S-ar putea să vă placă și
- Power Systems Modelling and Fault Analysis: Theory and PracticeDe la EverandPower Systems Modelling and Fault Analysis: Theory and PracticeEvaluare: 2 din 5 stele2/5 (1)
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsDe la EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsÎncă nu există evaluări
- Installation of capacitor bank and STATCOM for load reliefDocument9 paginiInstallation of capacitor bank and STATCOM for load reliefPrarthana AithalÎncă nu există evaluări
- Capacitor, Bank, Statcom, PPDocument6 paginiCapacitor, Bank, Statcom, PPsirageldeenÎncă nu există evaluări
- I EECONDocument7 paginiI EECONUjjawal kumarÎncă nu există evaluări
- Voltage Source Converter Based HVDC: September 2012Document11 paginiVoltage Source Converter Based HVDC: September 2012Muh GunawanÎncă nu există evaluări
- Design and Simulation of DC-DC Converters: January 2016Document9 paginiDesign and Simulation of DC-DC Converters: January 2016Thet TinÎncă nu există evaluări
- STATCOM A Review On Different Configurations and TopologiesDocument6 paginiSTATCOM A Review On Different Configurations and TopologiesEditor IJTSRDÎncă nu există evaluări
- Cat Swarm Optimization To Shunt Capacitor Allocation in Algerian Radial Distribution Power SystemDocument10 paginiCat Swarm Optimization To Shunt Capacitor Allocation in Algerian Radial Distribution Power SystemIAES IJAIÎncă nu există evaluări
- Improvement of Power Quality by Using Advanced Reactive Power CompensationDocument8 paginiImprovement of Power Quality by Using Advanced Reactive Power CompensationResearch ParkÎncă nu există evaluări
- ReviewDocument10 paginiReviewĐăng VinhÎncă nu există evaluări
- Modelling and Simulation of Facts Devices TCSC and SVC For A 11 Bus Power SystemDocument9 paginiModelling and Simulation of Facts Devices TCSC and SVC For A 11 Bus Power SystemEditor IJTSRDÎncă nu există evaluări
- IOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringDocument6 paginiIOSRJEN (WWW - Iosrjen.org) IOSR Journal of EngineeringIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalÎncă nu există evaluări
- Optimal Siting of Capacitors in Radial Distribution Network Using Whale Optimization AlgorithmDocument11 paginiOptimal Siting of Capacitors in Radial Distribution Network Using Whale Optimization Algorithmsri261eeeÎncă nu există evaluări
- Back-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesDocument8 paginiBack-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesBinh NgoÎncă nu există evaluări
- DC DCconverters 2016Document9 paginiDC DCconverters 2016aaqibÎncă nu există evaluări
- DC DCconverters 2016Document9 paginiDC DCconverters 2016Rizka GhaisaniÎncă nu există evaluări
- Double Tail Dynamic CompDocument10 paginiDouble Tail Dynamic CompBhura AnushaÎncă nu există evaluări
- Application of SRF-PI Current Control in The Design of A Single-Phase Asymmetrical Inverter For Use in Weak Grid EnvironmentsDocument17 paginiApplication of SRF-PI Current Control in The Design of A Single-Phase Asymmetrical Inverter For Use in Weak Grid EnvironmentsResearch ParkÎncă nu există evaluări
- DC_DCconverters_2016Document9 paginiDC_DCconverters_2016TamilselvanÎncă nu există evaluări
- Control and Operation of A DC Grid Based Wind Power Generation System in Micro GridDocument4 paginiControl and Operation of A DC Grid Based Wind Power Generation System in Micro GridEditor IJTSRDÎncă nu există evaluări
- Regular Paper Modeling and Simulation of TCSC-Operated Single-Phase Induction MotorDocument15 paginiRegular Paper Modeling and Simulation of TCSC-Operated Single-Phase Induction Motorni60Încă nu există evaluări
- Impulse Voltage Generator Modelling Using MATLAB PDFDocument8 paginiImpulse Voltage Generator Modelling Using MATLAB PDFAsmaÎncă nu există evaluări
- Block Diagram Base Paper PDFDocument10 paginiBlock Diagram Base Paper PDFsony tejaswiÎncă nu există evaluări
- Tarun MittalDocument11 paginiTarun MittalER Publications, IndiaÎncă nu există evaluări
- Design_and_Implementation_of_Switched_Capacitor_BaDocument15 paginiDesign_and_Implementation_of_Switched_Capacitor_BaDEEPAK PRAJAPATIÎncă nu există evaluări
- ThesisDocument76 paginiThesisSayantan Sinha100% (1)
- 07 Asep10090Document12 pagini07 Asep10090Jonathan ManzakiÎncă nu există evaluări
- Reactive Power CompensationDocument10 paginiReactive Power CompensationmichyimÎncă nu există evaluări
- ICIEETFinal PaperDocument7 paginiICIEETFinal PaperAnnisa Nur AuliyaÎncă nu există evaluări
- Af3526312639 PDFDocument9 paginiAf3526312639 PDFGonzalo GomezÎncă nu există evaluări
- Power Flow Control in Power System Using PDFDocument6 paginiPower Flow Control in Power System Using PDFMuhammad ApriÎncă nu există evaluări
- D Statcom ThesisDocument7 paginiD Statcom Thesiscatherineaguirresaltlakecity100% (2)
- Reactive Power Compensation and Power Factor Correction by Reactive VAR CompensatorDocument5 paginiReactive Power Compensation and Power Factor Correction by Reactive VAR CompensatorEditor IJTSRDÎncă nu există evaluări
- Group 7 SVC and StatcomDocument15 paginiGroup 7 SVC and Statcomhamza mandlwiÎncă nu există evaluări
- Simulation of STATCOM For Voltage Profile ImprovementDocument10 paginiSimulation of STATCOM For Voltage Profile ImprovementAthul MvÎncă nu există evaluări
- Optimal Placement of STATCOM in Power SystemsDocument4 paginiOptimal Placement of STATCOM in Power SystemsWARSE JournalsÎncă nu există evaluări
- Analysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorDocument10 paginiAnalysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorSrinivasAnchalaÎncă nu există evaluări
- Applied Sciences: Application of A High-Power Reversible Converter in A Hybrid Traction Power Supply SystemDocument19 paginiApplied Sciences: Application of A High-Power Reversible Converter in A Hybrid Traction Power Supply SystemBhanu ThestarÎncă nu există evaluări
- Critique PaperDocument6 paginiCritique PaperChristian Allan LumakinÎncă nu există evaluări
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document8 paginiIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationÎncă nu există evaluări
- A Grid-Connected Dual Voltage Source InverterWith Power Quality Improvement Features PDFDocument9 paginiA Grid-Connected Dual Voltage Source InverterWith Power Quality Improvement Features PDFChristian Emenike100% (1)
- Reducing Source Current Harmonics Due To Balanced and Un-Balanced Voltage Variation With Fuzzy Controlled D-StatcomDocument14 paginiReducing Source Current Harmonics Due To Balanced and Un-Balanced Voltage Variation With Fuzzy Controlled D-StatcomJames MorenoÎncă nu există evaluări
- Paper 3Document6 paginiPaper 3Aadit JeyasankarÎncă nu există evaluări
- (Doi 10.1109/TPEL.2014.2310731) J. Galvez M. Ordonez - Swinging Bus Operation of Inverters For Fuel Cell Applications With Small DC-Link CapacitanceDocument12 pagini(Doi 10.1109/TPEL.2014.2310731) J. Galvez M. Ordonez - Swinging Bus Operation of Inverters For Fuel Cell Applications With Small DC-Link Capacitancesk.karimeeeÎncă nu există evaluări
- Power Quality Improvement in Modified Solid State Transformer System Using StatcomDocument6 paginiPower Quality Improvement in Modified Solid State Transformer System Using StatcomdevchandarÎncă nu există evaluări
- Design and Performance Analysis of a Low-Power Double-Tail ComparatorDocument5 paginiDesign and Performance Analysis of a Low-Power Double-Tail ComparatorSayantan RoyÎncă nu există evaluări
- Analysis of DC-Link Voltage Ripple in Voltage Source Inverters without Electrolytic CapacitorDocument9 paginiAnalysis of DC-Link Voltage Ripple in Voltage Source Inverters without Electrolytic CapacitorSung Ryoung LimÎncă nu există evaluări
- A Voltage Improvement of Transmission System Using Static Var Compensator Via Matlab/simulinkDocument9 paginiA Voltage Improvement of Transmission System Using Static Var Compensator Via Matlab/simulinkJorge RuizÎncă nu există evaluări
- Control of Three-Phase Inverter For AC Motor Drive With Small DC-Link Capacitor Fed by Single-Phase AC SourceDocument8 paginiControl of Three-Phase Inverter For AC Motor Drive With Small DC-Link Capacitor Fed by Single-Phase AC SourceAnand KumarÎncă nu există evaluări
- IMPROVEMENT OF POWER QUALITY USING STATCOMDocument8 paginiIMPROVEMENT OF POWER QUALITY USING STATCOMRtkÎncă nu există evaluări
- Bi-Directional AC-DC/DC-AC Converter For Power Sharing of Hybrid AC/DC SystemsDocument8 paginiBi-Directional AC-DC/DC-AC Converter For Power Sharing of Hybrid AC/DC SystemsJitender KaushalÎncă nu există evaluări
- Power Upgrading of Transmission Line by Combining AC DC Transmission and Analysis of UPFCDocument3 paginiPower Upgrading of Transmission Line by Combining AC DC Transmission and Analysis of UPFCEditor IJTSRDÎncă nu există evaluări
- Optimal TCSC Placement for Power System StabilityDocument13 paginiOptimal TCSC Placement for Power System StabilityBelayneh TadesseÎncă nu există evaluări
- Fuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Document6 paginiFuzzy Based Supervision of DC Link PI Control in A DSTATCOM 2008Dhammunodu MlaÎncă nu există evaluări
- Harmonic Analysis of Grid Connected Power Electronic Systems in Low Voltage Distribution NetworksDocument10 paginiHarmonic Analysis of Grid Connected Power Electronic Systems in Low Voltage Distribution NetworksRia AlexÎncă nu există evaluări
- Modeling and Simulation of Distribution Network with Solar Inverter InterconnectionDocument8 paginiModeling and Simulation of Distribution Network with Solar Inverter InterconnectionAli HadiÎncă nu există evaluări
- Transient Stability Investigations of The Wind-Diesel Hybrid PowerDocument21 paginiTransient Stability Investigations of The Wind-Diesel Hybrid Powerrasim_m1146Încă nu există evaluări
- Computer Methods in Power Systems Analysis with MATLABDe la EverandComputer Methods in Power Systems Analysis with MATLABÎncă nu există evaluări
- IJSRD - International Journal for Scientific Research & Development| Vol. 5, Issue 10, 2017 | ISSN (online): 2321-0613Document3 paginiIJSRD - International Journal for Scientific Research & Development| Vol. 5, Issue 10, 2017 | ISSN (online): 2321-0613Sento IsuzuÎncă nu există evaluări
- Grounding Report Cunanan Colat Custodio PDFDocument15 paginiGrounding Report Cunanan Colat Custodio PDFSento IsuzuÎncă nu există evaluări
- Original PDFDocument3 paginiOriginal PDFMaxamedÎncă nu există evaluări
- Combinational Logic Circuits - Arithmetic and Code ConversionDocument44 paginiCombinational Logic Circuits - Arithmetic and Code ConversionSento IsuzuÎncă nu există evaluări
- TransformersDocument24 paginiTransformersWonbae ChoiÎncă nu există evaluări
- Grounding Report Cunanan Colat Custodio PDFDocument15 paginiGrounding Report Cunanan Colat Custodio PDFSento IsuzuÎncă nu există evaluări
- Grounding Report Cunanan Colat Custodio PDFDocument15 paginiGrounding Report Cunanan Colat Custodio PDFSento IsuzuÎncă nu există evaluări
- Distribution TransformersDocument7 paginiDistribution TransformerstreyjonÎncă nu există evaluări
- Standard Bulk Truck Installation GuideDocument44 paginiStandard Bulk Truck Installation GuidePhilip HoferÎncă nu există evaluări
- Murata Products Microwave Coaxial Connector O33eDocument3 paginiMurata Products Microwave Coaxial Connector O33ealltheloveintheworldÎncă nu există evaluări
- Symmetrical Fault Analysis LectureDocument9 paginiSymmetrical Fault Analysis LectureSimran GiriÎncă nu există evaluări
- Sample of Residential Load Computation For Power System AnalysisDocument4 paginiSample of Residential Load Computation For Power System AnalysisMarvin GagarinÎncă nu există evaluări
- Etic414 PDFDocument1 paginăEtic414 PDFjgssb85Încă nu există evaluări
- K241 AwebnotesDocument3 paginiK241 Awebnotespetre_blackÎncă nu există evaluări
- URA Elect SR 2005 03Document55 paginiURA Elect SR 2005 03Zhu Qi WangÎncă nu există evaluări
- Oral Ques AnsDocument182 paginiOral Ques AnsDheeranÎncă nu există evaluări
- EC-8001 VLSI Design Subject OverviewDocument12 paginiEC-8001 VLSI Design Subject OverviewAbhinav Pratap SinghÎncă nu există evaluări
- Capacitor Bank PDFDocument9 paginiCapacitor Bank PDFpcelisÎncă nu există evaluări
- Test Blocks and Plugs GuideDocument3 paginiTest Blocks and Plugs GuideOlian GuimarãesÎncă nu există evaluări
- CIRATA Excitation System Operation and Maintenance ManualDocument41 paginiCIRATA Excitation System Operation and Maintenance Manualmozaix man100% (1)
- Installation and Service Instructions 12 ... 36 KV - 630 ... 3150 A - 16 ... 50 KaDocument118 paginiInstallation and Service Instructions 12 ... 36 KV - 630 ... 3150 A - 16 ... 50 KaEkanit ChuaykoedÎncă nu există evaluări
- Omron P2RF 08 E DatasheetDocument11 paginiOmron P2RF 08 E DatasheetAgus Itonk SuwardonoÎncă nu există evaluări
- Experiment-1 Title: Diode As Clipper & Clamper Circuit ObjectivesDocument11 paginiExperiment-1 Title: Diode As Clipper & Clamper Circuit ObjectivesGPA Innovation LabÎncă nu există evaluări
- Georgia Tech Zig Zag Grounding TransformersDocument12 paginiGeorgia Tech Zig Zag Grounding TransformerslcatelaniÎncă nu există evaluări
- 3RV1341 4JC10 Datasheet enDocument4 pagini3RV1341 4JC10 Datasheet enRiskaÎncă nu există evaluări
- Sizing Calculations For 20/3.3 KV, 12.5 MVA Transformer Feeder CableDocument9 paginiSizing Calculations For 20/3.3 KV, 12.5 MVA Transformer Feeder CableNeomax BuildersÎncă nu există evaluări
- The Wiring Rules: Motor ProtectionDocument6 paginiThe Wiring Rules: Motor ProtectionFuji Electric SMBEÎncă nu există evaluări
- LTC 1267 FDocument1 paginăLTC 1267 FEdson HenriqueÎncă nu există evaluări
- Experiment 3: N-Channel Jfet Characteristics: ED Sem IiiDocument6 paginiExperiment 3: N-Channel Jfet Characteristics: ED Sem IiiDipankar PokhrelÎncă nu există evaluări
- Nord BU0500 - GB - 1013Document180 paginiNord BU0500 - GB - 1013Carlos RodriguesÎncă nu există evaluări
- SG8957AE4,0311E3,9310E4,9320E4,8751E3 Control Box ManualDocument8 paginiSG8957AE4,0311E3,9310E4,9320E4,8751E3 Control Box ManualAlex MedinaÎncă nu există evaluări
- EEE1001 Part 1: DC MachinesDocument73 paginiEEE1001 Part 1: DC MachinesAbdulrahman JaliliÎncă nu există evaluări
- EMRAX 208 Datasheet A00Document2 paginiEMRAX 208 Datasheet A00Kylo RenÎncă nu există evaluări
- Interrupt or Ter Mom Agn É Tico SquaredDocument272 paginiInterrupt or Ter Mom Agn É Tico SquaredDaniel MendozaÎncă nu există evaluări
- P01O274001V - DH Airport Fuel Tank Farm Gate21GH - Electrical One Line DiagramDocument1 paginăP01O274001V - DH Airport Fuel Tank Farm Gate21GH - Electrical One Line DiagramShahed HussainÎncă nu există evaluări
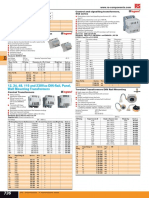
- Transformers: 12, 24, 48, 115 and 230vac DIN-Rail, Panel, Wall Mounting TransformersDocument1 paginăTransformers: 12, 24, 48, 115 and 230vac DIN-Rail, Panel, Wall Mounting TransformersЛеха ЯнчукÎncă nu există evaluări
- HT TransformerDocument6 paginiHT TransformerMaintenance CircleÎncă nu există evaluări