S-ar putea să vă placă și
- Syllable Division Rules - Sarah's Teaching SnippetsDocument35 paginiSyllable Division Rules - Sarah's Teaching SnippetsmauricetappaÎncă nu există evaluări
- J51 PDFDocument8 paginiJ51 PDFmauricetappaÎncă nu există evaluări
- Adaptive Control Using Neural Networks and Approximate ModelsDocument11 paginiAdaptive Control Using Neural Networks and Approximate ModelsmauricetappaÎncă nu există evaluări
- Nonlinear Adaptive Wavelet Control Using Constructive Wavelet NetworksDocument13 paginiNonlinear Adaptive Wavelet Control Using Constructive Wavelet NetworksmauricetappaÎncă nu există evaluări
- A Direct Adaptive Neural-Network Control For Unknown Nonlinear Systems and Its ApplicationDocument8 paginiA Direct Adaptive Neural-Network Control For Unknown Nonlinear Systems and Its ApplicationmauricetappaÎncă nu există evaluări
- SVPWM PDFDocument5 paginiSVPWM PDFmauricetappaÎncă nu există evaluări
- Wavelet Adaptive Backstepping Control For A Class of Nonlinear SystemsDocument9 paginiWavelet Adaptive Backstepping Control For A Class of Nonlinear SystemsmauricetappaÎncă nu există evaluări
- Adaptive Fuzzy Wavelet Network Control Design For Nonlinear SystemsDocument28 paginiAdaptive Fuzzy Wavelet Network Control Design For Nonlinear SystemsmauricetappaÎncă nu există evaluări
- July 10, 2008 13:32 WSPC/181-IJWMIP 00249: Intelligent Optimal Control of Robotic Manipulators Using WaveletsDocument18 paginiJuly 10, 2008 13:32 WSPC/181-IJWMIP 00249: Intelligent Optimal Control of Robotic Manipulators Using WaveletsmauricetappaÎncă nu există evaluări
- Modulation MLIDocument5 paginiModulation MLImauricetappaÎncă nu există evaluări
- IEEE Transactions On Magnetics Volume 22 Issue 5 1986 (Doi 10.1109 - Tmag.1986.1064466) Sebastian, T. Slemon, G. Rahman, M. - Modelling of Permanent Magnet Synchronous MotorsDocument3 paginiIEEE Transactions On Magnetics Volume 22 Issue 5 1986 (Doi 10.1109 - Tmag.1986.1064466) Sebastian, T. Slemon, G. Rahman, M. - Modelling of Permanent Magnet Synchronous MotorsmauricetappaÎncă nu există evaluări
- Usnn RepDocument12 paginiUsnn RepmauricetappaÎncă nu există evaluări
- Identification and Control of Dynamical Systems Using Neural Network PDFDocument24 paginiIdentification and Control of Dynamical Systems Using Neural Network PDFmauricetappaÎncă nu există evaluări
- Cluster Center Initialization Algorithm For K-Means ClusteringDocument10 paginiCluster Center Initialization Algorithm For K-Means ClusteringmauricetappaÎncă nu există evaluări
- Hybrid Training Algorithm For RBF Network: M. Y. MashorDocument17 paginiHybrid Training Algorithm For RBF Network: M. Y. MashormauricetappaÎncă nu există evaluări
- Isolated Word Recognition Using LPC & Vector Quantization: M. K. Linga Murthy, G.L.N. MurthyDocument4 paginiIsolated Word Recognition Using LPC & Vector Quantization: M. K. Linga Murthy, G.L.N. MurthymauricetappaÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Optiplex 9020 Desktop Owner's Manual en UsDocument59 paginiOptiplex 9020 Desktop Owner's Manual en Usjay0154Încă nu există evaluări
- LANmark 6 Shielded CableDocument4 paginiLANmark 6 Shielded CableRedouan MilanistaÎncă nu există evaluări
- CH X350PKDocument8 paginiCH X350PKGustavoÎncă nu există evaluări
- Implementation of Different Flip-Flop Circuits (S-R, JK, D Flip Flop) Using Logic Gates.Document5 paginiImplementation of Different Flip-Flop Circuits (S-R, JK, D Flip Flop) Using Logic Gates.Mohayminul Al-HamimÎncă nu există evaluări
- Computer Networks MCQSDocument3 paginiComputer Networks MCQSKashaf AmreenÎncă nu există evaluări
- Samsung ElectronicsDocument8 paginiSamsung ElectronicsrafaelariesÎncă nu există evaluări
- Codevision AVR Serial Parallel Parallel CodevisionDocument8 paginiCodevision AVR Serial Parallel Parallel Codevisionmehrdad heydariÎncă nu există evaluări
- Technical Note MD MODBUS Protocol Rev23eDocument7 paginiTechnical Note MD MODBUS Protocol Rev23eMallampati RamakrishnaÎncă nu există evaluări
- 0415 Guitar SynthDocument6 pagini0415 Guitar Synthtaufik akbarÎncă nu există evaluări
- Analog Digital Electronics (ADE) - Sequential CircuitsDocument33 paginiAnalog Digital Electronics (ADE) - Sequential CircuitsCheekuri DineshÎncă nu există evaluări
- MFJ Enterprises, Inc.: Instruction ManualDocument8 paginiMFJ Enterprises, Inc.: Instruction ManualBenjamin DoverÎncă nu există evaluări
- Best Battery Sizing ExamplesDocument40 paginiBest Battery Sizing Examplestllmal002Încă nu există evaluări
- Mmic Sot 343 Marking CodeDocument4 paginiMmic Sot 343 Marking Codeckean_ngÎncă nu există evaluări
- Compact PLC OMRON PDFDocument96 paginiCompact PLC OMRON PDFmangyanÎncă nu există evaluări
- HP ROM Based Setup Utility User GuideDocument221 paginiHP ROM Based Setup Utility User GuideAlbin JosephÎncă nu există evaluări
- InstallationDocument63 paginiInstallational nakheel electronicsÎncă nu există evaluări
- V.G.Sabu. PhD. Thesis Presentation PDFDocument202 paginiV.G.Sabu. PhD. Thesis Presentation PDFSHIVANK VARSHNEYÎncă nu există evaluări
- Harmony Ipc - Hmibmiea5dd1e01Document5 paginiHarmony Ipc - Hmibmiea5dd1e01Debdip DasÎncă nu există evaluări
- When A Party Makes A Local Telephone Call To Another PartyDocument5 paginiWhen A Party Makes A Local Telephone Call To Another PartyAniqa AfzalÎncă nu există evaluări
- Datasheet LM393Document9 paginiDatasheet LM393Murilo MarquesÎncă nu există evaluări
- VN750 / VN750S VN750PT / VN750-B5: High Side DriverDocument31 paginiVN750 / VN750S VN750PT / VN750-B5: High Side DriverDan EsentherÎncă nu există evaluări
- Arduino Programming Using MATLAB - Agus KurniawanDocument77 paginiArduino Programming Using MATLAB - Agus KurniawanPablo Colque100% (6)
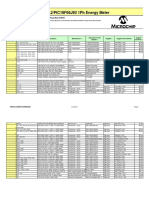
- Bill of Materials MCP6L2/PIC18F66J93 1Ph Energy MeterDocument3 paginiBill of Materials MCP6L2/PIC18F66J93 1Ph Energy Meteriskandarn_el5735Încă nu există evaluări
- Manual AVH-X595BT Rev0 1Document196 paginiManual AVH-X595BT Rev0 1Julio OliverosÎncă nu există evaluări
- A8 Resistors in Series and ParallelDocument4 paginiA8 Resistors in Series and ParallelAndrei NicolasÎncă nu există evaluări
- E15818 Rog Crosshair Viii Impact Um V2 WebDocument106 paginiE15818 Rog Crosshair Viii Impact Um V2 WebdanielÎncă nu există evaluări
- SR1200 Server ConfigDocument8 paginiSR1200 Server Configmev sterÎncă nu există evaluări
- Pulse Synthesis: Shock Response Spectrum Pulse SoftwareDocument1 paginăPulse Synthesis: Shock Response Spectrum Pulse SoftwareJHON ANGEL VARGAS HUAHUASONCCOÎncă nu există evaluări
- Assignment 1 Networking Hardware Analysis (A22hp0108)Document13 paginiAssignment 1 Networking Hardware Analysis (A22hp0108)danishakimiÎncă nu există evaluări
- Calibration of AmmeterDocument4 paginiCalibration of Ammeterpks_facebook33% (3)