-principles.co.uk/whitepapers/spanishwp/14ProgLogicSP.pdf
http://www.industria.uda.cl/Academicos/AlexanderBorger/Docts Manual de plc
Cenaltec.
Barranco azul N. 5961 Parque Industrial Aeropuerto C.P. 32695
Ciudad Juarez, Chih. Mexico Tel. +52(656) 633-2165/68 Fax +52 (656) 633-2165
www.cenaltec.edu.mx
S-ar putea să vă placă și
- Diagnosis de averías y mantenimiento correctivo de sistemas de automatización industrial. ELEM0311De la EverandDiagnosis de averías y mantenimiento correctivo de sistemas de automatización industrial. ELEM0311Evaluare: 5 din 5 stele5/5 (1)
- Montaje y reparación de sistemas eléctricos y electrónicos de bienes de equipo y máquinas industriales. FMEE0208De la EverandMontaje y reparación de sistemas eléctricos y electrónicos de bienes de equipo y máquinas industriales. FMEE0208Încă nu există evaluări
- Automatización electroneumática Métodos sistemáticos: Álgebra de Boole, cascada, paso a pasoDe la EverandAutomatización electroneumática Métodos sistemáticos: Álgebra de Boole, cascada, paso a pasoÎncă nu există evaluări
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De la EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Evaluare: 4.5 din 5 stele4.5/5 (2)
- Puesta en marcha y regulación de instalaciones frigoríficas. IMAR0108De la EverandPuesta en marcha y regulación de instalaciones frigoríficas. IMAR0108Încă nu există evaluări
- UF2243 - Diagnosis de averías en electrodomésticos de gama industrialDe la EverandUF2243 - Diagnosis de averías en electrodomésticos de gama industrialEvaluare: 5 din 5 stele5/5 (1)
- Sistemas automáticos industriales de eventos discretosDe la EverandSistemas automáticos industriales de eventos discretosÎncă nu există evaluări
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De la EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Evaluare: 3 din 5 stele3/5 (1)
- Automatización electroneumáticaDe la EverandAutomatización electroneumáticaEvaluare: 3.5 din 5 stele3.5/5 (3)
- Reparación de instalaciones automatizadas. ELEE0109De la EverandReparación de instalaciones automatizadas. ELEE0109Încă nu există evaluări
- Metodología básica de instrumentación industrial y electrónicaDe la EverandMetodología básica de instrumentación industrial y electrónicaEvaluare: 4 din 5 stele4/5 (12)
- UF0902 - Caracterización de instalaciones de climatizaciónDe la EverandUF0902 - Caracterización de instalaciones de climatizaciónEvaluare: 5 din 5 stele5/5 (1)
- Ejemplo de Una Subestacion ElectricaDocument114 paginiEjemplo de Una Subestacion ElectricaScada UcvÎncă nu există evaluări
- Montaje en instalaciones domóticas en edificios. ELES0208De la EverandMontaje en instalaciones domóticas en edificios. ELES0208Evaluare: 5 din 5 stele5/5 (1)
- Montaje de los cuadros de control y dispositivos eléctricos y electrónicos de los sistemas domóticos e inmóticos. ELEM0111De la EverandMontaje de los cuadros de control y dispositivos eléctricos y electrónicos de los sistemas domóticos e inmóticos. ELEM0111Evaluare: 5 din 5 stele5/5 (1)
- Montaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208De la EverandMontaje y puesta en marcha de sistemas robóticos y sistemas de visión, en bienes de equipo y maquinaria industrial. FMEE0208Evaluare: 3 din 5 stele3/5 (1)
- Conexión de Motores ElectricosDocument4 paginiConexión de Motores ElectricosLuis Eduardo Mercado100% (2)
- Mantenimiento preventivo de instalaciones frigoríficas. IMAR0108De la EverandMantenimiento preventivo de instalaciones frigoríficas. IMAR0108Încă nu există evaluări
- UF2244 - Mantenimiento correctivo de electrodomésticos de gama industrialDe la EverandUF2244 - Mantenimiento correctivo de electrodomésticos de gama industrialEvaluare: 1 din 5 stele1/5 (1)
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De la EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Evaluare: 2 din 5 stele2/5 (1)
- MF1161_3 - Electrotécnia para instalaciones térmicasDe la EverandMF1161_3 - Electrotécnia para instalaciones térmicasÎncă nu există evaluări
- UF1965 - Operaciones auxiliares en el mantenimiento de equipos eléctricosDe la EverandUF1965 - Operaciones auxiliares en el mantenimiento de equipos eléctricosÎncă nu există evaluări
- Curso Control ElectricoDocument1 paginăCurso Control Electricogabbie?0% (1)
- Instalaciones de puesta a tierra y protección de sistemas eléctricosDe la EverandInstalaciones de puesta a tierra y protección de sistemas eléctricosEvaluare: 5 din 5 stele5/5 (1)
- Código técnico de edificación. Guía práctica para el instaladorDe la EverandCódigo técnico de edificación. Guía práctica para el instaladorÎncă nu există evaluări
- Mantenimiento preventivo de instalaciones de climatización y ventilación-extracción. IMAR0208De la EverandMantenimiento preventivo de instalaciones de climatización y ventilación-extracción. IMAR0208Evaluare: 5 din 5 stele5/5 (1)
- Libro Fundamentos Del Control Eléctrico IndustrialDocument549 paginiLibro Fundamentos Del Control Eléctrico IndustrialLuisa Fer Benitez87% (23)
- Programación de controladores avanzados SIMATIC S7 1500 con TIA Portal, AWL/KOP y SCLDe la EverandProgramación de controladores avanzados SIMATIC S7 1500 con TIA Portal, AWL/KOP y SCLEvaluare: 3.5 din 5 stele3.5/5 (10)
- Manual de Prácticas PLCDocument32 paginiManual de Prácticas PLCJonnhy TrejoÎncă nu există evaluări
- UF1441 - Planificación del montaje de las instalaciones eléctricas en el entorno de edificios y con fines especialesDe la EverandUF1441 - Planificación del montaje de las instalaciones eléctricas en el entorno de edificios y con fines especialesEvaluare: 5 din 5 stele5/5 (1)
- UF2240 - Mantenimiento correctivo de electrodomésticos de gama blancaDe la EverandUF2240 - Mantenimiento correctivo de electrodomésticos de gama blancaEvaluare: 3 din 5 stele3/5 (3)
- Mecatrónica: modelado, simulación y control de sistemas físicosDe la EverandMecatrónica: modelado, simulación y control de sistemas físicosÎncă nu există evaluări
- Lo Secreto Del Mantenimiento IndustrialDe la EverandLo Secreto Del Mantenimiento IndustrialEvaluare: 4 din 5 stele4/5 (2)
- Puesta en marcha y regulación de instalaciones de climatización y ventilación-extracción. IMAR0208De la EverandPuesta en marcha y regulación de instalaciones de climatización y ventilación-extracción. IMAR0208Încă nu există evaluări
- Guia para El Control de Motores - Roni DominguezDocument23 paginiGuia para El Control de Motores - Roni DominguezFranco Schiavi0% (1)
- Elementos Eléctricos de Control IndustrialDocument46 paginiElementos Eléctricos de Control IndustrialEstefania Chab Diaz25% (4)
- Como Conectarse en El PLC Allen BradleyDocument27 paginiComo Conectarse en El PLC Allen BradleyluisÎncă nu există evaluări
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De la EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Evaluare: 2 din 5 stele2/5 (1)
- UF0904 - Selección de equipos y elementos en instalaciones de climatizaciónDe la EverandUF0904 - Selección de equipos y elementos en instalaciones de climatizaciónÎncă nu există evaluări
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208De la EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208Încă nu există evaluări
- Muestra Control de Motores Electricos EbookDocument23 paginiMuestra Control de Motores Electricos EbookEdison Ospina Celis78% (9)
- Diagrama de Fuerza y ControlDocument12 paginiDiagrama de Fuerza y ControlAlejandro Ibarra67% (3)
- Programacion de PLC BasicoDocument27 paginiProgramacion de PLC BasicoCARLOS100% (11)
- Componentes de Control EléctricoDocument32 paginiComponentes de Control EléctricoJuan De la cruz67% (3)
- Control de Motores EléctricosDocument18 paginiControl de Motores Eléctricosmanuel.m100% (3)
- PLC EjerciciosDocument13 paginiPLC EjerciciosCristian uriel0% (2)
- Control de Motores Eléctricos PDFDocument18 paginiControl de Motores Eléctricos PDFpleonh89Încă nu există evaluări
- Electricidad IndustrialDocument2 paginiElectricidad IndustrialLuis H. Segura50% (2)
- Controladores L Óg Icos Programables (PLC)Document49 paginiControladores L Óg Icos Programables (PLC)Jimmy100% (1)
- Curso PLCDocument172 paginiCurso PLCJuan Olmedo100% (3)
- Relevadores y ContactoresDocument11 paginiRelevadores y ContactoresArmando Lopez HernandezÎncă nu există evaluări
- ActuadoresDocument55 paginiActuadoresLucia Nataly Roman MacasÎncă nu există evaluări
- Control de Motores Eléctricos - Fundamentos de Controles EléctricosDocument146 paginiControl de Motores Eléctricos - Fundamentos de Controles EléctricosMMÎncă nu există evaluări
- Omron MX2 PresentacionDocument49 paginiOmron MX2 Presentacionb451677100% (2)
- 1 Control Electrico de MotoresDocument28 pagini1 Control Electrico de MotoresMiguel Garcia GuevaraÎncă nu există evaluări
- Curso PLCDocument48 paginiCurso PLCVictor Manuel Prieto Hernandez100% (6)
- Intervalos de Confianza para La ProporciónDocument1 paginăIntervalos de Confianza para La ProporciónMalena RodriguezÎncă nu există evaluări
- Distribucion Muestral de La Proporcion 5Document1 paginăDistribucion Muestral de La Proporcion 5Malena RodriguezÎncă nu există evaluări
- Distribucion Muestral de La Proporcion 2Document1 paginăDistribucion Muestral de La Proporcion 2Malena RodriguezÎncă nu există evaluări
- Intervalos de Confianza para La MediaDocument1 paginăIntervalos de Confianza para La MediaMalena RodriguezÎncă nu există evaluări
- Distribución Muestral para La Diferencia de ProporcionesDocument2 paginiDistribución Muestral para La Diferencia de ProporcionesMalena RodriguezÎncă nu există evaluări
- Sensores y Transductores de Posicion y VelocidadDocument11 paginiSensores y Transductores de Posicion y VelocidadMalena RodriguezÎncă nu există evaluări
- Tabla Z Distribución Completa-1Document1 paginăTabla Z Distribución Completa-1Malena RodriguezÎncă nu există evaluări
- CONTROL INDUSTRIAL Y PLCsDocument50 paginiCONTROL INDUSTRIAL Y PLCsMalena RodriguezÎncă nu există evaluări
- Manual de Descarga e Instalación de SolidWorks 2016Document28 paginiManual de Descarga e Instalación de SolidWorks 2016Malena RodriguezÎncă nu există evaluări
- Manual de Instrucciones SLC 500 y MicroDocument726 paginiManual de Instrucciones SLC 500 y MicroMalena RodriguezÎncă nu există evaluări
- Valvulas HidraulicasDocument17 paginiValvulas HidraulicasMalena Rodriguez100% (1)
- Sensores y Transductores U2Document34 paginiSensores y Transductores U2Malena RodriguezÎncă nu există evaluări
- U1 - Ejercicio Asincrónico (Módulo 2)Document59 paginiU1 - Ejercicio Asincrónico (Módulo 2)Malena RodriguezÎncă nu există evaluări
- Habilidades para El Futuro Power PointDocument53 paginiHabilidades para El Futuro Power PointMalena RodriguezÎncă nu există evaluări
- Unidad de PotenciaDocument5 paginiUnidad de PotenciaMalena RodriguezÎncă nu există evaluări
- Fundamentos Sistemas HidraulicosDocument10 paginiFundamentos Sistemas HidraulicosMalena RodriguezÎncă nu există evaluări
- ActuadoresDocument6 paginiActuadoresMalena RodriguezÎncă nu există evaluări
- Unidad 2 - Presentación para Las Clases (Módulos 3)Document58 paginiUnidad 2 - Presentación para Las Clases (Módulos 3)Malena RodriguezÎncă nu există evaluări
- Practica #2 Angulo de Fase, Potencia Real y AparenteDocument12 paginiPractica #2 Angulo de Fase, Potencia Real y AparenteMalena RodriguezÎncă nu există evaluări
- Circuitos I Potencia y Maxima Transferencia de PotenciaDocument8 paginiCircuitos I Potencia y Maxima Transferencia de PotenciaPedro RiveroÎncă nu există evaluări
- Traduccion Documento FarahDocument5 paginiTraduccion Documento FarahAna RodriguezÎncă nu există evaluări
- Ensayo Buenas PracticasDocument3 paginiEnsayo Buenas PracticasHector Caballero BautistaÎncă nu există evaluări
- Certificado de Garantía - jmc-893Document1 paginăCertificado de Garantía - jmc-893cesar franz napaico perezÎncă nu există evaluări
- Manual para La Implementacion Del Sistema de Gestion en Seguridad y Salud en El TrabajoDocument1 paginăManual para La Implementacion Del Sistema de Gestion en Seguridad y Salud en El TrabajoRandall Echevarría MuñozÎncă nu există evaluări
- FIGURA 14.17 (A) Rebote de Un Interruptor Mecánico Utilizado para La Detección de Estado, y (B) Un Circuito AntirreboteDocument189 paginiFIGURA 14.17 (A) Rebote de Un Interruptor Mecánico Utilizado para La Detección de Estado, y (B) Un Circuito AntirreboteRoberto ParedesÎncă nu există evaluări
- 1Document2 pagini1Soy JassonÎncă nu există evaluări
- Atmos International API 1175 ResumenDocument20 paginiAtmos International API 1175 ResumenJosé María Rodríguez RiveraÎncă nu există evaluări
- Ciudad InformacionalDocument19 paginiCiudad InformacionalLía DepazÎncă nu există evaluări
- Constancia Laboral LibniArmandoPerezDeLeon 23 09 2022Document1 paginăConstancia Laboral LibniArmandoPerezDeLeon 23 09 2022Pérez ArmandoÎncă nu există evaluări
- Fifa 22Document2 paginiFifa 22DAVID MANRIQUE0% (1)
- Introduccion 1Document31 paginiIntroduccion 1andresfc71424Încă nu există evaluări
- Excel + VBA - Ejemplo de FacturaciónDocument94 paginiExcel + VBA - Ejemplo de FacturaciónDavid Ocampo Gonzalez100% (5)
- CuestionariosDocument3 paginiCuestionariosdenisrjc50% (4)
- Práctica 10. Control y Administración de Los Recursos Del SistemaDocument8 paginiPráctica 10. Control y Administración de Los Recursos Del SistemaianaltriÎncă nu există evaluări
- Museo VirtualDocument2 paginiMuseo VirtualMilagros ConchaÎncă nu există evaluări
- 06 Estudio Topografico PiscinaDocument6 pagini06 Estudio Topografico PiscinaRichard Cruz MaxiÎncă nu există evaluări
- ES VEGABAR 83 4 20 MaDocument2 paginiES VEGABAR 83 4 20 MaFernanda Yañez RiosÎncă nu există evaluări
- Test de Desempeño para JefesDocument2 paginiTest de Desempeño para JefesAngeil Ramirez DelgadoÎncă nu există evaluări
- Presentación Fundamentos de ProgramaciónDocument1 paginăPresentación Fundamentos de ProgramaciónJsonÎncă nu există evaluări
- PUD UN2 Paquetes ContablesDocument2 paginiPUD UN2 Paquetes ContablesSantiago TorresÎncă nu există evaluări
- Academia Raio UdeDocument10 paginiAcademia Raio UdeSantiago TrujilloÎncă nu există evaluări
- Primer Informe PDFDocument20 paginiPrimer Informe PDFkarenÎncă nu există evaluări
- Caso Netflix Principios Gerenciales - Actividad 4y5Document4 paginiCaso Netflix Principios Gerenciales - Actividad 4y5JESUS ANTONIO VILLAMIZAR LOAIZAÎncă nu există evaluări
- Enfoque Sistemico de Los ProyectosDocument2 paginiEnfoque Sistemico de Los ProyectosMoises MercadoÎncă nu există evaluări
- Guía de Trabajo Autónomo 8 para NovenoDocument8 paginiGuía de Trabajo Autónomo 8 para Novenoyair garcia FonsecaÎncă nu există evaluări
- Tecnicas de Resolucion de Problemas DDHDPLDocument12 paginiTecnicas de Resolucion de Problemas DDHDPLLiah1209100% (1)
- Inspecciones SST 2019 Technical - ResumenDocument3 paginiInspecciones SST 2019 Technical - ResumenCdi CoishcoÎncă nu există evaluări
- Actividades DescritasDocument10 paginiActividades DescritasCarlos MarioÎncă nu există evaluări
- Ejercicio 3 JuegosDocument3 paginiEjercicio 3 JuegosLuis Vergara SotoÎncă nu există evaluări