S-ar putea să vă placă și
- Tarot Card Meanings PDFDocument11 paginiTarot Card Meanings PDFpsychic_jason0071319100% (2)
- George Harman - WIRE BONDING IN MICROELECTRONICS, 3 - E (2010, McGraw-Hill Professional) PDFDocument448 paginiGeorge Harman - WIRE BONDING IN MICROELECTRONICS, 3 - E (2010, McGraw-Hill Professional) PDFpsychic_jason0071319100% (4)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsDe la EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsÎncă nu există evaluări
- My ResignationDocument2 paginiMy Resignationpsychic_jason0071319Încă nu există evaluări
- Sanjay Dabral, Timothy J. Maloney - Basic ESD and IO Design (1998, Wiley-Interscience)Document316 paginiSanjay Dabral, Timothy J. Maloney - Basic ESD and IO Design (1998, Wiley-Interscience)psychic_jason0071319100% (3)
- Final Report Buck ConverterDocument30 paginiFinal Report Buck Converter015Maulana Malik IbrahimÎncă nu există evaluări
- ABAP Training PlanDocument4 paginiABAP Training PlanAhmed HamadÎncă nu există evaluări
- 19 04 20 p2 PDFDocument32 pagini19 04 20 p2 PDFGovind SajuÎncă nu există evaluări
- Refining Corrosion Technologist NACE-RCT-001: NACE Cathodic Protection Technician (CP 2) Written ExamDocument16 paginiRefining Corrosion Technologist NACE-RCT-001: NACE Cathodic Protection Technician (CP 2) Written Examshoaib1985100% (1)
- Fault AnalysisDocument84 paginiFault AnalysisDHILDAARÎncă nu există evaluări
- TransientDocument8 paginiTransientQuazi Mosaddequl HaqueÎncă nu există evaluări
- EE2023 Signals & Systems Revision Notes: 1 Circuit Elements and Their ModelsDocument15 paginiEE2023 Signals & Systems Revision Notes: 1 Circuit Elements and Their ModelsFarwaÎncă nu există evaluări
- PowerSystem Set2Document12 paginiPowerSystem Set2Sushupthi R KoushikÎncă nu există evaluări
- EEE-601 Power System Analysis Unit-1Document17 paginiEEE-601 Power System Analysis Unit-1Marcelo SantanaÎncă nu există evaluări
- Chapter7 Symmetrical FaultsDocument44 paginiChapter7 Symmetrical Faultsoadipphone7031Încă nu există evaluări
- Power System Analysis: Fault Analysis Tom Overbye and Ross BaldickDocument35 paginiPower System Analysis: Fault Analysis Tom Overbye and Ross BaldickhanythekingÎncă nu există evaluări
- ECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisDocument40 paginiECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisWajahat Ullah Khan TareenÎncă nu există evaluări
- ECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisDocument40 paginiECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisWajahat Ullah Khan TareenÎncă nu există evaluări
- Balanced Fault AnalysisDocument76 paginiBalanced Fault AnalysisAkash IyerÎncă nu există evaluări
- ECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisDocument40 paginiECE 476 Power System Analysis: Lecture 19: Short Circuit AnalysisVladimir Q. MéndezÎncă nu există evaluări
- Alternating Current - Revision Session-HandbookDocument4 paginiAlternating Current - Revision Session-Handbooklol344466Încă nu există evaluări
- Chapter 3 and 4Document128 paginiChapter 3 and 4selaroth168Încă nu există evaluări
- CH 09Document66 paginiCH 09Praveen Kumar Kilaparthi0% (1)
- ESC201T L14 Phasor AnalysisDocument23 paginiESC201T L14 Phasor AnalysisRachit MahajanÎncă nu există evaluări
- Symmetrical Faults PDFDocument27 paginiSymmetrical Faults PDFHassan LalaÎncă nu există evaluări
- 4a. SMTransientAnalysisDocument7 pagini4a. SMTransientAnalysisAnondo SarbabidyaÎncă nu există evaluări
- Assignment 3Document15 paginiAssignment 3Jofy GeorgeÎncă nu există evaluări
- Chapter 5 DC To DC Converters: OutlineDocument25 paginiChapter 5 DC To DC Converters: OutlinemadihaÎncă nu există evaluări
- Torque - Slip Characteristic of A Three - Phase Induction MachineDocument28 paginiTorque - Slip Characteristic of A Three - Phase Induction MachineAli AltahirÎncă nu există evaluări
- ESC201T L11 RLC CircuitsDocument31 paginiESC201T L11 RLC CircuitsRachit MahajanÎncă nu există evaluări
- TD3 SolutionDocument3 paginiTD3 Solutionboulahdour.ayoub.g55Încă nu există evaluări
- Power Worked ExamplesDocument9 paginiPower Worked Examplesbilawal shakirÎncă nu există evaluări
- EPS - Performance of Transmission LinesDocument5 paginiEPS - Performance of Transmission LinesBhumi VavadiyaÎncă nu există evaluări
- Power Consumption in CMOSDocument33 paginiPower Consumption in CMOSGagandeep Singh DhingraÎncă nu există evaluări
- Primitive Machine: Axis: Dealized Achine QuationsDocument13 paginiPrimitive Machine: Axis: Dealized Achine QuationsBea DucaoÎncă nu există evaluări
- Chapter 11 - AC Power AnalysisDocument69 paginiChapter 11 - AC Power AnalysisFaizul Haque NiloyÎncă nu există evaluări
- Dynamics of The Synchronous Machine: ELEC0047 - Power System Dynamics, Control and StabilityDocument50 paginiDynamics of The Synchronous Machine: ELEC0047 - Power System Dynamics, Control and StabilityLawiii KkkÎncă nu există evaluări
- Lect13 Examples PDFDocument13 paginiLect13 Examples PDFAnas MahmoodÎncă nu există evaluări
- 信號期中大抄Document2 pagini信號期中大抄林昱呈Încă nu există evaluări
- AC Circuit Power AnalysisDocument30 paginiAC Circuit Power AnalysisibrahimÎncă nu există evaluări
- Đ Án Rơ Le DuyDocument44 paginiĐ Án Rơ Le Duynam phuongÎncă nu există evaluări
- Energy Conversion and Power ElectronicsDocument153 paginiEnergy Conversion and Power ElectronicsMedyouÎncă nu există evaluări
- Analog Electronics Lecture-27-21032024Document24 paginiAnalog Electronics Lecture-27-21032024Sayam SanchetiÎncă nu există evaluări
- PDO Course 2Document67 paginiPDO Course 21MM1R HL'Încă nu există evaluări
- Power SystemDocument4 paginiPower SystemPankaj KaleÎncă nu există evaluări
- Anatomy of A Short Circuit - Open ElectricalDocument5 paginiAnatomy of A Short Circuit - Open ElectricalHerman DamanikÎncă nu există evaluări
- Chp11-AC Power AnalysisDocument25 paginiChp11-AC Power Analysisavishek aviÎncă nu există evaluări
- Alternating CurrentDocument21 paginiAlternating CurrentRudresh SinghÎncă nu există evaluări
- Where Do You Need This?: 1.maintenance Engineer 2.energy Management System 3.energy ManagerDocument46 paginiWhere Do You Need This?: 1.maintenance Engineer 2.energy Management System 3.energy Managerconference RequirementsÎncă nu există evaluări
- Ac PhysicsDocument32 paginiAc PhysicsNarender KumarÎncă nu există evaluări
- 3+formulas Add Elex CircuitsDocument7 pagini3+formulas Add Elex CircuitsMark kervin natividadÎncă nu există evaluări
- The Figure (From: This PublicationDocument2 paginiThe Figure (From: This PublicationSara Ben AmaraÎncă nu există evaluări
- Mechanical Systems: Translational RotationalDocument30 paginiMechanical Systems: Translational RotationalHussainÎncă nu există evaluări
- Eca 1 ProblemsDocument15 paginiEca 1 ProblemsAhmed SohailÎncă nu există evaluări
- Sample Problems: 112-Topic 9: Inductance & Transient DC Circuit ProblemsDocument7 paginiSample Problems: 112-Topic 9: Inductance & Transient DC Circuit ProblemssumithraÎncă nu există evaluări
- Impatt DiodeDocument16 paginiImpatt DiodesmallwolfÎncă nu există evaluări
- AC Circuits: Fundamentals of Electric CircuitsDocument16 paginiAC Circuits: Fundamentals of Electric CircuitsHiếu Dương100% (1)
- Exp 6 7 9Document18 paginiExp 6 7 9ViswaÎncă nu există evaluări
- Kuya BonerDocument2 paginiKuya BonerUli TownÎncă nu există evaluări
- Short Circuit Studies: o Ratings of BreakersDocument34 paginiShort Circuit Studies: o Ratings of BreakersElsayed Abdelmagid MohamedÎncă nu există evaluări
- Lecture 4 - Sensor Interface CircuitsDocument19 paginiLecture 4 - Sensor Interface CircuitsAnonymous eL4Dsp1BaÎncă nu există evaluări
- Esc201t l10 RC RL CircuitsDocument34 paginiEsc201t l10 RC RL CircuitsRachit MahajanÎncă nu există evaluări
- Ministry of Science and Technology Department of Technical and Vocational EducationDocument17 paginiMinistry of Science and Technology Department of Technical and Vocational Educationdeepshikhasharma230191Încă nu există evaluări
- Msphdsamplesq Ee2 PDFDocument5 paginiMsphdsamplesq Ee2 PDFbibiÎncă nu există evaluări
- Sinusoids, Phasors, and Steady-State AnalysisDocument53 paginiSinusoids, Phasors, and Steady-State AnalysisryanÎncă nu există evaluări
- Controls Combined Lecture NotesDocument312 paginiControls Combined Lecture NotesA FÎncă nu există evaluări
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99De la EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Încă nu există evaluări
- SolicitDocument1 paginăSolicitpsychic_jason0071319Încă nu există evaluări
- Autodesk Inventor FundamentalsDocument3 paginiAutodesk Inventor Fundamentalspsychic_jason0071319Încă nu există evaluări
- SolicitDocument1 paginăSolicitpsychic_jason0071319Încă nu există evaluări
- Tube Case Holder PAGE 3 of 3: NXP Semiconductors Cabuyao, IncDocument1 paginăTube Case Holder PAGE 3 of 3: NXP Semiconductors Cabuyao, Incpsychic_jason0071319Încă nu există evaluări
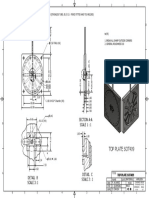
- Stage 1 Die Insert AssemblyDocument1 paginăStage 1 Die Insert Assemblypsychic_jason0071319Încă nu există evaluări
- Sales Summary Report: Invoice No Invoice Date Customer Name Model No Brand NameDocument2 paginiSales Summary Report: Invoice No Invoice Date Customer Name Model No Brand Namepsychic_jason0071319Încă nu există evaluări
- Tube Case Holder PAGE 1 of 3: NXP Semiconductors Cabuyao, IncDocument1 paginăTube Case Holder PAGE 1 of 3: NXP Semiconductors Cabuyao, Incpsychic_jason0071319Încă nu există evaluări
- PDFDocument13 paginiPDFpsychic_jason0071319Încă nu există evaluări
- SOT409Document1 paginăSOT409psychic_jason0071319Încă nu există evaluări
- Basic Terms in Excel: Formulas and FunctionsDocument8 paginiBasic Terms in Excel: Formulas and Functionspsychic_jason0071319Încă nu există evaluări
- Scanner AssemblyDocument1 paginăScanner Assemblypsychic_jason0071319Încă nu există evaluări
- Ferrite Mag-Amp: in Set Mode Utilizing A Switching Drive CircuitDocument7 paginiFerrite Mag-Amp: in Set Mode Utilizing A Switching Drive Circuitpsychic_jason0071319Încă nu există evaluări
- LectureDocument39 paginiLecturepsychic_jason0071319Încă nu există evaluări
- DSDSDDocument1 paginăDSDSDpsychic_jason0071319Încă nu există evaluări
- Asme Ix Test 1Document8 paginiAsme Ix Test 1RedzuanÎncă nu există evaluări
- Iec 60243-1-2013Document58 paginiIec 60243-1-2013FernandoCrespoMon100% (1)
- Cat Hammers C842898Document8 paginiCat Hammers C842898maggioraÎncă nu există evaluări
- Experimental Techniques For Low Temperature Measurements PDFDocument2 paginiExperimental Techniques For Low Temperature Measurements PDFVanessaÎncă nu există evaluări
- Honda IDSI SM - 5 PDFDocument14 paginiHonda IDSI SM - 5 PDFauto projectÎncă nu există evaluări
- Signal Integrity Modeling and Measurement of TSV in 3D ICDocument4 paginiSignal Integrity Modeling and Measurement of TSV in 3D IC張志榮Încă nu există evaluări
- EC205 Mathematics For Economics and Business: The Straight Line and Applications IIDocument3 paginiEC205 Mathematics For Economics and Business: The Straight Line and Applications IIpereÎncă nu există evaluări
- 7.GSM ChannelsDocument24 pagini7.GSM Channelsmanthasaikarthik100% (1)
- Ch-21 Runoff TrianglesDocument9 paginiCh-21 Runoff TrianglesIsha TachhekarÎncă nu există evaluări
- OODBMSDocument19 paginiOODBMSashimsarkar2006Încă nu există evaluări
- Beginners Tutorial: Issue Status/Number - 1.0 Issue Date - 10 November, 2002Document17 paginiBeginners Tutorial: Issue Status/Number - 1.0 Issue Date - 10 November, 2002nathulalusaÎncă nu există evaluări
- B 1 1 4 Inplant Fluid FlowDocument5 paginiB 1 1 4 Inplant Fluid FlowBolívar AmoresÎncă nu există evaluări
- Review Paper - Evolution of CMOS Ring OscillatorDocument10 paginiReview Paper - Evolution of CMOS Ring OscillatorNor Samida YaacobÎncă nu există evaluări
- OcrDocument16 paginiOcrBeena JaiswalÎncă nu există evaluări
- 2 Engleza Oscilatii ArmoniceDocument12 pagini2 Engleza Oscilatii ArmoniceMIRCEA-PAUL TĂNĂSESCUÎncă nu există evaluări
- Demag KBK Alu Enclosed Track SystemDocument2 paginiDemag KBK Alu Enclosed Track SystemMAGSTÎncă nu există evaluări
- V7R3 Recovery Guide Sc415304Document560 paginiV7R3 Recovery Guide Sc415304gort400Încă nu există evaluări
- Me (3) - 2Document16 paginiMe (3) - 2aviralÎncă nu există evaluări
- TM1 Rules White Paper Best Practice RulesDocument22 paginiTM1 Rules White Paper Best Practice RulesMax ChenÎncă nu există evaluări
- Research FinalDocument29 paginiResearch FinalLaw VesperaÎncă nu există evaluări
- Circuit Protective Devices: Learner Work BookDocument41 paginiCircuit Protective Devices: Learner Work BookChanel Maglinao80% (5)
- Ee-502 Unit - IDocument2 paginiEe-502 Unit - IVARAPRASADÎncă nu există evaluări
- Construction Materials and TestingDocument23 paginiConstruction Materials and TestingJaymark S. GicaleÎncă nu există evaluări
- 5.3.2 To Sketch Graphs of Trigonometric Functions (Part 2) - SPM Additional MathematicsDocument3 pagini5.3.2 To Sketch Graphs of Trigonometric Functions (Part 2) - SPM Additional MathematicsLuke SuouÎncă nu există evaluări
- Failure Mode and Effects Analysis of A Process of Reflow Lead-Free SolderingDocument5 paginiFailure Mode and Effects Analysis of A Process of Reflow Lead-Free SolderingSRIDHAREEE61Încă nu există evaluări
- Naca 4412Document3 paginiNaca 4412Selva KumarÎncă nu există evaluări
- Dbms-Lab Assignment - 1: Name - VIKAS SINGH Roll No - 4257Document3 paginiDbms-Lab Assignment - 1: Name - VIKAS SINGH Roll No - 4257Vikas SinghÎncă nu există evaluări