S-ar putea să vă placă și
- Delta Instruments Regulator PIDDocument7 paginiDelta Instruments Regulator PIDRuth Alma CotrutaÎncă nu există evaluări
- JLD614 ManualDocument8 paginiJLD614 ManualJ.R. VincentÎncă nu există evaluări
- Thème: Simulation Et Identification D'un Boucle de Régulation CascadeDocument24 paginiThème: Simulation Et Identification D'un Boucle de Régulation CascadeAmineHirtsiÎncă nu există evaluări
- TET-612 Temperature Controller Instruction ManualDocument7 paginiTET-612 Temperature Controller Instruction ManualDaniel HunterÎncă nu există evaluări
- 02 PIDcontroller PDFDocument5 pagini02 PIDcontroller PDFZugravu AndreiÎncă nu există evaluări
- Instruction Manual: 1. Product HighlightsDocument7 paginiInstruction Manual: 1. Product HighlightsNick RossÎncă nu există evaluări
- User's Manual User's ManualDocument52 paginiUser's Manual User's ManualalfalvaÎncă nu există evaluări
- Classic Control and Compensators.-: Ut Et T Et DT + T Det DTDocument19 paginiClassic Control and Compensators.-: Ut Et T Et DT + T Det DTEdnna LpÎncă nu există evaluări
- 2-1 1Document108 pagini2-1 1gli7amiciÎncă nu există evaluări
- Task2 1 Specific Training-EnDocument35 paginiTask2 1 Specific Training-EnSantiago LarrazÎncă nu există evaluări
- PracticalDocument10 paginiPracticalSec ArcÎncă nu există evaluări
- Application Note AN2208: Universal PID-ThermoregulatorDocument17 paginiApplication Note AN2208: Universal PID-ThermoregulatorJ Daniel PichardoÎncă nu există evaluări
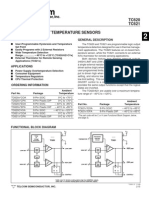
- TC620 TC621 5V, Dual Trip Point Temperature Sensors: Features General DescriptionDocument6 paginiTC620 TC621 5V, Dual Trip Point Temperature Sensors: Features General Descriptionmiki983Încă nu există evaluări
- Marine Engine Components and SystemsDocument37 paginiMarine Engine Components and SystemsjibvÎncă nu există evaluări
- JLD612 ManualDocument8 paginiJLD612 ManualEvTech PhilÎncă nu există evaluări
- PID Furnace Temp ControlDocument11 paginiPID Furnace Temp ControlashishÎncă nu există evaluări
- TEC-8A-24V-PID-HC Operating ManualDocument21 paginiTEC-8A-24V-PID-HC Operating ManualSarah Joy ManimtimÎncă nu există evaluări
- DS1621 Digital Thermometer and Thermostat Technical ReferenceDocument16 paginiDS1621 Digital Thermometer and Thermostat Technical ReferenceAnisur RahmanÎncă nu există evaluări
- Instructions for Use of LD-B10 Series Temperature controllerDocument25 paginiInstructions for Use of LD-B10 Series Temperature controllerCasting Ctvt100% (1)
- JLD612 Manual 2011Document8 paginiJLD612 Manual 2011cacaÎncă nu există evaluări
- Metodo de Ziegler-NicholsDocument3 paginiMetodo de Ziegler-Nicholsjuan daniel camas cruzÎncă nu există evaluări
- N2006P PID Installation & WiringDocument8 paginiN2006P PID Installation & WiringFarlepÎncă nu există evaluări
- Room RH TransmitterDocument4 paginiRoom RH TransmitterIrpan NugrahaÎncă nu există evaluări
- TC410Document2 paginiTC410RICHARDÎncă nu există evaluări
- Diagnostic Trouble Codes (DTC) : DTC P0712 Transmission Fluid Temperature Sensor Circuit Low Input (High Temperature)Document4 paginiDiagnostic Trouble Codes (DTC) : DTC P0712 Transmission Fluid Temperature Sensor Circuit Low Input (High Temperature)luis eduardo corzo enriquezÎncă nu există evaluări
- PID Controller PDFDocument5 paginiPID Controller PDFprasadÎncă nu există evaluări
- Instrukcja Home ENDocument24 paginiInstrukcja Home ENN. P.Încă nu există evaluări
- DTA04 - 모터 서미스터 릴레이Document6 paginiDTA04 - 모터 서미스터 릴레이정정호Încă nu există evaluări
- Temperature Control: On-Off ControllerDocument9 paginiTemperature Control: On-Off Controllerdivyansh kashyapÎncă nu există evaluări
- LAN CONTROLLER Instruction From 2.30: Restarter, Monitor, Watchdog, ControllerDocument15 paginiLAN CONTROLLER Instruction From 2.30: Restarter, Monitor, Watchdog, ControllerNadir SertÎncă nu există evaluări
- Week 10-Feedback ControlDocument34 paginiWeek 10-Feedback ControlMohd Aizad100% (1)
- Product 071 ECDocument5 paginiProduct 071 ECALSIN Technology ServicesÎncă nu există evaluări
- Control PanelDocument9 paginiControl PanelPEMELIHARAAN LISTRIKÎncă nu există evaluări
- Digital Temperature Controller User's GuideDocument4 paginiDigital Temperature Controller User's GuideChristopher GarciaÎncă nu există evaluări
- Temperature ControllerDocument22 paginiTemperature ControllernehalÎncă nu există evaluări
- Lab Experiment # 10: Demonstration of Ziegler-Nichols Method For Tuning of PID Controller in Matlab ObjectiveDocument10 paginiLab Experiment # 10: Demonstration of Ziegler-Nichols Method For Tuning of PID Controller in Matlab ObjectiveAsad saeedÎncă nu există evaluări
- JLD612 ManualDocument7 paginiJLD612 ManualtellnerÎncă nu există evaluări
- Pid CernDocument98 paginiPid CernsybaritzÎncă nu există evaluări
- Single Output Thermostat or Humidistat Single Output Thermostat or HumidistatDocument1 paginăSingle Output Thermostat or Humidistat Single Output Thermostat or HumidistatCarlos MaicanÎncă nu există evaluări
- Series Temperature Controller Instruction Sheet: PrecautionDocument14 paginiSeries Temperature Controller Instruction Sheet: PrecautionBen farah AymenÎncă nu există evaluări
- Tecnologic TDR 26 Microprocessor-Based Digital Electronic Freezer ControllerDocument7 paginiTecnologic TDR 26 Microprocessor-Based Digital Electronic Freezer ControllerMaksims TarasovsÎncă nu există evaluări
- Exp7 Temparature ControllerDocument4 paginiExp7 Temparature ControllerKathireddy Shashank reddyÎncă nu există evaluări
- 20 THDocument28 pagini20 THujjwal kumarÎncă nu există evaluări
- Synopsis - Temperature Measurement and ControllerDocument2 paginiSynopsis - Temperature Measurement and ControllerPreetam WalkeÎncă nu există evaluări
- Logik16: Handbook Electronic Controller Logika Control S.R.LDocument20 paginiLogik16: Handbook Electronic Controller Logika Control S.R.LЕмил Гаврилов100% (5)
- Product 074 ECDocument3 paginiProduct 074 ECALSIN Technology ServicesÎncă nu există evaluări
- ThermocoupleDocument18 paginiThermocoupleMuhammad IftikharÎncă nu există evaluări
- 2-Phase Stepper-Motor Driver TLE 4728 G: Bipolar-IC FeaturesDocument26 pagini2-Phase Stepper-Motor Driver TLE 4728 G: Bipolar-IC FeaturesMohammad RanjbarÎncă nu există evaluări
- Feedback Controller: Proportional, Integral, Derivative (PID)Document34 paginiFeedback Controller: Proportional, Integral, Derivative (PID)Ereen100% (1)
- Temperature Controller Catalog - EngDocument9 paginiTemperature Controller Catalog - EngJuan Gervacio OrtegaÎncă nu există evaluări
- AL24A1T: Room ControllerDocument2 paginiAL24A1T: Room Controllerforevertay2000Încă nu există evaluări
- PRiCO User Manual 03 04 2009Document16 paginiPRiCO User Manual 03 04 2009Mala BarnaÎncă nu există evaluări
- Water Temperature Control Using Siemens PLC and HMIDocument9 paginiWater Temperature Control Using Siemens PLC and HMIMunimÎncă nu există evaluări
- DTC Summaries: WWW - Bmwpost.ru - JOIN US!!!Document7 paginiDTC Summaries: WWW - Bmwpost.ru - JOIN US!!!Александр АлександрÎncă nu există evaluări
- 1333 mpr500 ManDocument7 pagini1333 mpr500 ManTan VuÎncă nu există evaluări
- Microprocessor-Based Digital Electronic Controller: Vr. 01 (I - GB) - Cod.: ISTR 00540Document5 paginiMicroprocessor-Based Digital Electronic Controller: Vr. 01 (I - GB) - Cod.: ISTR 00540Oscar Fuentes QuiñilenÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Ethernet Port - Computer PortsDocument3 paginiEthernet Port - Computer PortsSoumojit MukhopadhyayÎncă nu există evaluări
- Ims EngDocument16 paginiIms EngSoumojit MukhopadhyayÎncă nu există evaluări
- Ethernet Cables - RJ45 - Colors & Crossover - B&B ElectronicsDocument2 paginiEthernet Cables - RJ45 - Colors & Crossover - B&B ElectronicsSoumojit MukhopadhyayÎncă nu există evaluări
- Analog Output of PLCDocument14 paginiAnalog Output of PLCSoumojit MukhopadhyayÎncă nu există evaluări
- Ims Eng PDFDocument11 paginiIms Eng PDFagmgmscÎncă nu există evaluări
- RSLogixComparison PDFDocument2 paginiRSLogixComparison PDFMohan RajÎncă nu există evaluări
- Telecommunication SystemsDocument28 paginiTelecommunication SystemsSoumojit MukhopadhyayÎncă nu există evaluări
- Basic of Telecommuni Cation: Prepared By: Hannah May Rosales Prepared To: Ms. Geraldine MalloDocument12 paginiBasic of Telecommuni Cation: Prepared By: Hannah May Rosales Prepared To: Ms. Geraldine MalloSoumojit MukhopadhyayÎncă nu există evaluări
- 01 Fundamentals of Telecommunications PDFDocument40 pagini01 Fundamentals of Telecommunications PDFRonald GreavesÎncă nu există evaluări
- Nopÿ Q6Rÿ NSR.T QU/ S6ÿ V5R35: Fe Z9AX L - 9@ÿZBLJ9ADocument4 paginiNopÿ Q6Rÿ NSR.T QU/ S6ÿ V5R35: Fe Z9AX L - 9@ÿZBLJ9ASoumojit MukhopadhyayÎncă nu există evaluări
- NokiakpiandcoreoptimizationDocument69 paginiNokiakpiandcoreoptimizationeduy2k100% (2)
- Job SeekersDocument28 paginiJob Seekersdglsaravanaa4125Încă nu există evaluări
- Cause Codes From NetworkDocument10 paginiCause Codes From NetworkSoumojit MukhopadhyayÎncă nu există evaluări
- IP Multimedia Subsystem - WikipediaDocument14 paginiIP Multimedia Subsystem - WikipediaSoumojit MukhopadhyayÎncă nu există evaluări
- Autodesk 2015 All Product Keys Collection - AppNee Freeware Picks, Reviews & RatingsDocument8 paginiAutodesk 2015 All Product Keys Collection - AppNee Freeware Picks, Reviews & RatingsSoumojit MukhopadhyayÎncă nu există evaluări
- 8085/8086 Microprocessor Based Systems DesignDocument3 pagini8085/8086 Microprocessor Based Systems DesignSoumojit MukhopadhyayÎncă nu există evaluări
- Principle of CombinerDocument11 paginiPrinciple of CombinerSoumojit MukhopadhyayÎncă nu există evaluări
- Electrical Engineering Portal Com Electrical Thumb Rules You Must Follow Part 4Document11 paginiElectrical Engineering Portal Com Electrical Thumb Rules You Must Follow Part 4m khÎncă nu există evaluări
- NQE 2008 PhysicsDocument12 paginiNQE 2008 Physicsjoebloggs_comÎncă nu există evaluări
- CRANKSHAFT POSITION (CKP) SENSOR INSPECTION (ZJ, Z6) - Mazda 3 Workshop ManualDocument1 paginăCRANKSHAFT POSITION (CKP) SENSOR INSPECTION (ZJ, Z6) - Mazda 3 Workshop ManualyosnielÎncă nu există evaluări
- How The Coil Pack WorksDocument5 paginiHow The Coil Pack WorksStanley MasekoÎncă nu există evaluări
- Position Sensor: Type 1Document2 paginiPosition Sensor: Type 1Karsim BoimÎncă nu există evaluări
- Three-Phase Motor Drives: Electricity and New EnergyDocument44 paginiThree-Phase Motor Drives: Electricity and New EnergySONU KUMARÎncă nu există evaluări
- Mild Hybrid Electric Vehicle (MHEV) - Components (Continental)Document6 paginiMild Hybrid Electric Vehicle (MHEV) - Components (Continental)Rui MendesÎncă nu există evaluări
- Product Information Packet: 250HP, 1785RPM, 3PH, 60HZ, L449T, A44200M, TEFDocument17 paginiProduct Information Packet: 250HP, 1785RPM, 3PH, 60HZ, L449T, A44200M, TEFAriawan HasnanÎncă nu există evaluări
- Tutorial On Layout of Mixed-Signal CircuitsDocument29 paginiTutorial On Layout of Mixed-Signal CircuitsPetru NistorÎncă nu există evaluări
- Ysly Oz Ysly JZ EngDocument3 paginiYsly Oz Ysly JZ EngTrajkoÎncă nu există evaluări
- 1756 Controllogix Power Supplies Specifications: Technical DataDocument24 pagini1756 Controllogix Power Supplies Specifications: Technical DataNickÎncă nu există evaluări
- RELAY COORDINATION USING ETAP Ijariie12420Document9 paginiRELAY COORDINATION USING ETAP Ijariie12420Rakesh ShinganeÎncă nu există evaluări
- ASTM Conductor Spec SheetsDocument27 paginiASTM Conductor Spec Sheetsjavad4531Încă nu există evaluări
- Thermal Overload ProtectorDocument69 paginiThermal Overload ProtectorSai Printers100% (1)
- Fundamentals of Power Electronics Assignment SolutionsDocument5 paginiFundamentals of Power Electronics Assignment SolutionsDeep Gandhi100% (1)
- Digital Fiber Sensor Amplifier FX-301 (P) : WarningDocument4 paginiDigital Fiber Sensor Amplifier FX-301 (P) : WarningGaurav KÎncă nu există evaluări
- Isolation Permit SafetyDocument2 paginiIsolation Permit SafetyMohammed KadhimÎncă nu există evaluări
- Magnetic Circuits PDFDocument58 paginiMagnetic Circuits PDFImtiax LaghariÎncă nu există evaluări
- Ultra-Wideband Microstrip-Line Bandpass Filters With Good Out-of-Band Performance Using EBG-Embedded Multiple-Mode ResonatorDocument4 paginiUltra-Wideband Microstrip-Line Bandpass Filters With Good Out-of-Band Performance Using EBG-Embedded Multiple-Mode ResonatorShrutiAwasthiÎncă nu există evaluări
- Work Experience:: Jay-Ar Cuevas SalveDocument2 paginiWork Experience:: Jay-Ar Cuevas SalveJay-Ar Cuevas Salve100% (1)
- 4 Glynn and Devlin An X Band Gan Pa Mmic For PDocument8 pagini4 Glynn and Devlin An X Band Gan Pa Mmic For PRAJAÎncă nu există evaluări
- Double Layer LecturesDocument38 paginiDouble Layer LecturesKhaled AbeedÎncă nu există evaluări
- Sylvania 1976 Large Lamp Ordering GuideDocument52 paginiSylvania 1976 Large Lamp Ordering GuideAlan MastersÎncă nu există evaluări
- AN29160AA Product Standards Technical Data Sheet</TITLEDocument60 paginiAN29160AA Product Standards Technical Data Sheet</TITLEdimaÎncă nu există evaluări
- Free Electron Theory Relaxation Collision TimeDocument25 paginiFree Electron Theory Relaxation Collision TimeSuriya gadget guruÎncă nu există evaluări
- Vrla Agm Lead Acid Fiamm Batteries Fiamm Monolite Type: 2sla250 / 2sla300Document2 paginiVrla Agm Lead Acid Fiamm Batteries Fiamm Monolite Type: 2sla250 / 2sla300Muhamad YasrinÎncă nu există evaluări
- TdaDocument7 paginiTdaΠΑΝΑΓΙΩΤΗΣΠΑΝΑΓΟΣÎncă nu există evaluări
- Using Labview To Measure Temperature With A ThermistorDocument18 paginiUsing Labview To Measure Temperature With A ThermistorjdaudpotoÎncă nu există evaluări
- Scitronics - Metal - Detector - TMD1080 1Document4 paginiScitronics - Metal - Detector - TMD1080 1Fernando BarrosÎncă nu există evaluări
- Fiber Optic CommunicationsDocument2 paginiFiber Optic CommunicationsDossDossÎncă nu există evaluări