Documente Academic
Documente Profesional
Documente Cultură
Dispositivo Verano Potencia
Încărcat de
Aalfredo Lezama RamirezDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Dispositivo Verano Potencia
Încărcat de
Aalfredo Lezama RamirezDrepturi de autor:
Formate disponibile
RVP-AI/2018 1
Dispositivo para usar motores de inducción
trifásicos en instalaciones monofásicas
Alfredo Lezama, ∗ , Jorge Resa, † , Domingo Cortés‡ , Juan Francisco Márquez‡ .
Instituto Politécnico Nacional∗†‡§
Email: ∗ alezama 1234@hotmail.com, † jorgeresa@yahoo.com, ‡ domingo.cortes@gmail.com,
§ jfcomr23@yahoo.com.mx,
Resumen—Los motores de inducción trifásicos (MI-T) mejores semiconductores de potencia; el mejoramiento
son robustos, eficientes, confiables, baratos y requieren me- de dispositivos analógicos para la medición de variables
nos mantenimiento que otros motores. Por estas ventajas es eléctricas y el procesamientos de señales analógicas y
el motor más usado en la industria. Hasta hace poco estas finalmente, la impresionante mejora de los microcontro-
ventajas no se podı́an aprovechar en la microindustria
ladores. Todo ello con un costo cada vez menor ([5],
o en aplicaciones domésticas, ya que en estos casos, la
alimentación es monofásica de 127V y no trifásica como
[2]).
requiere el motor. En este artı́culo se presenta el desarrollo Como consecuencia de estos cambios tecnológicos,
de un dispositivo robusto y confiable que a partir de una el hardware para controlar el de MI-T ya no tiene un
toma monofásica de 127V, genera un voltaje trifásico de costo tan elevado y ahora es viable la construcción de
amplitud y frecuencia variables, apto para alimentar y un dispositivo que a partir de un voltaje monofásico
controlar un MI-T. de 120V, genere un voltaje trifásico de amplitud y
frecuencia variables.
I. I NTRODUCCI ÓN En este artı́culo se reporta el desarrollo de un dis-
positivo de tales caracterı́sticas. Dicho dispositivo hace
Debido al creciente uso de la energı́a eléctrica, el que las mismas ventajas por las que se usa el MI-T
uso de motores eléctricos en aplicaciones industriales, en la industria sean aprovechadas en la microindustria
comerciales, domesticas y de transporte es cada vez y en las aplicaciones domésticas. Más aún, el costo de
mayor. Dentro de los motores eléctricos el motor de dicho dispositivo se recuperarı́a por los ahorros que se
inducción trifásico (MI-T) destaca por sencillez en su tendrı́an en la energı́a y el mantenimiento. El desarrollo
construcción, su bajo costo, su robustez, su eficiencia aquı́ descrito incluye medidas de seguridad para hacer al
y el poco mantenimiento que requiere. Debido a estas dispositivo robusto y confiable.
ventajas es el motor más usado en la industria ([3]). Sin
El resto del artı́culo está organizado como sigue. En la
embargo, su uso en aplicaciones domésticas, ha estado
sección II se describe el desarrollo general. En la sección
limitado por dos factores. Uno es el hecho de que los
III se presentan algunos detalles de la implementación y
MI-T son más difı́ciles de controlar en comparación con
pruebas de funcionamiento. Finalmente se dan algunas
otros motores. El otro es que el suministro eléctrico en
conclusiones y trabajo a futuro.
México y economı́as similares proporciona un voltaje
monofásico de 120V, mientras que el MI-T requiere un
voltaje trifásico de amplitud y frecuencia variables con
220V nominales. II. D ISE ÑO GENERAL E IMPLEMENTACI ÓN
Por otra parte, en nuestro paı́s y en muchos otros con
similar economı́a, existen microindustrias cuyas instala- El esquema general del dispositivo que genera un
ciones eléctricas son monofásicas. Esta es la causa de voltaje trifásico de amplitud y frecuencia variables a
que en este tipo de industria no se pueda emplear el partir de una toma monofásica se muestra en la figura
MI-T para las necesidades de control de movimiento, a 1. Éste consiste en dos etapas. La primera produce un
pesar de las ventajas que eso podrı́a significar. voltaje de corriente directa variable. La segunda toma
En las últimas décadas el avance en diversas áreas ese voltaje y genera un suministro trifásico de amplitud
de la electrónica ha incrementado de forma notable y frecuencia variables.
la posibilidad de usar motores en nuevas aplicaciones. En las secciones siguientes se detalla como se di-
Entre estos avances se encuentran: el desarrollo de señaron, construyeron y evaluaron estas etapas.
RVP-AI/2018 2
C7
1u Relay_Act
D1
D4
R6 UF4001
10Ohm Q3
UF4001
2N7000G
+12V
RL3
RLY-SPNO
RT2
-tc
FU3
BR2
20A
3.0R
1
C8 C9
VR2
VBus
NAME=CMT-8121 2.2nF GBPC5006
1uF
VARISTOR
*PINOUT CHOKE-DC
Tierra_Fisica
J4:A FU2
2 FU1
2
1 20A J3
20A
SIL-100-02
BR1 3/6
C2 2/5
1
1
1/4
1
2.2nF Tierra_Fisica
R3 C12 C10 R2
J5:A VR1
Figura 1. Esquema propuesto para obtener un voltaje trifásico a partir 2 VARISTOR
C1
1uF
Tierra_Fisica GBPC5006 330k
680u 680u 330k
TBLOCK-I3
2
1
2
RT1 C3
de una alimentación monofásica SIL-100-02 2.2nF
-tc
Tierra_Fisica
RL1
1
3.0R R5
RLY-SPNO R4 C11 C6
330k 680u 680u 330k
2
+12V
Q1
D3
II-A. Fuente de CD de voltaje variable
2N7000G
R1
10Ohm D2
UF4001
UF4001
Esta etapa consiste a su vez en dos partes. La primera C13 Relay_Act
1u
es un rectificador con limitación de corriente de encen-
dido, descarga automática de capacitores después del Figura 2. Esquema del rectificador (parte 1)
apagado y protecciones de sobre corriente a la entrada
y a la salida. La segunda parte consiste en un reductor
de voltaje con hardware para implementar un lazo de Al apagar el rectificador, los capacitores pasan de
control y una fuente adicional para el disparo de los carga máxima a descargarse lentamente. El tiempo de
transistores. A continuación se explica cada una de estas descarga puede ser de varias horas y podrı́a ocasionar
partes. una descarga eléctrica por accidente. Para evitar esto, se
II-A1. Rectificador trifásico/monofásico: Esta parte le agregó una resistencia de potencia para descargar los
consiste en un rectificador estándar ([1], [7], [8]) al que capacitores.
se le agregaron protecciones y algunos circuitos adicio- Esta resistencia sólo es necesaria cuando el rectifica-
nales para mejorar su confiabilidad. Los más importantes dor se desconecta o se apaga. Al apagar el rectificador
son: la resistencia se conecta a los capacitores mediante un
Circuito limitador de corriente y relevador circuito que acciona un relevador normalmente cerrado
Descarga automática de capacitores y la descarga se realiza en segundos. La resistencia de
Estos se describen a continuación. potencia se conecta a los capacitores una vez que el
Circuito Limitador de Corriente y relevador circuito se des-energiza, disipando la energı́a almacenada
Un rectificador requiere capacitores grandes para re- en los capacitores.
ducir el rizo del voltaje de salida. En el encendido, El valor de la resistencia de descarga y su potencia se
estos capacitores se comportan como un corto circuito calcula a partir de la máxima energı́a almacenada en los
que, aunque momentáneo, es suficiente para accionar las capacitores dada por
protecciones contra sobre corriente de la toma doméstica 1
E = CV 2 (1)
y del propio rectificador. Por ello, se le agregó un circuito 2
limitador de corriente inicial. De aquı́ que la energı́a aproximada almacenada máxima
Para este fin, se utilizó un termistor. Este semiconduc- es de 100 Joules. Si se tiene un tiempo estimado de
tor presenta una resistencia proporcional a la corriente descarga de 10Seg. Una resistencia de 1000Ω @ 100W
que circula por el. Este efecto le permite funcionar como descarga los capacitores sin que se disipe un calor
un limitador de corriente. Sin embargo, debido a que este excesivo.
semiconductor no puede estar conectado todo el tiempo, II-A2. Reductor de voltaje: Una vez obtenido un
se agregó un circuito que desconecta este limitador voltaje de CD no regulado, la segunda parte de la fuente
cuando el voltaje de los capacitores es mayor a 30V. es un convertidor cd/cd para regular y variar el voltaje.
El circuito que desconecta al limitador, esta compuesto Se utilizó una topologı́a de convertidor reductor estándar
principalmente por un comparador y un relevador ([4]). ([1], [7], [8]) al que se le agregó el hardware necesario
Al encenderse el dispositivo, la corriente circula por el para implementar cualquier control en lazo cerrado.
limitador, cuando el voltaje de los capacitores supera Generalmente, el cd/cd reductor utiliza un diodo y un
30V el comparador enciende el relevador que a partir MOSFET. Para obtener un mejor rendimiento se cambió
de ese instante deja pasar la corriente protegiendo ası́ al por un par de IGBT’s conectados en tótem. Se utilizaron
limitador. tres capacitores de polipropileno de 4.7uF @500V en
Descarga automática de capacitores paralelo para formar una capacitancia total de 14.1uF.
RVP-AI/2018 3
VBus
C17
+15V CurrAdc
0.1u
R50 +5V
+15V 330k
+12V RV1
+15V 5K
U3
7812
J1:A:A
R68 +600V 2/4
R66
2
10k 1/3
1 3
VI VO 330k U8 FU1
2
1
GND
VCC
VIOUT
RV1 SIL-100-02
GND
+600V
U2:A ACS755XCB-050
C49 TP9 20A
C47 C4
4
C5
Vout
Q1 TEST_POINT
IP+
IP-
J2 0.1uF 22U 0.1uF
2
22U 3
IRFP4232PBF
TBLOCK-I2 R51 1
Relay_Act A-H
TP
5
2
C50
10k L1
R5
1
0.1uF 10K
8
LM358 56k 1H
R70
VBus
C51 C1 J3:A:A
10k 0.1uF Q2 C2 C3
1nF 1/3
IRFP4232PBF 1nF 1nF 2/4
A-L
RL2
SIL-100-02
RLY-SPCO
R53 R9
1R
56k
+15V
+12V
Q2
D13 R52
2N7000G
+3V
10Ohm D12 +3V
UF4001
R55
10k U2:B
UF4001
J4
4
+3V
5 1
R57 SAH
2 R12
7
Relay_Res SAL
3
R13
Relay_Res 10k
C52 R54 6 10 VinAdc
4 10k
10k CurrAdc
VoutAdc
5 RV4
6
J5 Vup J6
8
Vdown
1u LM358 R71 2
CONN-H6 2
10 VoutRef 1 C11 1 C12
0.1u 0.1u
TBLOCK-I2 TBLOCK-I2
5K C8
0.1u
Figura 3. Esquema del rectificador (parte 2) Figura 5. Reductor de Voltaje (parte 2)
D10
II-B. Inversor trifásico
Vout
R25 +600V
10
UF4001
C4
4u7
2
1
U2
VI+ VO+
DC-DCs
VI- Com
4
C5
56u C22
0.1u
R1
10k
R8
10k La segunda etapa del dispositivo es un inversor trifási-
3
AM1S-1212S
+12V
IC1
R2
120
R6
10k
R10
10k
co. El inversor utilizado es una mejora del inversor
A-H
D1 R18
SAH
SAL
VCC
HIN
LIN
HO
VB
VS
UF4001
10
R7
10k
R11
10k
trifásico estándar ([1], [7], [8]) que cuenta con 6 transis-
Rdt DT COM R3
VSS
IRS21834
LO
120
D2 R4
A A-L
RV2
VinAdc
RV3
tores en 3 totems. Cada tótem es una fase de salida del
10 VoutAdc
UF4001
+600V
5K
C6
0.1u 5K
C7
0.1u
inversor al motor. Los transistores usados son MOSFETs
+12V
de potencia los cuales pueden soportar 500V entre sus
J2
1
2
TBLOCK-I2 U3
+5V
terminales y puede circular una corriente continua de
+12V U1
78L05
+3V +5V U4
7805 +12V
VIN
PWM-H
PWM-L
ADC-CURR
J3-16
J1-5
J1-14
SAH
SAL
CurrAdc
hasta 15A. Estos transistores son activados por tres
J1-11
ADC-VIN VinAdc
3
VI VO
1 3
VO VI
1 ADC-VOUT
ADC-VREF
J1-1
J1-9
VoutAdc
VoutRef circuitos integrados IRS21834, que como se ha men-
GND
GND
J4-2
C10 C9 C16 BUTTON-UP
J1-4
Vup
BUTTON-DOWN Vdown
C14 J1-3
cionado tienen inserción de tiempo muerto que evita
4u7
0.1u
2
GND
2
0.1u 4u7 J3-12
FRDM-64
corto circuitos entre los totems. El valor del tiempo
muerto se fija por una resistencia variable, ası́, el tiempo
Figura 4. Reductor de Voltaje (parte 1) puede variarse desde unos cientos nanosegundos hasta 5
microsegundos.
Las señales de control de los disparos pasan por
El inductor fue hecho a partir de un núcleo de ferrita y una etapa de aislamiento eléctrico que separa la etapa
se uso un cable de cobre ferromagnético de calibre 14 de potencia de la de control. Esta separación tiene 2
(con poco más de 2 mm2 de área transversal), para poder ventajas. La primera es que da más seguridad ante un
soportar 10A continuos. La inductancia fue de 286uH a corto circuito o descarga y la segunda es que ayuda a
1khz. disminuir el ruido electromagnético inducido entre las
Se utilizaron IGBTs (FGH40N60), que soportan (con dos etapas.
la disipación adecuada), hasta 40A continuos y un voltaje El inversor también cuenta con una protección con-
de hasta 600V. El circuito de disparo está hecho con base tra sobre-corriente en las terminales de alimentación.
en el circuito integrado IRS21834. Éste tiene inserción Esta protección esta hecho a partir de un sensor de
de tiempo muerto por hardware evitando ası́ que los corriente de efecto hall que puede soportar hasta 50A
dos transistores se activen simultáneamente causando un de corriente. La salida del sensor pasa por un filtro
corto circuito. pasa bajas de segundo orden en configuración “Sallen
El circuito reductor de voltaje necesita una fuente Key” para evitar que el circuito se active con señales de
adicional de voltaje de 12V que suministre energı́a al ruido. La configuración “Sallen Key” sólo requiere una
circuito de disparo de los transistores, ası́ como a los alimentación positiva de voltaje en lugar de tener que
circuitos de medición de voltaje y corriente y a la tarjeta usar una alimentación bipolar. Después del filtro pasa
de control. bajas la señal se compara con un valor de consigna que
El diseño completo del reductor de voltaje se muestra representa el valor de corriente máximo que puede pasar
en las figuras4 y 5. por la alimentación del inversor. Este valor de consigna
RVP-AI/2018 4
+5V TP1 TP2 TP3
+5Vt TEST_POINT TEST_POINT
TEST_POINT
U6
TP
TP
TP
J9 1 16
TP12 TP13 TP14
CONN-SIL4 VDD1 VDD2 TEST_POINT
TEST_POINT
TEST_POINT
J5 2 15
1
1
GND1 GND2
A 1/4
TP
3 14
TP
TP
2/5 SHA VIA VOA SAH
B
3/6 4 13 +12V
C SHB VIB VOB SBH
1
1
2
3
4
5 12
SIL-100-03 SHC VIC V0C SHA
SCH +5V
6 11
NC1 NC2 SHB
Disable 7 10 SHC
TP15 TP16 TP17 U12
Disable Crtl2
Is
I Lim
DisableU
8 9
GND1 GND2 TEST_POINT 78L05
TEST_POINT TEST_POINT C20 C19
+600V
J1:A ADUM1310 U13 4u7
2 1 3
TP
VI+ VO+
TP
+5V VO VI
TP
1/3 GND1 4
+5Vt 4u7 DC-DCs
2/4
GND
TP4 1
VI- Com
U1
1
GND1 3
1
SIL-100-02
1 16
TEST_POINT AM1S-1212S C21
VDD1 VDD2 SLA 0.1u
2
2 15
TP
GND1 GND2 SLB
3 14
TP5
SLA VIA VOA TEST_POINT SLC
GND1
1
4 13
SLB VIB VOB SAH 3 SW1
J2
TP
SLC 5 12
VIC V0C 2 SAL
CONN-H6 6 11 1
NC1 NC2 +12V
1
SW-SPDT
7 10
Disable Disable Crtl2 TP6
8 9 SBH
J4
GND1 GND2 SW2 TEST_POINT +5Vt
3 U14:A
1
2
3
4
5
6
1 ADUM1310 2 SBL 1
TP
DisableI
2 +12V
1
3 Disable
U15
SW-SPDT 2 78L05
DisableU C25
1
CONN-SIL2
GND1 SCH
3 SW3
74HC32 4u7 1 3
J6 2
SCL 1K GND=GND1 TP8 VO VI
SHA
SLA
SHB
SLB
SHC
SLC
GND
CONN-SIL3 VCC=+5V TEST_POINT
10k
RV1 Rdt SW-SPDT
C26
TP7 J7
TP
C3 +5V 0.1u
2
TEST_POINT CONN-SIL2
0.1u
U4 +12V
1
1
2
3
7812 U7
TP
100k GND1 4 2
I Lim S0 Q0
1 3 3 DisableI
VI VO
1
GND1 R0
1
2
GND
6 9
S1 Q1
7
C8 C10 C9 C11 R21 R1
R22
HS1 HS2 HS3 HS4 HS5 HS6 0.1u 1k
2
4u7 0.1u 4u7 12 10 120
S2 Q2
DISIPADOR247 DISIPADOR247 DISIPADOR247 DISIPADOR247 DISIPADOR247 DISIPADOR247 11
R2
14 1
S3 Q3
15
R3
Pin1 Pin2 Pin1 Pin2 Pin1 Pin2 Pin1 Pin2 Pin1 Pin2 Pin1 Pin2 GND1 5 D7
E LED
4043
C12 VDD=+5V
0.1u VSS=GND1
Figura 6. Diagrama del inversor (parte 1) Figura 8. Diagrama del inversor (parte 3)
III. C ONSTRUCCI ÓN Y EVALUACI ÓN DEL
R25 D10 D9
R24 D8
10
UF4001 10
UF4001
R23
10
UF4001
DISPOSITIVO
C4
C7 C6 C23 C13 C2 C24
U2 C5 U3 U5
56u C22 2 56u 0.1u 2
VI+ VO+
56u
0.1u
2 VI+ VO+ 4
VI+ VO+ 0.1u 4u7 4 4u7 DC-DCs
4 DC-DCs
4u7 DC-DCs 1 1
1 VI- Com VI- Com
VI- Com 3 3
+12V
AM1S-1212S
3
IC1
R2 +12V
AM1S-1212S
IC2
R1
120
+12V
AM1S-1212S
IC3
R6
120
Por conveniencia el prototipo está construido en par-
120
D3 B-H D5 R20 C-H
SAH
SAL
VCC
HIN
LIN
HO
VB
VS
UF4001
D1 R18
10
SBH
A-H
SBL
VCC
HIN
LIN
HO
VB
VS
UF4001
R19
10 SCH
SCL
VCC
HIN
LIN
HO
VB
VS
UF4001
10 tes. El sistema final es una combinación de tres tarjetas.
Rdt DT COM R8 Rdt DT COM R7
Rdt DT
VSS
IRS21834
LO
COM R3
120
D2 R4
A
A-L
VSS
IRS21834
LO
120
D4 R16
B
B-L
VSS
IRS21834
LO
120
D6 R17
C
C-L
En la primer tarjeta está el rectificador trifásico con
10 10
UF4001
10
UF4001 UF4001
protecciones contra sobrecorriente en la entrada y en la
+600V
salida. En la segunda tarjeta está el convertidor reductor
C1 U11 +12V
0.1u
FU1
20A 1
78L05
VO VI
3 de voltaje de corriente directa. El inductor construido
GND
TP11 C16
TP9 TP10 TEST_POINT
0.1u
C14 U9 C15
soporta 10A continuos de corriente. La tercer tarjeta
2
Q1 TEST_POINT Q3
TEST_POINT
Q5 4u7
4
VO+ VI+
2 4u7
TP
IRFP4232PBF IRFP4232PBF DC-DCs
IRFP4232PBF 1
Com VI-
TP
A-H
TP
B-H C-H 3
AM1S-1212S
corresponde a inversor trifásico con protecciones contra
1
R5 R11 R12
1
1
56k
56k 56k GND1
U10:B
Q2 Q4 Q6 R13 R14 RV8
sobre corriente y con señales de control aisladas eléctri-
4
A
IRFP4232PBF IRFP4232PBF B IRFP4232PBF C U10:A
A-L B-L 1k 1k 5
4
C-L C17 C18 7
U8 6 3
R10 R15 4
IP+ VCC
1 0.1u 0.1u 1
R9
3 100k 2
LM358
camente.
8
56k VIOUT
56k LM358
56k
5 2
8
IP- GND
I Lim
ACS755XCB-050
La evaluación del prototipo completo se hizo por
Is
partes. Primero se evaluó el rectificador. Las primeras
Figura 7. Diagrama del inversor (parte 2)
pruebas fueron para asegurarse que las protecciones
funcionaran. Se evaluó la parte que limita la corriente
al inicio y desconecta el limitador una vez cargados los
puede ser variado con un potenciómetro. Si la señal del capacitores.
filtro es mayor a la de consigna, entonces se activa un La evaluación del reductor de voltaje arrojó que el
circuito digital. Este a su vez desactiva las señales de rizo de voltaje obtenido es de 5 % (medido a 40Khz).
control del inversor. Al desactivar las señales de control Esto se puede observar en la figura 9. Este resultado es
los transistores superiores de los totems se apagan y los bastante aceptable para alimentar la etapa siguiente que
de inferiores se activan, conectando las terminales de las es el inversor trifásico.
fases del inversor a tierra para descargar la energı́a del El hardware del lazo de control del convertidor reduc-
motor conectado. tor tiene como componente principal una tarjeta con un
procesador ARM Cortex M4 con una frecuencia máxima
El circuito digital cuenta con una memoria que una
de operación de 120Mhz, del fabricante NXP (kinetis-
vez activada se queda en ese estado hasta que se reinicie
K64FMIN). De esta tarjeta se utilizaron una unidad de
manualmente. El reinicio manual previene que ante un
temporizador, 3 canales del convertidor análogo digital y
corto circuito en las salidas del inversor la corriente fluya
el puerto serial para poder evaluar el control programado.
de nuevo hasta que el usuario revise las conexiones y/o
La tarjeta del convertidor reductor tiene un espacio para
secuencia de activación de los transistores.
albergar la tarjeta de desarrollo y poder hacer pruebas
El diseño completo del inversor se puede observar en y evaluar el programa que controla la conmutación del
las figuras 6, 7 y 8. reductor de voltaje de forma más sencilla.
RVP-AI/2018 5
de una toma monofásica. Esto permitirá que el MI-T tan
usado en la industria por sus ventajas, ahora también
pueda ser usado en aplicaciones domésticas o pequeños
talleres. El costo extra que representa el dispositivo
puede ser absorbido en corto plazo por los ahorros de
energı́a y el mantenimiento que se tienen al usar un MI-T
en lugar de uno monofásico.
Antes de que este dispositivo sea considerado un
producto se deben desarrollar los lazos de control del
convertidor cd/cd y el inversor.
Si en lugar de un convertidor reductor se emplea un
elevador o un reductor-elevador, la combinación cd/cd
Figura 9. Rizo de Voltaje a 40khz con el inversor podrı́a ser empleada para alimentar un
motor empleando baterı́as, con la posibilidad incluso de
optimizar el consumo de energı́a.
R EFERENCIAS
[1] Bimal K Bose. Power electronics and motor drives recent
progress and perspective. IEEE Transactions on Industrial
Electronics, 56(2):581–588, 2009.
[2] C-c Chen, Deepakraj M Divan, and DW Novotny. A single phase
to three phase power converter for motor drive applications. In
Industry Applications Society Annual Meeting, 1992., Conference
Record of the 1992 IEEE, pages 639–646. IEEE, 1992.
[3] Euzeli Cipriano, Cursino Brandao Jacobina, Edison Roberto Ca-
bral da Silva, and Nady Rocha. Single-phase to three-phase
power converters: State of the art. IEEE Transactions on Power
Electronics, 27(5):2437–2452, 2012.
Figura 10. Voltajes de fase [4] Juan José González de la Rosa. Circuitos electrónicos con
amplificadores operacionales: problemas, fundamentos teóricos
y técnicas de identificación y análisis. Marcombo, 2001.
[5] FZ Hamidon, IH Mohd Ali, MN Khadari, PD Abd Aziz, and
Para la evaluación del conjunto: fuente de CD – NH Mohd Yunus. Design of single phase to three phase static po-
inversor – MT-I, se programó en una segunda tarjeta de wer converter. In Engineering Technology and Technopreneuship
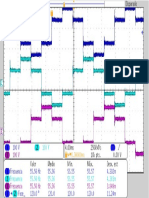
control, un PWM senoidal ([6]). Con el PWM senoidal, (ICE2T), 2014 4th International Conference on, pages 266–271.
IEEE, 2014.
se activan y desactivan los transistores formando 3
[6] Jun-ichi Itoh and Takumi Ogura. Evaluation of total loss for an
señales sinusoidales que son suministradas al motor (ver inverter and motor by applying modulation strategies. In Power
figura 10). A partir de estas 3 señales el motor gira en Electronics and Motion Control Conference (EPE/PEMC), 2010
función de la velocidad de las señales sinusoidales y de 14th International, pages S12–21. IEEE, 2010.
[7] Ned Mohan and Tore M Mohan. Power electronics, volume 3.
la carga mecánica que tenga conectada. John wiley & sons New York, 1995.
[8] Muhammad H Rashid. Electrónica de potencia: circuitos,
IV. C ONCLUSIONES dispositivos y aplicaciones. Pearson Educación, 2004.
En este artı́culo se ha presentado el desarrollo de un
dispositivo capaz de alimentar un motor trifásico a partir
RVP-AI/2018 6
Alfredo Lezama nació en la Ciudad de Méxi- Domingo Cortés Nació en Chiapas, México.
co, México. Obtuvo el grado de Ingeniero en Recibió el tı́tulo de Ingeniero en Comunica-
Comunicaciones y Electrónica en la Escue- ciones y Electrónica del Instituto Politécnico
la Superior Ingenierı́a Mecánica y Eléctrica Nacional (1994), el grado de Maestro en Cien-
(ESIME) del Instituto Politécnico Nacional cias del CINVESTAV-IPN (1995) y el grado de
(IPN) en 2013. Es estudiante de Maestrı́a en Doctor en Ciencias del CICESE (2004). Fue
Microelectrónica en la Sección de Estudios y jefe de la Unidad de Ingenierı́a de Cómputo
Posgrado de la ESIME Culhuacan IPN. Las del CIC-IPN (2007-2008). Actualmente está
áreas de su interés son el control de sistemas adscrito a la Escuela Superior de Ingenierı́a
dinámicos y la electrónica de potencia. Mecánica y Eléctrica, Unidad Culhuacan del Instituto Politécnico
Nacional.
Jorge Resa nació en la Ciudad de México.
Recibió el grado de Ingeniero en Mecatróni-
ca en el Instituto Tecnológico y de Estudios Juan Francisco Márquez obtuvo el grado
Superiores de Monterrey (ITESM) en 2004. de doctor en ciencias (2012) en el Instituto
Fue profesor de catedra en el ITESM campus Politécnico Nacional (IPN) en la Sección de
Ciudad de México (2005-2012) en el Depar- Estudios de Posgrado e Investigación, ESIME
tamento de Mecatrónica. Obtuvo el grado de Culhuacan. Actualmente trabaja como profesor
Maestrı́a en Ciencias de la Ingenierı́a en Sis- de tiempo completo en el IPN, ESIME Culhua-
temas Energéticos en el Instituto Politécnico can, en la ciudad de México. Sus intereses de
Nacional (IPN) en 2015. Actualmente estudia su Doctorado en investigación se enfocan en la estabilización y
Electrónica y Comunicaciones en el IPN en la Ciudad de México. control de sistemas con retardo, control óptimo
Sus áreas de interés son la electrónica de potencia y el control de y robusto.
motores eléctricos.
S-ar putea să vă placă și
- Adq DatosDocument5 paginiAdq DatosAalfredo Lezama RamirezÎncă nu există evaluări
- Trifasico Eps Converted ToDocument1 paginăTrifasico Eps Converted ToAalfredo Lezama RamirezÎncă nu există evaluări
- Clase06Sistemas de Primer OrdenDocument12 paginiClase06Sistemas de Primer OrdenANDYVASPÎncă nu există evaluări
- Clase07Sistemas de Segundo OrdenDocument21 paginiClase07Sistemas de Segundo OrdenMartinez RaulÎncă nu există evaluări
- Clase 02Document10 paginiClase 02Aalfredo Lezama RamirezÎncă nu există evaluări
- Diagrama de Flujo de Señal. Formula de MassonDocument19 paginiDiagrama de Flujo de Señal. Formula de MassonEdson ArandiaÎncă nu există evaluări
- Análisis error estacionario sistemas ordenDocument18 paginiAnálisis error estacionario sistemas ordenmac3011Încă nu există evaluări
- Transformada de LaplaceDocument11 paginiTransformada de LaplacetemohpÎncă nu există evaluări
- Clase 03 Lap Lacey ControlDocument64 paginiClase 03 Lap Lacey ControlDiego AndrésÎncă nu există evaluări
- Referencia Eps Converted ToDocument1 paginăReferencia Eps Converted ToAalfredo Lezama RamirezÎncă nu există evaluări
- Clase 04Document15 paginiClase 04Aalfredo Lezama RamirezÎncă nu există evaluări
- Manual RevisadoDocument14 paginiManual RevisadoAalfredo Lezama RamirezÎncă nu există evaluări
- Introduccion A ControlDocument20 paginiIntroduccion A ControlMoises MartinezÎncă nu există evaluări
- 23marzo MicrosDocument6 pagini23marzo MicrosAalfredo Lezama RamirezÎncă nu există evaluări
- Medios de TransmisiónDocument11 paginiMedios de TransmisiónAalfredo Lezama RamirezÎncă nu există evaluări
- Y(s) U (S) S +1) (s+2) : Función de TransferenciaDocument1 paginăY(s) U (S) S +1) (s+2) : Función de TransferenciaAalfredo Lezama RamirezÎncă nu există evaluări
- Programa TriangularDocument1 paginăPrograma TriangularAalfredo Lezama RamirezÎncă nu există evaluări
- Diagrama-Electr Nico PDFDocument5 paginiDiagrama-Electr Nico PDFrflores3Încă nu există evaluări
- Reductor 1Document1 paginăReductor 1Aalfredo Lezama RamirezÎncă nu există evaluări
- Seguidor LineaDocument13 paginiSeguidor LineaAalfredo Lezama RamirezÎncă nu există evaluări
- Fuente de Alimentacion y DisplayDocument5 paginiFuente de Alimentacion y DisplayAalfredo Lezama RamirezÎncă nu există evaluări
- Unidad 5 FinalDocument6 paginiUnidad 5 FinalAalfredo Lezama RamirezÎncă nu există evaluări
- HolaDocument4 paginiHolaAalfredo Lezama RamirezÎncă nu există evaluări
- Voltajes de FaseDocument1 paginăVoltajes de FaseAalfredo Lezama RamirezÎncă nu există evaluări
- Prac2 2Document14 paginiPrac2 2Aalfredo Lezama RamirezÎncă nu există evaluări
- Máquinas de Estado FinitoDocument18 paginiMáquinas de Estado FinitoKevin RiveraÎncă nu există evaluări
- Guias de OndaDocument22 paginiGuias de OndaAalfredo Lezama RamirezÎncă nu există evaluări
- Comparativa entre HOMERF e HIPERLAN, estándares para redes inalámbricas domésticasDocument11 paginiComparativa entre HOMERF e HIPERLAN, estándares para redes inalámbricas domésticasAalfredo Lezama RamirezÎncă nu există evaluări
- Diagrama-Electr Nico PDFDocument5 paginiDiagrama-Electr Nico PDFrflores3Încă nu există evaluări
- Manual de UsuarioDocument8 paginiManual de UsuarioAalfredo Lezama RamirezÎncă nu există evaluări
- 2 1Document4 pagini2 1asaph árbol osoÎncă nu există evaluări
- Variador de Velocidad de Motor DCDocument28 paginiVariador de Velocidad de Motor DCAlex SanchezÎncă nu există evaluări
- Cuestionario Final 4Document6 paginiCuestionario Final 4ChristianCastilloÎncă nu există evaluări
- Motores síncronos: funcionamiento y velocidad de sincronismoDocument19 paginiMotores síncronos: funcionamiento y velocidad de sincronismoSantiago Rua AlvarezÎncă nu există evaluări
- Estado Del Arte Maquinas ElectricasDocument14 paginiEstado Del Arte Maquinas ElectricasJonattan NiñoÎncă nu există evaluări
- Maquina SincronaDocument11 paginiMaquina Sincronabarbara rendon100% (2)
- Motores para El Accionamiento de Bombas, Ventiladores y CompresoresDocument15 paginiMotores para El Accionamiento de Bombas, Ventiladores y CompresoresGabriela Sanchez Perez100% (1)
- Manual Sistema Electrico Nissan PDFDocument110 paginiManual Sistema Electrico Nissan PDFluis tocora100% (1)
- Pump Cavity Progressive ManualDocument74 paginiPump Cavity Progressive Manualginozky100% (3)
- Unidad 4 Maquinas Sincronas y de CDDocument16 paginiUnidad 4 Maquinas Sincronas y de CDtonyÎncă nu există evaluări
- Conversión ElectromecánicaDocument20 paginiConversión ElectromecánicaGeraldine YeffeÎncă nu există evaluări
- Componentes máquina CDDocument3 paginiComponentes máquina CDLaura JPÎncă nu există evaluări
- L6 La Maquina DCDocument17 paginiL6 La Maquina DCJC FigueroaÎncă nu există evaluări
- Alternadores 1Document23 paginiAlternadores 1Alex Cristian Saavedra ContrerasÎncă nu există evaluări
- 6 - Cálculo Protecciones Motores TrifásicosDocument4 pagini6 - Cálculo Protecciones Motores Trifásicosjuanmanueljimenezcortes5Încă nu există evaluări
- Informe de MantenimientoDocument9 paginiInforme de MantenimientoDaryanii Andres Orozco ValenciaÎncă nu există evaluări
- Protección de motores trifásicos contra pérdida de faseDocument8 paginiProtección de motores trifásicos contra pérdida de faseMERA VILLACIS SANDY ISRAELÎncă nu există evaluări
- Circuitos Eléctricos Mcgraw HillDocument27 paginiCircuitos Eléctricos Mcgraw HillInma CortésÎncă nu există evaluări
- PASO 3 - EXPLORAR LOS FUNDAMENTOS Y APLICACIONES DE LOS DISPOSITIVOS SEMICONDUCTORESTransistorDocument8 paginiPASO 3 - EXPLORAR LOS FUNDAMENTOS Y APLICACIONES DE LOS DISPOSITIVOS SEMICONDUCTORESTransistorLuiska OrozcoÎncă nu există evaluări
- Selección de protecciones y arranque para 8 motoresDocument4 paginiSelección de protecciones y arranque para 8 motoreskevin mintaÎncă nu există evaluări
- Motores de Corriente AlternaDocument10 paginiMotores de Corriente AlternaGerardo GuzmanÎncă nu există evaluări
- Marketing-Introduccion-ConceptosDocument43 paginiMarketing-Introduccion-ConceptosDiana Patricia Macias MoralesÎncă nu există evaluări
- Motor, Generador y TransformadorDocument2 paginiMotor, Generador y TransformadorInternet MilleniumÎncă nu există evaluări
- Foro Temático Factor de PotenciaDocument2 paginiForo Temático Factor de PotenciaLyznicolle PerezÎncă nu există evaluări
- Mantenimiento preventivo de motores eléctricosDocument10 paginiMantenimiento preventivo de motores eléctricosEDUAR EDGARDO RAMOS TAPIAS100% (2)
- Partes de Un DronDocument13 paginiPartes de Un DronCristhofer jhoel Montaño saavedraÎncă nu există evaluări
- Motor Eléctrico CaseroDocument6 paginiMotor Eléctrico CaseroAnonymous FswVWOÎncă nu există evaluări
- Ventajas y Diferencias Los Motores Trifásicos y Monofásicos ExpoDocument8 paginiVentajas y Diferencias Los Motores Trifásicos y Monofásicos Expochristian_churaÎncă nu există evaluări
- Proyecto Maquinas EstaticasDocument82 paginiProyecto Maquinas EstaticasDāvīd Sōtō Dēlgādō0% (1)
- Parcial de Maquinas Electricas IiDocument6 paginiParcial de Maquinas Electricas Iifarid aldahir buelvas palaciosÎncă nu există evaluări