S-ar putea să vă placă și
- PTS Corte de TuberíasDocument4 paginiPTS Corte de TuberíasJuan Pablo Araya López100% (1)
- Tema 1 AppccDocument14 paginiTema 1 AppccJesusito Manuel RojasÎncă nu există evaluări
- Resultados Destilacion BathDocument10 paginiResultados Destilacion BathJesusito Manuel RojasÎncă nu există evaluări
- Glosario de TérminosDocument8 paginiGlosario de TérminosJesusito Manuel RojasÎncă nu există evaluări
- Introduccion Secador NeumaticoDocument1 paginăIntroduccion Secador NeumaticoJesusito Manuel RojasÎncă nu există evaluări
- Discusion FiltracionDocument3 paginiDiscusion FiltracionJesusito Manuel RojasÎncă nu există evaluări
- Tipos de Pozos REVISAR ESTE PDFDocument7 paginiTipos de Pozos REVISAR ESTE PDFJesusito Manuel RojasÎncă nu există evaluări
- Primeros Pasos en CES EduPackDocument18 paginiPrimeros Pasos en CES EduPackJesusito Manuel Rojas0% (1)
- Programacion de ObraDocument2 paginiProgramacion de ObraCOINCO SASÎncă nu există evaluări
- Informe Taller Logica LadderDocument3 paginiInforme Taller Logica LadderYennzy BarreraÎncă nu există evaluări
- Enfardadora SemiautomaticaDocument30 paginiEnfardadora SemiautomaticaAlex PérezÎncă nu există evaluări
- Vibra BotDocument2 paginiVibra BotclonqfbÎncă nu există evaluări
- INFORME TECNICO RWL 006-Tablero Pozo-SetiembreDocument5 paginiINFORME TECNICO RWL 006-Tablero Pozo-Setiembreoliver diazÎncă nu există evaluări
- Pergola Curva: Usos de Pompones Decorativos en La PergolaDocument1 paginăPergola Curva: Usos de Pompones Decorativos en La PergolaGrecia Reinoso AguirreÎncă nu există evaluări
- Planilla Uso Diario ServitacDocument2 paginiPlanilla Uso Diario ServitacDorian DiagoÎncă nu există evaluări
- Operacional Oral DgacDocument4 paginiOperacional Oral DgacDiego CórdovaÎncă nu există evaluări
- Puente Colgante Peatonal - 2Document3 paginiPuente Colgante Peatonal - 2Royce MarcÎncă nu există evaluări
- Formato de Valorización Con TarrajeoDocument1 paginăFormato de Valorización Con TarrajeoLucessitha Tenazoa UriarteÎncă nu există evaluări
- Practica 12Document3 paginiPractica 12Estados SadÎncă nu există evaluări
- 05Document3 pagini05cristhia Romero BerchÎncă nu există evaluări
- Ilide - Info Muros de Boca PRDocument10 paginiIlide - Info Muros de Boca PRRodrigo NeicúnÎncă nu există evaluări
- Circuitos Serie y ParaleloDocument3 paginiCircuitos Serie y ParaleloDaniel PabonÎncă nu există evaluări
- Formato Manual TécnicoDocument11 paginiFormato Manual TécnicoOrlando GasparÎncă nu există evaluări
- Trabajo en Altura 4 10 2023Document6 paginiTrabajo en Altura 4 10 2023jorgeÎncă nu există evaluări
- Reporte de Turno 2Document2 paginiReporte de Turno 2danilocastillo05Încă nu există evaluări
- A10 A30 A50 A60 Presentación2Document1 paginăA10 A30 A50 A60 Presentación2ignacio5173Încă nu există evaluări
- Reemplazo de Inserto de MixerDocument6 paginiReemplazo de Inserto de MixerAldair GarciaÎncă nu există evaluări
- Examen Final de Caminos T1 20221-IiDocument3 paginiExamen Final de Caminos T1 20221-IiAugusto BriceñoÎncă nu există evaluări
- Vigas PeraltadasDocument7 paginiVigas PeraltadasIngrid CamachoÎncă nu există evaluări
- Pedido 1020017259Document2 paginiPedido 1020017259LozanoÎncă nu există evaluări
- Consulta InductoresDocument3 paginiConsulta InductoresNATHALIA VANESA BELALCAZAR CAICEDOÎncă nu există evaluări
- Permiso de Trabajo Espacio Confinado.Document2 paginiPermiso de Trabajo Espacio Confinado.sandra fuentesÎncă nu există evaluări
- Hoja de Vida Alexis N PDFDocument1 paginăHoja de Vida Alexis N PDFAlexis Nuñez VegasÎncă nu există evaluări
- Circuito Alarma IncendioDocument14 paginiCircuito Alarma IncendioKENNET FRANCISCO CETINA GUERRAÎncă nu există evaluări
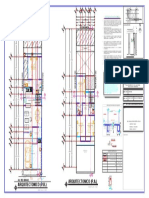
- A-01 Arquitectonicos Sra Marg - VegasDocument1 paginăA-01 Arquitectonicos Sra Marg - VegasJOSE ALONSO MENDOZA DELGADOÎncă nu există evaluări
- Reporte Diario 11-08-2023 Turno DiaDocument84 paginiReporte Diario 11-08-2023 Turno DiaBrayan PonceÎncă nu există evaluări
- Cotizacion Bodega de Fertilizante DefinitivaDocument5 paginiCotizacion Bodega de Fertilizante DefinitivaDaniela CarbonóÎncă nu există evaluări