S-ar putea să vă placă și
- TeoremaRF e SistLinDocument9 paginiTeoremaRF e SistLinGabriel Mendes MedeirosÎncă nu există evaluări
- Norma de Vetores e MatrizesDocument57 paginiNorma de Vetores e MatrizesEster Ferreira DiasÎncă nu există evaluări
- Aulas 5 6 Matrizes ADocument8 paginiAulas 5 6 Matrizes AWilliam GomesÎncă nu există evaluări
- Sistemas Lineares FinalDocument12 paginiSistemas Lineares FinalJersoÎncă nu există evaluări
- Álgebra Linear E Geometria AnalíticaDe la EverandÁlgebra Linear E Geometria AnalíticaÎncă nu există evaluări
- Sistemas LinearesDocument7 paginiSistemas LinearesSamuel SilvaÎncă nu există evaluări
- Exe 2017 GaalDocument35 paginiExe 2017 GaalThalita FreitasÎncă nu există evaluări
- Matematica Manual-2a v0122Document39 paginiMatematica Manual-2a v0122JessicaCorreiaÎncă nu există evaluări
- Matrizes e Sistemas LinearesDocument20 paginiMatrizes e Sistemas LinearesYin Hong TuÎncă nu există evaluări
- Linsis PDFDocument10 paginiLinsis PDFdhiegoÎncă nu există evaluări
- Aula 01 - Álgebra Linear - Sistemas Lineares - 2023 - AtualDocument22 paginiAula 01 - Álgebra Linear - Sistemas Lineares - 2023 - AtualKerly Monroe PontesÎncă nu există evaluări
- Apostila Algebra Linear (Estudar)Document25 paginiApostila Algebra Linear (Estudar)Renan AmorimÎncă nu există evaluări
- Álgebra Linear - 1 Ficha PDFDocument19 paginiÁlgebra Linear - 1 Ficha PDFGonçalo LimaÎncă nu există evaluări
- Vol I 3 MatematicaDocument56 paginiVol I 3 MatematicaplatmaiaÎncă nu există evaluări
- 03 - 02 - 2008 - 04 - 20 - 58sistemas LinearesDocument3 pagini03 - 02 - 2008 - 04 - 20 - 58sistemas LinearesErik OrtolanoÎncă nu există evaluări
- Aula A Aula AlgeLinDocument323 paginiAula A Aula AlgeLinFabrício Trindade FigueredoÎncă nu există evaluări
- ALGAN-LEI-1920 3SistemasEquacoesLineares PrintDocument22 paginiALGAN-LEI-1920 3SistemasEquacoesLineares PrintDJ BluntieÎncă nu există evaluări
- Sistemas Lineares FinalDocument29 paginiSistemas Lineares FinalnicholasjpÎncă nu există evaluări
- Aula 4 - 5Document8 paginiAula 4 - 5Duarte PereiraÎncă nu există evaluări
- 2 Sistema LinearesDocument59 pagini2 Sistema LinearesRaul GabrielÎncă nu există evaluări
- AlgebraDocument94 paginiAlgebramaria joao sargentoÎncă nu există evaluări
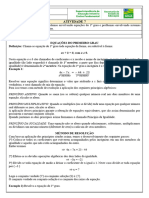
- Atividade 7 - 8º Ano - MAT - Equações Do 1º Grau - Sistemas Com Duas Equações e Duas IncógnitasDocument4 paginiAtividade 7 - 8º Ano - MAT - Equações Do 1º Grau - Sistemas Com Duas Equações e Duas IncógnitasManuella MarianoÎncă nu există evaluări
- Lista SistemasDocument6 paginiLista SistemasΓουλιέλμος ΠαραδεδαÎncă nu există evaluări
- Sistema Lineares - Forma EscadaDocument5 paginiSistema Lineares - Forma Escadaalexandra gagliardiÎncă nu există evaluări
- Aula 05 - Sistemas (16 08 10)Document38 paginiAula 05 - Sistemas (16 08 10)Eduardo FerreiraÎncă nu există evaluări
- Algebra LinearDocument54 paginiAlgebra LinearJamelao Silva da SilvaÎncă nu există evaluări
- Matemática Básica II - Aula 3Document14 paginiMatemática Básica II - Aula 3Marlon Demetrio RodriguesÎncă nu există evaluări
- Matrizes e Sistemas LinearesDocument14 paginiMatrizes e Sistemas LinearesRicardo MarlusÎncă nu există evaluări
- Trabalhando Sistemas Lineares Elm IDocument25 paginiTrabalhando Sistemas Lineares Elm ISCDÎncă nu există evaluări
- Apostila MatrizesDocument20 paginiApostila MatrizesJanaina CarraroÎncă nu există evaluări
- Métodos para Solução de Sistemas LinearesDocument10 paginiMétodos para Solução de Sistemas LinearesRobinson Kazy SomÎncă nu există evaluări
- Unidade 1 - Lista 01 - Algebra Linear - Matrizes e Sistemas LinearesDocument3 paginiUnidade 1 - Lista 01 - Algebra Linear - Matrizes e Sistemas LinearestiagozaoÎncă nu există evaluări
- CN - 2-Notas de Aulas-Sistemas LinearesDocument22 paginiCN - 2-Notas de Aulas-Sistemas LinearesJoão GabrielÎncă nu există evaluări
- Trabalho - FazendaDocument8 paginiTrabalho - FazendaIvonaldo CarlosÎncă nu există evaluări
- LISTA Mat PDFDocument9 paginiLISTA Mat PDFNathani ZampirolliÎncă nu există evaluări
- ALGA Resumo de Matrizes 2017 ULADocument26 paginiALGA Resumo de Matrizes 2017 ULARicardo Jorge Dos santos QuiosaÎncă nu există evaluări
- Sistemas LinearesDocument30 paginiSistemas LinearesMaria DuarteÎncă nu există evaluări
- 5-CN Material 03 SistemaslinearesDocument27 pagini5-CN Material 03 SistemaslinearesRodolfo Oliveira de SouzaÎncă nu există evaluări
- 01.MA - ET. Cálculo NuméricoDocument64 pagini01.MA - ET. Cálculo NuméricoGabriel NatividadeÎncă nu există evaluări
- 2.SlidesSistemas FMDocument64 pagini2.SlidesSistemas FMLuis AraujoÎncă nu există evaluări
- Lista 1 - Matrizes - Sistemas - DeterminantesDocument7 paginiLista 1 - Matrizes - Sistemas - DeterminantesMartha DinizÎncă nu există evaluări
- GAAL - Prova 1Document1 paginăGAAL - Prova 1Amanda BartolomeusÎncă nu există evaluări
- AL - 1 - Sistemas LinearesDocument41 paginiAL - 1 - Sistemas LinearesMonica MartinezÎncă nu există evaluări
- Resumo Calculo NumericoDocument5 paginiResumo Calculo NumericoGabriela SantosÎncă nu există evaluări
- Apostila de Algebra LinearDocument103 paginiApostila de Algebra LinearBóris Ximendes BonfantiÎncă nu există evaluări
- YyyyyyDocument46 paginiYyyyyyGabriel AraujoÎncă nu există evaluări
- Aula Solução de Sistemas Lineares pt1Document79 paginiAula Solução de Sistemas Lineares pt1Chrystian WallanceÎncă nu există evaluări
- Algoritmo OctaveDocument14 paginiAlgoritmo OctavejpaulocregoÎncă nu există evaluări
- Aula4 - Sistemas LinearesDocument17 paginiAula4 - Sistemas LinearesestoicaaescolaÎncă nu există evaluări
- Equações Diferenciais Lineares de Ordem SuperiorDocument6 paginiEquações Diferenciais Lineares de Ordem SuperiorFranckSiilvaÎncă nu există evaluări
- Álgebra Linear2Document44 paginiÁlgebra Linear2EE Profa. Lenina Ferraro da Silva - CDE 6Încă nu există evaluări
- 1-Matrizes - Livro de Algebra Linear IDocument23 pagini1-Matrizes - Livro de Algebra Linear IFábio ArcanjoÎncă nu există evaluări
- Lista Dos Atalhos Dos Principais Comandos Do Autocad PDFDocument6 paginiLista Dos Atalhos Dos Principais Comandos Do Autocad PDFsidÎncă nu există evaluări
- Caderno Resolução Comentada 5 Semana 5 Ano EF PDFDocument9 paginiCaderno Resolução Comentada 5 Semana 5 Ano EF PDFsidÎncă nu există evaluări
- Ativcompl Mat5 05num09 PDFDocument1 paginăAtivcompl Mat5 05num09 PDFsidÎncă nu există evaluări
- Comandos AutoCAD (Português e Inglês)Document7 paginiComandos AutoCAD (Português e Inglês)Daniel BotelhoÎncă nu există evaluări
- Ativcompl Mat5 05num09 PDFDocument1 paginăAtivcompl Mat5 05num09 PDFsidÎncă nu există evaluări
- Dimensionamento Do Condutores ProcobreDocument14 paginiDimensionamento Do Condutores ProcobreCésar Ullmann Capinos Ariani AntoniniÎncă nu există evaluări
- FórumDocument2 paginiFórumsidÎncă nu există evaluări
- Lista Dos Atalhos Dos Principais Comandos Do Autocad PDFDocument6 paginiLista Dos Atalhos Dos Principais Comandos Do Autocad PDFsidÎncă nu există evaluări
- Fórum Gerenciamento de Riscos 2Document1 paginăFórum Gerenciamento de Riscos 2sidÎncă nu există evaluări
- Forum Hig TrabDocument4 paginiForum Hig TrabsidÎncă nu există evaluări
- O Marceneiro e As FerramentasDocument13 paginiO Marceneiro e As FerramentasFrançoise AmorimÎncă nu există evaluări
- Exercícios de Fixação de Gerenciamento de RiscosDocument23 paginiExercícios de Fixação de Gerenciamento de RiscossidÎncă nu există evaluări
- CMB 2017 Sessao Plenaria II Paulo Ricardo Behrens Da Franca PDFDocument19 paginiCMB 2017 Sessao Plenaria II Paulo Ricardo Behrens Da Franca PDFsidÎncă nu există evaluări
- Dimensionamento Vigas Lajes Bezerra MonografiaDocument99 paginiDimensionamento Vigas Lajes Bezerra MonografiaCléudes RodriguesÎncă nu există evaluări
- Concreto PDFDocument31 paginiConcreto PDFcamilaÎncă nu există evaluări
- PF PF - EC 217104 PF EC.028 Estruturas Concreto 2017 1Document3 paginiPF PF - EC 217104 PF EC.028 Estruturas Concreto 2017 1Vinícius MourãoÎncă nu există evaluări
- EscadasDocument15 paginiEscadasluisÎncă nu există evaluări
- Tabela LajesDocument27 paginiTabela LajesGeorge WallaceÎncă nu există evaluări
- Apostila Rapida de Calculo AlvenariaDocument57 paginiApostila Rapida de Calculo AlvenariaRoger CarelliÎncă nu există evaluări
- Apostila TigreCADDocument26 paginiApostila TigreCADRodrigoÎncă nu există evaluări
- PDF 575Document5 paginiPDF 575sidÎncă nu există evaluări
- Apostila Eberick BásicoDocument56 paginiApostila Eberick BásicoEdson Augusto100% (1)
- Método Simplificado para Cálculo de LajesDocument11 paginiMétodo Simplificado para Cálculo de LajesRodrigo DuarteÎncă nu există evaluări
- Document5d8378a477809 PDFDocument77 paginiDocument5d8378a477809 PDFsidÎncă nu există evaluări
- Analogia MohrDocument7 paginiAnalogia MohrAlexander BalkowskiÎncă nu există evaluări
- F Imp PiscDocument20 paginiF Imp PiscsidÎncă nu există evaluări
- Desenhando Moveis - o Livro 1Document12 paginiDesenhando Moveis - o Livro 1Paulo CardosoÎncă nu există evaluări
- Inst Hid San ReservDocument25 paginiInst Hid San ReservsidÎncă nu există evaluări
- Apostila Irrigação 2012Document77 paginiApostila Irrigação 2012anon_140267718Încă nu există evaluări
- Resolucaotjoe 1 2017 AnexosconsolidadosDocument283 paginiResolucaotjoe 1 2017 AnexosconsolidadosPaholaÎncă nu există evaluări
- Lista de Exercícios FísicaDocument7 paginiLista de Exercícios FísicahudsmarÎncă nu există evaluări
- Quest Biolcel Prova 1Document6 paginiQuest Biolcel Prova 1oidualc20110% (1)
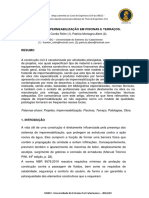
- Artigo - Utilizar No Trabalho de FundaçõesDocument7 paginiArtigo - Utilizar No Trabalho de FundaçõesBruno PerozaÎncă nu există evaluări
- Despesas CaiãoDocument6 paginiDespesas CaiãoCaio VitalÎncă nu există evaluări
- Formação Serviço AlentejoDocument125 paginiFormação Serviço AlentejoCrisÎncă nu există evaluări
- Manual KGD Válvulas Guilhotina de Lama Clarkson BP PT BR 5193474Document16 paginiManual KGD Válvulas Guilhotina de Lama Clarkson BP PT BR 5193474JrbritoÎncă nu există evaluări
- Homônios Veetais GAS ETILENODocument36 paginiHomônios Veetais GAS ETILENOCleber AssisÎncă nu există evaluări
- Curriculo de Ensino BasicoDocument103 paginiCurriculo de Ensino BasicoDelio Patricio Tura DanielÎncă nu există evaluări
- Chainsaw HeartDocument11 paginiChainsaw Heartcardosooliveiralucas982Încă nu există evaluări
- Peça de Arquitetura - IniciaçãoDocument1 paginăPeça de Arquitetura - Iniciaçãoleonardo barcelosÎncă nu există evaluări
- Texto Empuxo e Principio de ArquimedesDocument5 paginiTexto Empuxo e Principio de ArquimedesAlberto MaiaÎncă nu există evaluări
- Mapa de Risco Banco CentralDocument3 paginiMapa de Risco Banco Centralagislayne pargaÎncă nu există evaluări
- Modelos de LaudosDocument6 paginiModelos de Laudoswillams AlvesÎncă nu există evaluări
- DestilacaoDocument6 paginiDestilacaoMartinõ MarcellÎncă nu există evaluări
- Brinquedos PedagogicosDocument40 paginiBrinquedos PedagogicosCleonice OliveiraÎncă nu există evaluări
- Modelo de Petição de Ação de Indenização Por Danos MateriaisDocument5 paginiModelo de Petição de Ação de Indenização Por Danos Materiaisgraciele AlkmimÎncă nu există evaluări
- 12.07 - PortuguesDocument9 pagini12.07 - PortuguesMarcos HenriqueÎncă nu există evaluări
- Bambozzi Talha Eletrica Manual de Instrucao 439850Document34 paginiBambozzi Talha Eletrica Manual de Instrucao 439850MárcioHenriqueÎncă nu există evaluări
- UNEB 2019 Caderno 2 Medicina Modelo 1Document17 paginiUNEB 2019 Caderno 2 Medicina Modelo 1Clara AmorimÎncă nu există evaluări
- Ebook Takae Sasaki V002 PDFDocument27 paginiEbook Takae Sasaki V002 PDFRenato BaptistaÎncă nu există evaluări
- Dilatação Linear de Um Sólido MetálicoDocument9 paginiDilatação Linear de Um Sólido MetálicoCarlos HenriqueÎncă nu există evaluări
- AP1 - AII - 2019-2 - GabaritoDocument3 paginiAP1 - AII - 2019-2 - GabaritoRoberto Jesus LinaresÎncă nu există evaluări
- BIKEFIT v6.0Document1 paginăBIKEFIT v6.0airtonpaulo2Încă nu există evaluări
- #6 Construção de MASMORRAS 1 PGDocument1 pagină#6 Construção de MASMORRAS 1 PGLIE glcÎncă nu există evaluări
- AzevedoDocument14 paginiAzevedoDinheirama.comÎncă nu există evaluări
- MÁQUINA: D560 / D760: Corrente Tensão Corrente Qm1 Fator Ajuste Ajuste Qm1 Potência M1 Corrente M1 Potência Cabo EntradaDocument162 paginiMÁQUINA: D560 / D760: Corrente Tensão Corrente Qm1 Fator Ajuste Ajuste Qm1 Potência M1 Corrente M1 Potência Cabo EntradaRoger RochaÎncă nu există evaluări
- Relatório de EstagioDocument14 paginiRelatório de EstagioCastro Naldo0% (1)
- giroscópio2012editadoPDF (Roteiro) III PDFDocument8 paginigiroscópio2012editadoPDF (Roteiro) III PDFxotunredmailtopÎncă nu există evaluări