S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Kakuro Cheat SheetDocument1 paginăKakuro Cheat Sheetmohammed100% (1)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Rogue Trader - Ship Designer SpreadsheetDocument103 paginiRogue Trader - Ship Designer SpreadsheetMorgan MannÎncă nu există evaluări
- Advanced CQB GuideDocument16 paginiAdvanced CQB GuideAnonymous xjBXSbDVzR100% (1)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Banking On Baghdad: Inside Iraq's 7,000-Year History of War, Profit, and ConflictDocument498 paginiBanking On Baghdad: Inside Iraq's 7,000-Year History of War, Profit, and Conflictnouiwi100% (1)
- Askfageln - Best of Fenix - Volume 2Document115 paginiAskfageln - Best of Fenix - Volume 2Gary M. Ciaramella100% (3)
- Stages of Second Language AcquisitionDocument2 paginiStages of Second Language AcquisitionmohammedÎncă nu există evaluări
- Civil 222 Mid500Document20 paginiCivil 222 Mid500mohammedÎncă nu există evaluări
- Stages of English SpeakingDocument8 paginiStages of English SpeakingmohammedÎncă nu există evaluări
- A 3 TemplateDocument16 paginiA 3 TemplatemohammedÎncă nu există evaluări
- Precise Orbit Determination: Adrian Jäggi and Daniel ArnoldDocument47 paginiPrecise Orbit Determination: Adrian Jäggi and Daniel ArnoldmohammedÎncă nu există evaluări
- POSSNSDocument2 paginiPOSSNSmohammedÎncă nu există evaluări
- A Product By: Magicgnss PPP ReportDocument9 paginiA Product By: Magicgnss PPP ReportmohammedÎncă nu există evaluări
- Personal Information Collection Statement (PICS)Document2 paginiPersonal Information Collection Statement (PICS)mohammedÎncă nu există evaluări
- The Multi-GNSS Experiment (MGEX) of The International GNSS Service (IGS) - Achievements, Prospects and ChallengesDocument27 paginiThe Multi-GNSS Experiment (MGEX) of The International GNSS Service (IGS) - Achievements, Prospects and ChallengesmohammedÎncă nu există evaluări
- Innovation - Navigation From LEO - GPS World PDFDocument13 paginiInnovation - Navigation From LEO - GPS World PDFmohammedÎncă nu există evaluări
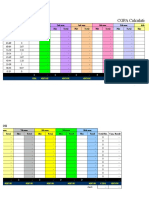
- CGPA Calculation: GPA #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0!Document2 paginiCGPA Calculation: GPA #DIV/0! #DIV/0! #DIV/0! #DIV/0! #DIV/0!mohammedÎncă nu există evaluări
- Innovation - Navigation From LEO - GPS World PDFDocument13 paginiInnovation - Navigation From LEO - GPS World PDFmohammedÎncă nu există evaluări
- أبدأ بالأهم ولو كان صعباًDocument1 paginăأبدأ بالأهم ولو كان صعباًmohammedÎncă nu există evaluări
- Maximum Achievement Brian Tracy 1995 BookDocument2 paginiMaximum Achievement Brian Tracy 1995 BookmohammedÎncă nu există evaluări
- ASE-389P4 Spr15Document2 paginiASE-389P4 Spr15mohammedÎncă nu există evaluări
- If If Then Future Tense: Research Plan (Sample)Document1 paginăIf If Then Future Tense: Research Plan (Sample)mohammedÎncă nu există evaluări
- Book Review: How Learning Works: 7 Research-Based Principles For Smart Teaching by Susan A. Ambrose, Michael W. Bridges, Michele DiPietro, Marsha C. Lovett, Marie K. Norman, and Richard E. MayerDocument3 paginiBook Review: How Learning Works: 7 Research-Based Principles For Smart Teaching by Susan A. Ambrose, Michael W. Bridges, Michele DiPietro, Marsha C. Lovett, Marie K. Norman, and Richard E. Mayermohammed100% (1)
- Modern History - U01 - CH02 - Advent of EuropeansDocument34 paginiModern History - U01 - CH02 - Advent of EuropeansNandÎncă nu există evaluări
- The French and Indian War 1Document2 paginiThe French and Indian War 1api-265371560Încă nu există evaluări
- BayaniDocument19 paginiBayaniGrace ArmenioÎncă nu există evaluări
- The Future of Arms Control and International Security: Adam Daniel RotfeldDocument12 paginiThe Future of Arms Control and International Security: Adam Daniel RotfeldEleni AntoniouÎncă nu există evaluări
- Eob CluebookDocument41 paginiEob CluebookDennis MorinÎncă nu există evaluări
- 1000 Pts - 1942 Stalingrad, Death On The Volga: Name # Group Quality Morale Damage Move TPT Cap Option Summary CostDocument3 pagini1000 Pts - 1942 Stalingrad, Death On The Volga: Name # Group Quality Morale Damage Move TPT Cap Option Summary CostElessar259Încă nu există evaluări
- T8 B15 FAA Subpoena Compendium FDR - ANE ZBN Tab - Doc Indexes 696Document14 paginiT8 B15 FAA Subpoena Compendium FDR - ANE ZBN Tab - Doc Indexes 6969/11 Document ArchiveÎncă nu există evaluări
- Behast Ke KunjiaDocument251 paginiBehast Ke KunjiaFarooque barkati (sufi)Încă nu există evaluări
- Filipino's Life During World War IIDocument3 paginiFilipino's Life During World War IIjayson pintorÎncă nu există evaluări
- Ihl Reviewer PDFDocument8 paginiIhl Reviewer PDFAnthony AlonzoÎncă nu există evaluări
- IC History Genghis Part 2 PDFDocument21 paginiIC History Genghis Part 2 PDFGia Narayan100% (1)
- LABOR LAW Book IV Case DigestDocument12 paginiLABOR LAW Book IV Case DigestCamille FloresÎncă nu există evaluări
- Notams 1921-39 1945-49Document53 paginiNotams 1921-39 1945-49Bobby ChippingÎncă nu există evaluări
- Army Aviation Digest - Feb 1965Document52 paginiArmy Aviation Digest - Feb 1965Aviation/Space History LibraryÎncă nu există evaluări
- Rwanda Peacekeepers Meritorious Unit CitationDocument16 paginiRwanda Peacekeepers Meritorious Unit CitationMichael SmithÎncă nu există evaluări
- 6th Tamil 1Document18 pagini6th Tamil 1BalajananiÎncă nu există evaluări
- Peserta Lomba Poster NasionalDocument2 paginiPeserta Lomba Poster NasionalAbdillah ZidanÎncă nu există evaluări
- Revision Guide Paper 1B: Conflict and Tension 1894-1918: @historykesDocument25 paginiRevision Guide Paper 1B: Conflict and Tension 1894-1918: @historykesVicky KÎncă nu există evaluări
- Manila's History Begins Around 65,000 BC The Time The: SeludongDocument1 paginăManila's History Begins Around 65,000 BC The Time The: Seludongzurc ughieÎncă nu există evaluări
- Nct-Avery DoumaDocument4 paginiNct-Avery DoumaAvery DoumaÎncă nu există evaluări
- Upkk 2019 - Ulum SyariyahDocument19 paginiUpkk 2019 - Ulum SyariyahallakaraÎncă nu există evaluări
- The MarathasDocument14 paginiThe Marathasprotonrk1Încă nu există evaluări
- Ernst Jinger PDFDocument2 paginiErnst Jinger PDFDerek0% (1)
- Lea 1 PDFDocument41 paginiLea 1 PDFAries DialinoÎncă nu există evaluări
- BL-GE-6300-LEC-1933T LIFE AND WORKS of Jose RizalDocument27 paginiBL-GE-6300-LEC-1933T LIFE AND WORKS of Jose RizalApple CamaliganÎncă nu există evaluări
- Dissertation First World WarDocument6 paginiDissertation First World WarCanSomeoneWriteMyPaperCanada100% (1)