S-ar putea să vă placă și
- Some Remarks On The Riemann Zeta DistributionDocument12 paginiSome Remarks On The Riemann Zeta DistributionAlejandro GafÎncă nu există evaluări
- TW Ycm01265958803Document62 paginiTW Ycm0126595880313239563Încă nu există evaluări
- Shs Core Subjects MelcsDocument63 paginiShs Core Subjects MelcsRoldan Merjudio100% (1)
- 2 2.transfer FunctionDocument60 pagini2 2.transfer FunctionEngenheiro TeslandoÎncă nu există evaluări
- International Law of The Sea: 1.1. What Is It?Document21 paginiInternational Law of The Sea: 1.1. What Is It?Clark Kenntt50% (2)
- Homework 8 - SolutionDocument8 paginiHomework 8 - SolutionMaricarmen GalvezaÎncă nu există evaluări
- Linear Systems Frequency Response AnalysisDocument7 paginiLinear Systems Frequency Response AnalysisBalaChaitanyaÎncă nu există evaluări
- Freq ResponseDocument23 paginiFreq Responselili aboudÎncă nu există evaluări
- ME 3281 Spring 2013 Prof Rajamani Step Response Impulse ResponseDocument3 paginiME 3281 Spring 2013 Prof Rajamani Step Response Impulse ResponseAkashÎncă nu există evaluări
- ME 3281 Spring 2013 Prof Rajamani Step Response Impulse ResponseDocument3 paginiME 3281 Spring 2013 Prof Rajamani Step Response Impulse ResponseAkashÎncă nu există evaluări
- Polar Plot of Frequency ResponseDocument5 paginiPolar Plot of Frequency ResponseDilip GÎncă nu există evaluări
- ST903 Week4solDocument2 paginiST903 Week4solLuke JohnstonÎncă nu există evaluări
- CHP 4Document104 paginiCHP 4million shiferawÎncă nu există evaluări
- The Fourier Series of A Periodic FunctionDocument26 paginiThe Fourier Series of A Periodic FunctionMahalakshmiSaravanaÎncă nu există evaluări
- Signals & Systems MCQs - Properties of Fourier TransformsDocument4 paginiSignals & Systems MCQs - Properties of Fourier Transformszohaib100% (1)
- R(S) C(S)Document16 paginiR(S) C(S)Ananthan SrijithÎncă nu există evaluări
- Chap2 PDFDocument31 paginiChap2 PDFYashi SrivastavaÎncă nu există evaluări
- Lecture 10 B: Freq. Response of LTI Systems, Phase & Group Delay, Inverse SystemsDocument6 paginiLecture 10 B: Freq. Response of LTI Systems, Phase & Group Delay, Inverse SystemsIamINÎncă nu există evaluări
- Final Exam, Stochastic Processes: Hai Le, ID: 998010705Document2 paginiFinal Exam, Stochastic Processes: Hai Le, ID: 998010705Hai LeÎncă nu există evaluări
- Radiative capture reactions: A theoretical overviewDocument46 paginiRadiative capture reactions: A theoretical overviewMohammed H. SalemÎncă nu există evaluări
- Ivp HandoutDocument101 paginiIvp HandoutLucas SantosÎncă nu există evaluări
- Week 4Document2 paginiWeek 4jeekfidÎncă nu există evaluări
- Fourier Relations in OpticsDocument11 paginiFourier Relations in OpticsLauren StevensonÎncă nu există evaluări
- Some New Riemann-Liouville Fractional Integral Inequalities: Jessada TariboonDocument11 paginiSome New Riemann-Liouville Fractional Integral Inequalities: Jessada TariboonLuis Alberto FuentesÎncă nu există evaluări
- Frequency Response Analysis & Control System Design: CHME 624 Advance Process Dynamic Modelling & ControlDocument25 paginiFrequency Response Analysis & Control System Design: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriÎncă nu există evaluări
- Tutorial 6 - CT Fourier Transform (Solutions) PDFDocument9 paginiTutorial 6 - CT Fourier Transform (Solutions) PDFAna Maria Muñoz GonzalezÎncă nu există evaluări
- EE320A Solutions For Tutorial 2Document14 paginiEE320A Solutions For Tutorial 2Ananya AgarwalÎncă nu există evaluări
- Wavelet Tour CorrectionsDocument48 paginiWavelet Tour CorrectionsarthurseveralÎncă nu există evaluări
- DSP Solutions Section 1Document11 paginiDSP Solutions Section 1Mukesh KumarÎncă nu există evaluări
- Liu Et Al-2018-Journal of Applied Econometrics - Sup-1Document9 paginiLiu Et Al-2018-Journal of Applied Econometrics - Sup-1Grant HeilemanÎncă nu există evaluări
- Application of Incomplete H-Functions in Determination of Lambert's LawDocument9 paginiApplication of Incomplete H-Functions in Determination of Lambert's LawAnkitÎncă nu există evaluări
- 9781107059320-SOLUTIONS Essential Digital SolutionsDocument47 pagini9781107059320-SOLUTIONS Essential Digital SolutionsGulrez MÎncă nu există evaluări
- Unit 2 - Signal SystemDocument69 paginiUnit 2 - Signal SystemAnitha DenisÎncă nu există evaluări
- Stability: Dr. Wenjie DongDocument85 paginiStability: Dr. Wenjie DongMd Nur-A-Adam DonyÎncă nu există evaluări
- RC2017 Signals and Systems Homework 8Document7 paginiRC2017 Signals and Systems Homework 8ferdi tayfun100% (1)
- 2016 Exam 3 SolutionDocument6 pagini2016 Exam 3 Solution김명주Încă nu există evaluări
- Higher Order Open-Loop SystemDocument5 paginiHigher Order Open-Loop SystemCarmela HaliliÎncă nu există evaluări
- Communication SystemDocument28 paginiCommunication Systemgetachew hagosÎncă nu există evaluări
- Chapter 5. Bayesian Statistics (II)Document30 paginiChapter 5. Bayesian Statistics (II)freeeebooksÎncă nu există evaluări
- ECE45 HW3 SolutionsJDocument13 paginiECE45 HW3 SolutionsJDavid IonÎncă nu există evaluări
- Digital Signal Processing: Solved HW For Day 11Document23 paginiDigital Signal Processing: Solved HW For Day 11Cuau SuarezÎncă nu există evaluări
- Derivation of Peak TimeDocument1 paginăDerivation of Peak TimeIman SatriaÎncă nu există evaluări
- Time Series Exam, 2010: SolutionsDocument4 paginiTime Series Exam, 2010: Solutions강주성Încă nu există evaluări
- Laplace Transform Rules for Derivatives, Integrals and ODEsDocument14 paginiLaplace Transform Rules for Derivatives, Integrals and ODEslardhanÎncă nu există evaluări
- IIT Kanpur tutorial examines Fourier series propertiesDocument8 paginiIIT Kanpur tutorial examines Fourier series propertiesRuchika WaskleÎncă nu există evaluări
- Exercise Signal Processing 5Document21 paginiExercise Signal Processing 5Max PieriniÎncă nu există evaluări
- Solutions to Chapter 2 Problems: Introduction to Communication SystemsDocument17 paginiSolutions to Chapter 2 Problems: Introduction to Communication SystemsSoumitra BhowmickÎncă nu există evaluări
- Computational Biology Project ReportDocument15 paginiComputational Biology Project ReportnathanÎncă nu există evaluări
- Part2 PDFDocument136 paginiPart2 PDFIntan nur alfiahÎncă nu există evaluări
- Exercises 7Document4 paginiExercises 7danÎncă nu există evaluări
- Representation of Bandpass SignalsDocument10 paginiRepresentation of Bandpass SignalsManoj GowdaÎncă nu există evaluări
- Lecture 2 DR Mohammed Salah LaplaceDocument56 paginiLecture 2 DR Mohammed Salah Laplaceyussra amerÎncă nu există evaluări
- Numerical Analysis II - Solving Initial Value Problems for ODEsDocument103 paginiNumerical Analysis II - Solving Initial Value Problems for ODEsAnyumiza InnocentÎncă nu există evaluări
- Moment-generating functions lectureDocument11 paginiMoment-generating functions lectureDavidÎncă nu există evaluări
- Signals and Systems Homework SolutionsDocument5 paginiSignals and Systems Homework SolutionsKhalil UllahÎncă nu există evaluări
- 2 ExercisesonFractionalCalculusinIR - 000 PDFDocument18 pagini2 ExercisesonFractionalCalculusinIR - 000 PDFWalaa AltamimiÎncă nu există evaluări
- Lec13 PDFDocument7 paginiLec13 PDFanilÎncă nu există evaluări
- Digital Control - Sheet 1 SolutionDocument14 paginiDigital Control - Sheet 1 SolutionHesham AbasÎncă nu există evaluări
- Introduction To Communication Systems 1st Edition Madhow Solutions ManualDocument18 paginiIntroduction To Communication Systems 1st Edition Madhow Solutions Manualbradleygillespieditcebswrf100% (15)
- Lecture11 PDFDocument22 paginiLecture11 PDFVrundÎncă nu există evaluări
- Chapter56 Laplace&TFDocument106 paginiChapter56 Laplace&TFfebri setyawanÎncă nu există evaluări
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesDe la EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
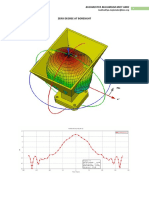
- Zero Degree at Boresight: Budhaditya Majumdar Miet AmieDocument6 paginiZero Degree at Boresight: Budhaditya Majumdar Miet Amiefarouq_razzaz2574Încă nu există evaluări
- Chapter5 150508221315 Lva1 App6891 PDFDocument38 paginiChapter5 150508221315 Lva1 App6891 PDFfarouq_razzaz2574Încă nu există evaluări
- Far-Field Divergence of A Vectorial Plane Wave Diffracted by A Circular Aperture From The Vectorial StructureDocument9 paginiFar-Field Divergence of A Vectorial Plane Wave Diffracted by A Circular Aperture From The Vectorial Structurefarouq_razzaz2574Încă nu există evaluări
- Radiation From Circular Waveguide Aperture Fields Using Complex Conical Wave ObjectsDocument4 paginiRadiation From Circular Waveguide Aperture Fields Using Complex Conical Wave Objectsfarouq_razzaz2574Încă nu există evaluări
- Antenna and Wave Propagation, 1/e: Book Information Sheet Book Information SheetDocument1 paginăAntenna and Wave Propagation, 1/e: Book Information Sheet Book Information Sheetfarouq_razzaz2574Încă nu există evaluări
- Progress in Electromagnetics Research Letters, Vol. 16, 119-129, 2010Document11 paginiProgress in Electromagnetics Research Letters, Vol. 16, 119-129, 2010farouq_razzaz2574Încă nu există evaluări
- Gain of A Circular Polarized Antenna PDFDocument2 paginiGain of A Circular Polarized Antenna PDFfarouq_razzaz2574Încă nu există evaluări
- Zero Degree at Boresight: Budhaditya Majumdar Miet AmieDocument6 paginiZero Degree at Boresight: Budhaditya Majumdar Miet Amiefarouq_razzaz2574Încă nu există evaluări
- Aperture Antenna Radiation: October 2003Document6 paginiAperture Antenna Radiation: October 2003farouq_razzaz2574Încă nu există evaluări
- Chap4 DTFTDocument15 paginiChap4 DTFTLtarm LamÎncă nu există evaluări
- A01 Dh2415-5815-Smaf N1117Document1 paginăA01 Dh2415-5815-Smaf N1117farouq_razzaz2574Încă nu există evaluări
- Ee522 Notes: Aperture Antennas: J N H M E N OnsDocument18 paginiEe522 Notes: Aperture Antennas: J N H M E N Onskayalvizhi sÎncă nu există evaluări
- Progress in Electromagnetics Research Letters, Vol. 16, 119-129, 2010Document11 paginiProgress in Electromagnetics Research Letters, Vol. 16, 119-129, 2010farouq_razzaz2574Încă nu există evaluări
- Digital Signal Processing EC-602 Contracts: 3L Credits - 3: Module - IDocument1 paginăDigital Signal Processing EC-602 Contracts: 3L Credits - 3: Module - Ifarouq_razzaz2574Încă nu există evaluări
- Gain of A Circular Polarized AntennaDocument2 paginiGain of A Circular Polarized Antennafarouq_razzaz2574Încă nu există evaluări
- Design of A UHF Pyramidal Horn Antenna Using CSTDocument13 paginiDesign of A UHF Pyramidal Horn Antenna Using CSTfarouq_razzaz2574Încă nu există evaluări
- Progress in Electromagnetics Research Letters, Vol. 20, 107-117, 2011Document11 paginiProgress in Electromagnetics Research Letters, Vol. 20, 107-117, 2011farouq_razzaz2574Încă nu există evaluări
- Dual Band Biplanar Quasi-Yagi Antenna With Inset Feed: Prachi Jain, Zohaib HasanDocument4 paginiDual Band Biplanar Quasi-Yagi Antenna With Inset Feed: Prachi Jain, Zohaib Hasanfarouq_razzaz2574Încă nu există evaluări
- Modeling in Time DomainDocument30 paginiModeling in Time Domainfarouq_razzaz2574Încă nu există evaluări
- Document 2 Gk6b 09052017Document5 paginiDocument 2 Gk6b 09052017farouq_razzaz2574Încă nu există evaluări
- Chapter 1Document50 paginiChapter 1farouq_razzaz2574Încă nu există evaluări
- Research Article: A Dual-Band Printed End-Fire Antenna With DSPSL FeedingDocument5 paginiResearch Article: A Dual-Band Printed End-Fire Antenna With DSPSL Feedingfarouq_razzaz2574Încă nu există evaluări
- Yagi AntennaDocument15 paginiYagi Antennafarouq_razzaz2574Încă nu există evaluări
- Image Processing MatlabDocument233 paginiImage Processing Matlabfarouq_razzaz2574Încă nu există evaluări
- Lecture Notes For Introductory ProbabilityDocument218 paginiLecture Notes For Introductory ProbabilitySohail AfridiÎncă nu există evaluări
- Prob NotesDocument94 paginiProb NotesSathyamoorthy ShanmugasundaramÎncă nu există evaluări
- Notes-Nyquist Plot and Stability CriteriaDocument16 paginiNotes-Nyquist Plot and Stability CriteriaGanesh RadharamÎncă nu există evaluări
- Transient and Steady-State Response AnalysisDocument9 paginiTransient and Steady-State Response Analysisfarouq_razzaz2574Încă nu există evaluări
- QUANTUM TELEPORTATIONDocument23 paginiQUANTUM TELEPORTATIONalkagabaÎncă nu există evaluări
- Upto 62rd BPSC Mechanical Question BankDocument140 paginiUpto 62rd BPSC Mechanical Question BankASHISH KUMAR SINGHÎncă nu există evaluări
- CED-2021 EnergyTransition ReportDocument75 paginiCED-2021 EnergyTransition ReportCityNewsTorontoÎncă nu există evaluări
- BW1114-B2 Bendix Brake CatalogDocument116 paginiBW1114-B2 Bendix Brake Cataloggearhead1100% (1)
- AN-029Wired Locker Access Control ENDocument13 paginiAN-029Wired Locker Access Control ENpetar petrovicÎncă nu există evaluări
- Floor Heating Controls Wiring Instructions for FS and BA Master Weather CompensationDocument12 paginiFloor Heating Controls Wiring Instructions for FS and BA Master Weather Compensationjamppajoo2Încă nu există evaluări
- Adolescent InterviewDocument9 paginiAdolescent Interviewapi-532448305Încă nu există evaluări
- Core-Core Repulsion Integrals: E (A Z ZJJDocument1 paginăCore-Core Repulsion Integrals: E (A Z ZJJRaditya D HmÎncă nu există evaluări
- CS4000 Data SheetDocument6 paginiCS4000 Data SheetJuan Luis EspinosaÎncă nu există evaluări
- Thrust Equation For A Turbofan Double Inlet/Outlet: Joshtheengineer April 8, 2017Document7 paginiThrust Equation For A Turbofan Double Inlet/Outlet: Joshtheengineer April 8, 2017Muhammad RidwanÎncă nu există evaluări
- Chowringhee - (Iisco House) Concept Encapsulation Session: The Oldest FIITJEE Centre in KolkataDocument12 paginiChowringhee - (Iisco House) Concept Encapsulation Session: The Oldest FIITJEE Centre in KolkataHemendra PrasannaÎncă nu există evaluări
- TCXD 46-1984 / Lightning Protection For Buildings - Standard For Design and ConstructionDocument30 paginiTCXD 46-1984 / Lightning Protection For Buildings - Standard For Design and ConstructiontrungjindoÎncă nu există evaluări
- ChuzaChen Hydroelectric Power ProjectDocument13 paginiChuzaChen Hydroelectric Power ProjectkanabaramitÎncă nu există evaluări
- Mouse Molecular Genetics Student Activity 2Document7 paginiMouse Molecular Genetics Student Activity 2Jonathan ZhouÎncă nu există evaluări
- Despiece Des40330 Fagor Sr-23Document45 paginiDespiece Des40330 Fagor Sr-23Nữa Đi EmÎncă nu există evaluări
- Systems ClassDocument53 paginiSystems ClassBhetariya PareshÎncă nu există evaluări
- ICN Question Bank Unit-1, 2 and 3 (Upto GSM Identifier)Document1 paginăICN Question Bank Unit-1, 2 and 3 (Upto GSM Identifier)Snehal PatelÎncă nu există evaluări
- Katie Nelson PDFDocument3 paginiKatie Nelson PDFKatie NÎncă nu există evaluări
- SampleDocument13 paginiSamplemypermatakoe71Încă nu există evaluări
- Career Development Plan: Career Navigation at UBC WebsiteDocument10 paginiCareer Development Plan: Career Navigation at UBC WebsiteKty Margaritta MartinezÎncă nu există evaluări
- eManmanualNo15623hark 599 Brochure - Eca PDFDocument2 paginieManmanualNo15623hark 599 Brochure - Eca PDFKimberly VillanuevaÎncă nu există evaluări
- Beck Thinking and Depression Idiosyncratic Content and Cognitive DistortionsDocument10 paginiBeck Thinking and Depression Idiosyncratic Content and Cognitive DistortionsFrancisco GaravagliaÎncă nu există evaluări
- Anti Climbers FlyerDocument2 paginiAnti Climbers Flyeredark2009Încă nu există evaluări
- 574-Article Text-1139-1-10-20170930Document12 pagini574-Article Text-1139-1-10-20170930Jhufry GhanterÎncă nu există evaluări
- Hyponymy and Hypernymy: Jump To Navigationjump To SearchDocument8 paginiHyponymy and Hypernymy: Jump To Navigationjump To SearchSteven HamÎncă nu există evaluări
- Willie Soon, Peter Frick, and Sallie BaliunasDocument4 paginiWillie Soon, Peter Frick, and Sallie BaliunasMiguel CervantesÎncă nu există evaluări
- Web 2.0, Web 3.0, and User Participation in The WebDocument13 paginiWeb 2.0, Web 3.0, and User Participation in The WebDina Navarro DiestroÎncă nu există evaluări