Documente Academic
Documente Profesional
Documente Cultură
65 e 6
Încărcat de
Vikash AgarwalTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
65 e 6
Încărcat de
Vikash AgarwalDrepturi de autor:
Formate disponibile
Simplified Modeling of Irrigation Canals for Controller
Design
X. Litrico1 and V. Fromion2
Abstract: The integrator delay zero (IDZ) model presented by Litrico and Fromion is a simple way to model a canal for control purposes
that extends the classical integrator delay model. This analytical model gives a very good frequency domain approximation of the
Saint-Venant transfer matrix for a pool possibly in backwater conditions. The present paper shows how this model can be used to model
an irrigation canal for control design. The IDZ model is analyzed and its accuracy evaluated in the frequency and time domain on two
ASCE test canals for high and low flow conditions.
DOI: 10.1061/(ASCE)0733-9437(2004)130:5(373)
CE Database subject headings: Open channel flow; Hydraulic models; Analytical models; Laplace transform; Frequency response;
Canals; Irrigation.
Introduction mion (2004a), which is parameterized by the downstream water
elevation and the reference discharge.
A classical way to control irrigation canals is to design controllers This problem has already been considered in the literature.
based only on linear models, even if the open-channel dynamics Simple models have been obtained for the Saint-Venant equations
described by Saint-Venant equations are nonlinear. This heuristic linearized around a uniform regime (Shand 1971; Corriga et al.
approach is widespread for control of nonlinear systems, e.g., 1979; Ermolin 1992; Hancu and Dan 1992). In that case, analyti-
airplanes, nuclear power plants, etc. It has also been used (implic- cal expressions are available that allow one to make simple ap-
proximations, leading to approximate rational models (possibly
itly or explicitly) in many cases for canal controller design (e.g.,
including a time delay).
Shand 1971; Balogun 1985; Malaterre 1998; Schuurmans et al.
Unfortunately, the uniform regime is seldom observed in prac-
1999b) and has shown its efficiency in real applications (Rogier et
tical situations, because it requires constant discharges and water
al. 1987; Deltour 1995; Litrico et al. 2003). This motivates a
depths along the pool. Moreover, hydraulic structures are gener-
detailed study of linear models for Saint-Venant equations, ob-
ally used in irrigation canals to raise the water level at some
tained by considering small deviations of hydraulic variables control points, which influences the flow upstream (i.e., there is a
around a given constant steady state. These linearized Saint- backwater curve). This is why it is necessary to develop simple
Venant equations are still partial derivative equations, which are models for realistic cases, i.e., for canal pools under backwater. A
not easy to deal with directly for control. possible way to take into account the nonuniform regime is to
It is therefore important to obtain simplified models of irriga- derive linear models from numerical schemes used to solve the
tion canals for control design. It would be even more interesting Saint-Venant equations (Balogun 1985; Malaterre 1998). Unfor-
to have linear models that explicitly depend on physical param- tunately, it seems difficult and questionable to use this approach
eters. Such models would allow one to to derive a simple model. Indeed, this numerical approach leads
• Handle the dynamics of the system with few parameters, to complex models with a large number of parameters. More
• Understand the impact of physical parameters on the dynam- theoretically, from the robust control point of view, it is better to
ics, and approximate the frequency response of a system than its time
• Facilitate the development of a systematic design method. response, because thus allows one to quantify the model error in a
The main goal of this paper is to present and demonstrate the rigorous way (Zhou and Doyel 1998).
accuracy of a new analytical model derived by Litrico and Fro- From this perspective, the approximate model proposed by
Schuurmans et al. (1999a) is a notable step towards the solution
1
Research Hydraulic Engineer, Cemagref, UR Irrigation 361, of the considered problem. They proposed an integrator delay
Rue J.F. Breton, B.P. 5095, 34033 Montpellier Cedex 1, France. (ID) model that applies to a canal under backwater flow condi-
E-mail: xavier.litrico@cemagref.fr tions, which captures with two parameters the low frequency be-
2
Research Control Engineer, INRA, LASB, 2 Place Viala, 34060 havior of the system, i.e., a delayed integrator for the transfer
Montpellier, France. E-mail: fromion@ensam.inra.fr between upstream discharge and downstream level. However, the
Note. Discussion open until March 1, 2005. Separate discussions must validity of their approximation is not clearly demonstrated. In-
be submitted for individual papers. To extend the closing date by one
deed, a first question that arises is the following: Is it valid to
month, a written request must be filed with the ASCE Managing Editor.
The manuscript for this paper was submitted for review and possible
approximate linearized Saint-Venant equations by a delayed inte-
publication on April 8, 2003; approved on February 2, 2004. This paper is grator under backwater flow conditions?
part of the Journal of Irrigation and Drainage Engineering, Vol. 130, Recent works allow one to obtain a very accurate frequency
No. 5, October 1, 2004. ©ASCE, ISSN 0733-9437/2004/5-373–383/ domain representation of Saint-Venant equations in any flow con-
$18.00. figuration (Litrico and Fromion 2004b) and show that the struc-
JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004 / 373
section is devoted to the method of application of the model to
real canals, with possible fixed intermediate hydraulic structures
and a complex geometry.
Simplified Model of a Canal Pool
Inputs/Outputs Representation of a Canal Pool
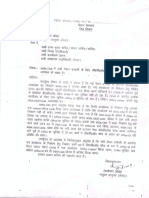
Fig. 1. Backwater profile (—) and its approximation (– –) In the following, a canal pool is modeled using a linear inputs/
ouputs approach. The model considers small deviations of hy-
draulic variables from stationary values, given by
ture of the transfer matrix is the same in uniform and backwater 关Q0 , Y 0共x兲兴—respectively, the discharge and the water depth
flow conditions: the low frequency behavior is dominated by a along the canal. The deviations from these values are denoted
delay and an integrator. It is therefore valid to approximate Saint- with small letters:
Venant equations by a delayed integrator in low frequencies. • The considered inputs are the upstream and downstream dis-
Once this is stated, the second question is how to obtain the charges q共0 , t兲 and q共X , t兲 (deviations from Q0), with X the
approximate model parameters Schuurmans et al. (1999a) pro- length of the pool; and
pose a method to compute the ID model parameters in a general • The outputs are the upstream and downstream water depths
case. The approximations they propose are, however, rather crude y共0 , t兲 and y共X , t兲 [deviations from Y 0共0兲 and Y 0共X兲].
and can be improved. Indeed, for a pool in uniform regime, they In the Laplace domain, P共s兲 denotes the 2 ⫻ 2 transfer matrix
assume that the system is a pure delay and that there is no inte- relating the inputs to the outputs and pij共s兲 = its elements (s is the
grator. But the integrator is always present in the uniform case, as Laplace variable). On this basis, the transfer matrix is then given
can be shown by direct manipulations on the Saint-Venant trans- by
fer matrix. For a pool completely affected by backwater, they
assume that the delay is zero, while the system is a pure integra-
tor. But the delay obtained by integrating the characteristics is
never equal to zero. Their model gives approximate values that 共1兲
can be far from the theoretical ones in some cases. When the
entire pool is under backwater, their ID model is obtained with a
different method, but the validity of their approximation is not Backwater Profile
clearly demonstrated.
Our objective is to get a model valid for any regime that gives The backwater curve is obtained in an exact manner by solving
accurate approximate values for the delay and the integrator gain, the ordinary differential Eq. (32) in Appendix I, which is rather
which are essential for control design. To do this, the method complicated. Following Schuurmans et al. (1999a), the backwater
proposed by the writers to obtain the frequency domain represen- curve is here approximated by a stepwise linear function: a line
tation of the Saint-Venant transfer matrix (Litrico and Fromion parallel to the bed in the upstream part (corresponding to the
2004b) has been simplified, leading to a simple approximate uniform part) and a line tangent to the real curve at the down-
model, called the integrator delay zero (IDZ) model (Litrico and stream end in the downstream part [instead of a horizontal line, as
Fromion 2004a). This model is able to represent the canal behav- chosen by Schuurmans et al. (1999a)].
ior in low and high frequencies; the integrator delay accounts for Let x1 denote the abscissa of the intersection of the two lines.
low frequencies, while the zero represents the direct influence of Formulas for x1 and the backwater profile approximation are
the discharge on the water level in high frequencies. The pro- given in Appendix III. The corresponding approximation of the
posed model is obtained from mathematical approximations of backwater profile is schematized in Fig. 1.
the exact transfer matrix. It aims at reproducing the behavior of
the system in any flow condition (including backwater flow con- Integrator Delay Zero Model of a Pool
figurations).
The new IDZ model contributions can therefore be summa- The equations given in Appendix IV deal with the complete
rized as follows: model with two outputs, but for simplicity of presentation, only
• It provides accurate approximate values of the delay and the the part corresponding to the downstream output will be presented
integrator gain for a classical ID model. here.
• It extends the ID model by adding a zero in high frequencies, The model describes how the downstream water level y共X , s兲
therefore leading to a better fit in high frequencies. This im- is related to the upstream discharge q共0 , s兲 and the downstream
proves the accuracy of the time-domain simulations. discharge q共X , s兲. Selecting the last line of Eq. (1) leads to
• All parameters can be computed analytically, leading to a
simple implementation.
The approximate model presented in Litrico and Fromion y共X,s兲 = p̂21共s兲q共0,s兲 + p̂22共s兲q共X,s兲 共2兲
(2004a) is evaluated here on test cases proposed by ASCE (Clem-
mens et al. 1998) for low and high flow conditions by: (1) com- The approximate transfer functions are denoted by p̂ij to distin-
paring the IDZ model parameters to the theoretical ones obtained guish them from the theoretical ones, pij.
following Litrico and Fromion (2004a); (2) comparing the fre- The IDZ model provides an integrator delay zero approxima-
quency response of two specific pools with the theoretical one; tion of transfer function p21 and an integrator zero approximation
and (3) comparing the time response of the considered models. A of transfer function p22, leading to the frequency domain model
374 / JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004
y共X,s兲 = 冉 1
Âds
冊
+ p̂21⬁ e−ˆ dsq共0,s兲 − 冉 1
Âds
冊
+ p̂22⬁ q共X,s兲 共3兲 p21共s兲 =
e−ds
A ds
共7兲
where s = is the Laplace variable; Âd=approximate downstream 1
equivalent backwater area (or integrator gain); ˆ d=approximate p22共s兲 = − 共8兲
A ds
delay for downstream propagation; and p̂21⬁ and p̂22⬁= high fre-
quency gain of transfer function p̂21 and p̂22, respectively. where Ad and Au=respectively, the downstream and upstream
This frequency domain model can be written as an ordinary backwater areas; and d and u=the upstream and downstream
differential equation with input delay, given by propagation time delays.
This low frequency approximation corresponds to a simple
冦
dh共t兲 integrator delay model. However, its parameters are obtained in a
Âd = q共0,t − ˆ d兲 − q共X,t兲 different way from Schuurmans et al. (1999a). The physical in-
dt 共4兲
terpretation of each term is examined in the following.
y共X,t兲 = h共t兲 + p̂21⬁q共0,t − ˆ d兲 − p̂22⬁q共X,t兲
where h共t兲 is an intermediate variable (initialized by h共0兲 Time Delay. A classical approach followed by many authors
= 0 ; y共X , t兲=output, and q共0 , t兲 and q共X , t兲=inputs. The delay ˆ d (Corriga et al. 1988; Ermolin 1992; Litrico and Georges 1999;
only occurs on the upstream discharge q共0 , t兲, while the down- Schuurmans et al. 1999a) is to approximate the frequency re-
stream discharge has a direct impact on the downstream water sponse of the system by its Taylor development in s = 0. This leads
level. to a model that fits the low frequency response of the system. If
The procedure to follow in order to obtain the model param- the approximations proposed by Schuurmans et al. (1999a) seem
eters is described subsequently; before frequency domain inter- to be efficient for time-domain simulations, they may not be
pretations of the model are given. The model is obtained by first suited for control design. From a control point of view, it is very
computing parameters for each part of the pool (the upstream part important to evaluate precisely the delay of a system, since it
in uniform flow, and the downstream part under backwater), then limits the achievable closed loop bandwidth, which is directly
using the adequate formulas for interconnection. This is summa- linked to the real-time performance (Astrom 2000). For a canal in
rized as follows, with references to the complete equations given uniform flow, we have shown that the time delay (in terms of
in the appendices. automatic control) is equal to X / 共V0 + C0兲, where X=length of the
To obtain the parameters of this approximate model, one needs pool; V0=water velocity; and C0=celerity (Litrico and Fromion
to 2002). The time delay T obtained by Schuurmans et al. (1999a) is
1. Compute the hydraulic exponent N (exponent for convey- equal to 2X / 共1 + 0兲V0, where 0 is a geometric coefficient linked
ance as a function of depth) to obtain an analytical approxi- to the form of the section (0 = 7 / 3 in a large rectangular canal).
mation for uniform depth computation, using Eqs. (37) and This time delay T can be much larger than . Such a mismatch
(38) in Appendix II; may lead to poorly tuned controllers, which will not have suffi-
2. Compute x1, delimitating uniform and backwater flow parts, cient performance when applied on the real system.
using Eqs. (39)–(42) in Appendix III; In the following, the theoretical value of the time delay d is
3. Compute Ad , d , Au , u, and pij⬁, parameters for uniform evaluated by computing the integral:
冕
flow, using Eqs. (49), (50), (53), (54), and (61)–(65) in Ap- X
dx
pendix IV; d = 共9兲
V0共x兲 + C0共x兲
4. Compute Ād , ¯d , Āu , ¯u, and p̄ij⬁, parameters for backwater 0
flow, using Eqs. (49), (50), (55), (56), (61)–(64), and (66) in This corresponds to the minimum time required for a perturbation
Appendix IV; and to travel from upstream to downstream of the pool. This is the
5. Compute the interconnection, leading to Âd , ˆ d , Âu , ˆ u, and minimum time delay of the system.
p̂ij⬁, using Eqs. (47), (48), (51), (52), and (57)–(60), in Ap- The time delay u can be evaluated in a similar way:
冕
pendix IV. X
The whole approximate model is given by explicit analytical dx
u = 共10兲
expressions that enable its coding in any computer language. The 0 C0共x兲 − V0共x兲
model is interpreted in the frequency domain, before being evalu-
ated. It corresponds to the minimum time required for a perturbation to
travel from downstream to upstream. In both cases, we recover
the classical value in the uniform case when V0 and C0 are con-
Frequency Domain Interpretations stant: d = X / 共V0 + C0兲 and u = X / 共C0 − V0兲.
Low Frequencies Approximation Integrator Gain. In the uniform case, analytical expressions are
For low frequencies, the behavior of the transfer matrix is domi- available for the transfer matrix P共s兲. Then, the integrator gain
nated by the integrator and the delays. In this case, the approxi- 1 / Ad is obtained as the value of sp21共s兲 for s = 0, which leads to
mation of the elements of transfer matrix P共s兲 reads
T20共C20 − V20兲 2 2
1 Ad = 关1 − e−␥0X/T0共C0−V0兲兴 共11兲
p11共s兲 = 共5兲 ␥0
A us
where T0=top width, ␥0 = gT0共1 + 0兲Sb; and Sb= bed slope (gen-
eral expressions for the backwater case are given in Appendix I).
e−us This result is well known, as it has been obtained by many
p12共s兲 = − 共6兲
A us authors previously (Corriga et al. 1979; Ermolin 1992). When
JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004 / 375
␥0X / T0共C20 − V20兲 is small (typically for small pools), Ad is close to Table 1. Pool Parameters for ASCE Test Canal 1
T0X, the surface area of the pool (Schuurmans et al. 1999a). X B YX
When ␥0X / T0共C20 − V20兲 becomes larger than 1, this approximation Pool (m) (m) (m)
is no longer accurate. In fact, the coefficient Ad reflects the way
1 100 1.0 0.9
the downstream water level varies when the upstream or down-
2 1,200 1.0 0.9
stream discharge varies. It can be evaluated by computing the
variation of the volume of the pool V pool with respect to the down- 3 400 1.0 0.8
stream water elevation: 4 800 0.8 0.9
5 2,000 0.8 0.9
Vpool 6 1,700 0.8 0.8
Ad = 共12兲
YX 7 1,600 0.6 0.8
8 1,700 0.6 0.8
It is clear, then, that this coefficient depends on the way the vol-
ume changes when the downstream elevation changes (Strelkoff
f i关Zi共Xi,t兲,Zi+1共0,t兲,Wi共t兲兴 = CdiWi共t兲Lvi冑2g关Zi共Xi,t兲 − Zi+1共0,t兲兴
et al. 1998), which is difficult to account for in a simple way. A
complete solution of the backwater curve must be computed in
order to obtain the so-called theoretical equivalent backwater 共18兲
area, given by Eq. (12).
where Cdi is a discharge coefficient (close to 0.6); and Lvi=gate
width.
High Frequencies Approximation
Linearizing Eq. (17), the gate can be modeled as a local feed-
For high frequencies, the delay and the gravity waves are pre-
back between the discharge and the water depth
dominant in the transfer matrix elements. For simplicity, the grav-
ity waves are approximated by a constant gain in high frequen- qi共Xi,t兲 = kiy i共Xi,t兲 + ki+1y i+1共0,t兲 + kwiwi共t兲 共19兲
cies. This leads to the approximation:
where ki = df i共Zi , Zi+1 , Wi兲 / dZi and ki+1 = df i共Zi , Zi+1 , Wi兲 / dZi+1 are
p11共s兲 = p11⬁ 共13兲 the “feedback” gains of the gate; and kwi = df i共Zi , Zi+1 , Wi兲 / dWi is
the gain of the gate opening.
Finally, a canal is represented by a series of pools intercon-
p12共s兲 = − p12⬁e−us 共14兲
nected with hydraulic structures.
p21共s兲 = p21⬁e−ds 共15兲
Model Validation
p22共s兲 = − p22⬁ 共16兲
The IDZ model accuracy is evaluated on the ASCE test canals.
where pij⬁=positive constants obtained as the mean value of These hypothetical canals were introduced by Clemmens et al.
兩pij共s兲兩 when s → ⬁, given in Eqs. (61)–(64). (1998), in order to test and compare canal controllers. Because
Such a static approximation implies that the oscillating modes the proposed analytical model can be used to design simple con-
are not modeled. Indeed, these modes are usually filtered, in order trollers (e.g., PI controllers), it is important to see whether the
not to destabilize the controller. It is not possible to actively con- model parameters values are close to the theoretical ones.
trol such oscillating modes with a PI controller (one should use a Only transfer functions p21共s兲 and p22共s兲 are considered, be-
more complex controller, with a higher order). Because this cause they are the most useful to design distant downstream or
model will be used for simple controllers design (typically filtered local upstream controllers, which is expected to be the main use
PI), it is not necessary to accurately model the modes. The static of the IDZ model. The proposed approximate values, i.e., param-
approximation is, however, necessary to correctly take into ac- eters ˆ d , Âd , p̂21⬁, and p̂22⬁, are compared with the theoretical
count the flow behavior at the hydraulic structures. It describes ones.
the direct impact of the gate opening on the water levels.
The complete IDZ model is obtained by adding the approxi-
mations for low and high frequencies. ASCE Test Cases
Both ASCE test canals present a trapezoidal geometry, with a side
Hydraulic Structures Modeling slope 1.5 and Manning coefficients n = 0.014 for canal one and
0.02 for canal two. The bed slope Sb is 0.002 for test canal one
The hydraulic structures are modeled as local linear relations be- (steep) and 0.0001 for test canal two (flat). Each canal has eight
tween the discharge q and the water depth y at a given point. pools, whose parameters are given in Tables 1 and 2, where
These relations are obtained by linearizing the discharge equa- X=length of the poo; B=bed width; and Y X=downstream water
tions around a given functioning point. depth.
Let f i denote the equation for the gate number i, involving
Zi共Xi , t兲, the water elevation at the downstream end of pool i;
Zi+1共0 , t兲, the water elevation at the upstream end of pool i + 1; the Hydraulic Exponents
discharge Qi共Xi , t兲 = Qi+1共0 , t兲; and the gate opening Wi共t兲 The hydraulic exponents N are computed for each pool of both
canals using Eq. (37) in Appendix II, where Q1 = Qmax (corre-
Qi共Xi,t兲 = f i关Zi共Xi,t兲,Zi+1共0,t兲,Wi共t兲兴 共17兲
sponding to high flow conditions) and Q2 = Qmin (corresponding to
The water elevation Z is the addition of the water depth Y plus the low flow conditions). This leads to the values given in Table 3.
bed elevation. The hydraulic exponent enables one to compute the uniform
A classical equation for a submerged gate (orifice) is depth with Eq. (38) for any discharge Q0, once the uniform depth
376 / JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004
Table 2. Pool Parameters for ASCE Test Canal 2 is computed for a given discharge Q1. As compared with the exact
X B YX uniform depth, this method leads to a maximum relative error of
Pool (m) (m) (m) 1.33% for canal one and of 0.60% for canal two (comparison
1 7,000 7 2.1 done for discharges between Qmin and Qmax). The uniform depth
2 3,000 7 2.1 is therefore very well approximated by the hydraulic exponent
3 3,000 7 2.1 method.
4 4,000 6 1.9
5 4,000 6 1.9
IDZ Model Parameters Comparison
6 3,000 5 1.7
7 2,000 5 1.7 The IDZ model parameters (time delay ˆ d, the equivalent back-
8 2,000 5 1.7 water area Âd , p̂21⬁, and p̂22⬁) are computed for the two flow con-
ditions for each canal and compared with the theoretical values
obtained following Litrico and Fromion (2002). Results are dis-
Table 3. Hydraulic Exponents N for Both Test Canals played in Tables 4 and 5 for test canal 1 at low and high flows,
Pool Canal 1 Canal 2 respectively, and in Tables 6 and 7 for test canal 2 at low and high
1 3.90 3.52 flows, respectively.
2 3.87 3.51 The tables give for each pool the discharge Q 共m3 / s兲, the the-
3 3.83 3.50 oretical time delay d 共s兲, the approximated tune delay ˆ d 共s兲, the
4 3.95 3.54 theoretical equivalent backwater area Ad 共m2兲, the approximated
5 3.90 3.51 one Âd 共m2兲, minimum and maximum values of the gain of trans-
6 3.84 3.57 fer functions p21 and p22 at infinity, and the approximate values
7 3.95 3.53 p̂21⬁ 共sm−2兲 and p̂22⬁ 共sm−2兲.
8 3.83 3.51
Table 4. IDZ Model Parameters for ASCE Test Canal 1, Low Flow
Pool Q d ˆ d Ad Âd p21⬁ p̂21⬁ p22⬁ p̂22⬁
1 0.8 36.9 36.9 341.6 339.2 0.1300– 1.4069 0.1913 0.0295– 1.2644 0.1391
2 0.7 426.4 427.6 821.0 824.9 0.0054– 0.0087 0.0070 0.0880– 0.2039 0.2368
3 0.6 151.9 152.9 668.7 671.2 0.1092– 0.1737 0.1440 0.1014– 0.2253 0.2719
4 0.5 305.9 307.6 788.5 790.8 0.0219– 0.0343 0.0274 0.0993– 0.2214 0.2561
5 0.4 792.9 794.9 817.2 817.8 共4.2– 6.2兲 ⫻ 10−5 5.3⫻ 10−5 0.0948– 0.1967 0.2565
6 0.3 723.0 724.8 679.5 678.3 共6.1– 9.9兲 ⫻ 10−5 7.6⫻ 10−5 0.1014– 0.2631 0.2951
7 0.2 732.1 734.2 635.5 632.7 共2.5– 4.0兲 ⫻ 10−5 3.3⫻ 10−5 0.1033– 0.2534 0.3289
8 0.1 912.3 913.4 673.9 667.1 共2.5– 4.4兲 ⫻ 10−7 3.5⫻ 10−7 0.0862– 0.2691 0.3394
Table 5. IDZ Model Parameters for ASCE Test Canal 1, High Flow
Pool Q d ˆ d Ad Âd p21⬁ p̂21⬁ p22⬁ p̂22⬁
1 2.0 29.5 29.6 328.2 331.2 0.1598– 0.6165 0.2454 0.0880– 0.5698 0.1974
2 1.8 337.6 337.4 574.5 575.9 0.0168– 0.0251 0.0208 0.1311– 0.2373 0.2854
3 1.6 117.2 117.0 438.3 436.3 0.1188– 0.1760 0.1477 0.1572– 0.2793 0.3451
4 1.4 238.4 238.2 572.6 575.8 0.0387– 0.0602 0.0490 0.1281– 0.2522 0.2916
5 1.2 610.8 610.8 616.4 620.8 0.0011– 0.0016 0.0013 0.1229– 0.2479 0.2791
6 1.0 541.3 541.3 494.3 496.2 0.0018– 0.0028 0.0022 0.1502– 0.2879 0.3260
7 0.8 531.0 531.0 465.3 467.6 0.0015– 0.0024 0.0020 0.1478– 0.2868 0.3492
8 0.6 603.0 603.5 516.0 518.8 共5.6– 7.7兲 ⫻ 10−4 6.9⫻ 10−4 0.1452– 0.2501 0.3337
Table 6. IDZ Model Parameters for ASCE Test Canal 2, Low Flow
Pool Q d ˆ d Ad Âd p21⬁ p̂21⬁ p22⬁ p̂22⬁
1 2.7 1,822.6 1,821.4 82,799 83,746 0.0164– 0.0230 0.0246 0.0142– 0.0273 0.0225
2 2.5 754.6 754.4 38,199 38,247 0.0198– 0.0785 0.0260 0.0054– 0.0757 0.0204
3 2.2 757.7 757.5 38,278 38,315 0.0199– 0.0884 0.0263 0.0048– 0.0852 0.0203
4 2.0 1,073.4 1,073.0 43,607 43,767 0.0230– 0.0518 0.0302 0.0108– 0.0521 0.0254
5 1.7 1,080.0 1,079.5 43,822 43,941 0.0235– 0.0613 0.0310 0.0093– 0.0596 0.0253
6 1.5 848.8 848.7 28,481 28,560 0.0285– 0.0725 0.0370 0.0119– 0.0722 0.0308
7 1.2 564.1 564.0 19,476 19,490 0.0291– 0.1457 0.0387 0.0063– 0.1408 0.0298
8 1.0 566.9 566.8 19,514 19,523 0.0293– 0.1751 0.0392 0.0053– 0.1686 0.0297
JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004 / 377
Table 7. IDZ Model Parameters for ASCE Test Canal 2, High Flow
Pool Q d ˆ d Ad Âd p21⬁ p̂21⬁ p22⬁ p̂22⬁
1 11.0 1,577.9 1,582.8 59,703 61,245 0.0052– 0.0053 0.0061 0.0216– 0.0221 0.0240
2 10.0 681.5 682.0 33,868 34,113 0.0158– 0.0215 0.0185 0.0164– 0.0285 0.0216
3 9.0 690.4 690.9 34,630 34,891 0.0163– 0.0235 0.0195 0.0154– 0.0296 0.0214
4 8.0 952.4 953.7 35,441 35,885 0.0127– 0.0139 0.0154 0.0241– 0.0282 0.0270
5 7.0 970.3 971.9 37,029 37,598 0.0139– 0.0156 0.0177 0.0231– 0.0284 0.0268
6 6.0 753.7 754.3 23,458 23,634 0.0176– 0.0198 0.0200 0.0291– 0.0360 0.0328
7 5.0 513.6 513.8 17,718 17,809 0.0249– 0.0378 0.0291 0.0218– 0.0462 0.0314
8 4.0 526.0 526.3 18,335 18,425 0.0262– 0.0458 0.0316 0.0186– 0.0519 0.0309
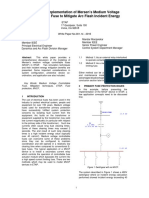
Discussion Frequency domain comparison
The proposed approximation is very good at estimating the time The proposed IDZ model of the first pool of canals one and two is
delay of the pools; the maximum relative error ed = 兩d − ˆ d兩 / d is compared in the frequency domain to the complete model ob-
equal to 0.61% for all the cases (Table 8). The approximation of tained following Litrico and Fromion (2004b) for both flow con-
the backwater area Ad is also good, since the maximum relative ditions. This is presented in Figs. 2 and 3 for test canal one and in
error eAd = 兩Ad − Âd兩 / Ad is equal to 4.03% for test canal one in high Figs. 4 and 5 for test canal two. The Bode diagrams give the
flow conditions. The backwater areas are very well estimated for magnitude of transfer functions p21共j兲 and p22共j兲 in dB (i.e.,
test canal two, because the maximum relative error is equal to 20 log10兩 · 兩) and their phase in degrees as functions of the fre-
2.56. The approximate model is able to accurately reproduce large quency in rad/s. Such a diagram enables one to evaluate the
variations of parameters under varying flow conditions. response of the system to a sinusoidal input.
These results confirm the results already obtained on two other These Bode diagrams confirm the parameters comparison done
example canals for different flow configurations (Litrico and Fro- previously, the frequency fit is accurate enough for controller de-
mion 2004a); the proposed IDZ model is very accurate at estimat- sign, and the approximate model is able to reproduce the fre-
ing time delay and equivalent backwater area. This provides a quency behavior of the system for large variations of the refer-
very good fit of the frequency response of the pool at low fre- ence discharge.
quencies. The backwater area Ad gives the magnitude of the fre- This IDZ model demonstrates a good fit, but one may wonder
quency response of the system for low frequencies, and the time if the zero is necessary and if a simple ID model would be accu-
delay d is essential to identify the limits of performance of the rate enough. This is explored in the next section, by showing the
system, i.e., the maximum achievable frequency c where pertur- impact of the zero on the time domain response of two canal
bations can be rejected. This frequency can be estimated by c pools interconnected with a gate.
⬇ 1 / d (Aström 2000; Litrico and Fromion 2001). This is the best
achievable real-time performance of the controlled system; it is Time domain comparison
not possible to reject perturbations of frequency higher than c
with distant downstream feedback control. This is a structural The model for canal dynamics is linked to the hydraulic structure
limitation, because it applies for any linear controller. as described previously, and the system response to a gate open-
The model fit in high frequencies is not as accurate as for low
frequencies. The parameter p̂21⬁ is mostly in the range
关min兩 p21 兩 , max兩 p21兩兴, which adequately captures the high fre-
quency behavior of the system. The parameter p̂22⬁ is well esti-
mated for canal two in both flow conditions, but it is slightly
overestimated for canal one. This error may be due to the fact that
test canal one is a canal where the static approximation is not very
accurate for each part of the approximated backwater curve. In
that case, the errors may accumulate with the interconnection.
The mismatch is, however, acceptable and has a limited effect on
the overall result (Tables 4 and 5).
Table 8. Maximum Relative Errors on ID Model Parameters for ASCE
Test Canals (%)
Canal Flow e d e Ad
1 Low 0.61 3.26
1 High 0.26 4.03
2 Low 0.06 1.13 Fig. 2. Bode diagram for pool 1 of test canal one, low flow condi-
2 High 0.31 2.56 tions: complete model (—) and IDZ model (– –)
378 / JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004
Fig. 3. Bode diagram for pool 1 of test canal one, high flow condi- Fig. 5. Bode diagram for pool 1 of test canal one, high flow condi-
tions: complete model (—) and IDZ model (– –) tions: complete model (—) and IDZ model (– –)
ing is simulated. Three different models for canal dynamics are IDZ model estimates much better the discharge over time. This
considered: (1) the proposed approximate IDZ model; (2) an ID shows the use of the IDZ model for time-domain simulation and
model, obtained from the IDZ model by keeping only the integra- for possible use as an internal model in an advanced controller
tor and the delay (to see the impact of the zero on the time using the gate opening as the control variable.
response); and (3) a complete linear model obtained from an ac-
curate frequency modeling of linearized Saint-Venant equations
(Litrico and Fromion 2002). Model for a Real Canal
The gate coefficients are obtained by differentiating Eq. (17).
Fig. 6 depicts q共X1 , t兲, the downstream discharge of pool one and We briefly describe the method to obtain the simplified model for
water level variations for a sudden opening of gate one of test a real canal (i.e., with complex geometry, intermediate hydraulic
canal two, in high flow conditions; y 1共X1 , t兲=water level upstream structures, etc.). The method applies directly to parts of the canal
from the gate and y 2共0 , t兲=water level downstream of the gate. pool with uniform geometry and bed slope. We assume that the
The figure clearly shows that the IDZ model reproduces more canal can be decomposed into such parts that may be separated by
accurately the time response of the system, because of the instan- fixed hydraulic structures (not used for control). If this is not the
taneous impact of the gate opening on the water levels (and on the
discharge), which is not taken into account by the ID model. In
this case, the ID model leads to a 25% overestimation of the
instantaneous discharge flowing through the gate, whereas the
Fig. 6. Time domain response for first two pools of test canal two,
high flow conditions: reaction of local discharge and water levels to
gate opening [q共X1 , t兲 = discharge at gate; y 1共X1 , t兲 = water level up-
stream of gate; and y 2共0 , t兲 = water level downstream of gate.]; com-
Fig. 4. Bode diagram for pool 1 of test canal one, low flow condi- parison between complete model (SV —), IDZ model (– –), and ID
tions: complete model (—) and IDZ model (– –) model 共. . .兲
JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004 / 379
case, the modeler needs to define homogeneous parts, with an
average slope and geometry that approximates the volume of the
considered part of the pool.
y 共1兲 冋
共1兲
0 = p̂11 +
1−
k1 p̂共1兲
k1 p̂共1兲
22
共1兲
12 p̂21
− k2 p̂共2兲
11
册 q共1兲
0 +
k2 p̂共1兲
1 − k1 p̂共1兲
共2兲
12 p̂12
共2兲
22 − k2 p̂11
q共2兲
X
共24兲
Obtaining IDZ Model Parameters
The following steps can be followed to obtain the model param-
eters for a real canal:
y 共2兲
X =
k1 p̂共1兲
1 − k1 p̂共1兲
共2兲
21 p̂21
22 − k2 p̂11
共1兲 共2兲
共2兲 q0 + p̂22 + 冋 k2 p̂共2兲
1 − k1 p̂共1兲
共2兲
21 p̂12
共2兲
22 − k2 p̂11
册 q共2兲
X
1. Decompose the canal pool into k parts with uniform geom- 共25兲
etry and bed slope, with a discharge Q共k兲 0 for each part. This is the general equations giving the simplified model for a
2. Given the downstream water elevation of the pool Y 共k兲 X , com- canal pool separated into two parts interconnected by a fixed hy-
pute the IDZ model parameters for the kth part. This leads to draulic structure. As can be deduced from Eqs. (24) and (25), the
ˆ 共k兲 ˆ 共k兲 共k兲 共k兲 共k兲
u , d , Âu , Âd , and p̂ij⬁ If k = 1, this is the upstream end
total delays can be computed directly as the sum of the partial
of the pool, and all the parameters have been obtained; else, delays, but this is not the case for the integrator gains (the equiva-
go to step 3. lent backwater areas). Indeed, the interconnected model is no
3. If there is no hydraulic structure, Y 共k−1兲 = Y 共k兲
0 ; else, use the
longer an IDZ model, because the interconnection leads to a se-
X
ries of an IDZ model and a first-order model (the transfer function
upstream water level of part k denoted by Y 共k兲 0 , the discharge is the multiplication of an IDZ model and a first-order model).
Q共k兲 , and the hydraulic structure equation to compute the
0 This is due to the fact that the hydraulic structure imposes a local
downstream water level of part k − 1; i.e., Y 共k−1兲 X . feedback between the water level and the discharge.
4. Do k : = k − 1 and go to step 2.
The overall linear dynamic system is obtained by computing Case of a Simple Interconnection
the interconnection of all IDZ models with the linearized hydrau- The same procedure can be applied in the case of two parts with
lic structures equations. We describe in the following the inter- a simple connection. Eq. (22) is here replaced by the equation
connection of two IDZ models. The interconnection can be gen-
eralized to any number of intermediate models. y 共1兲 共2兲
X = y0 共26兲
This leads to the following equation for the discharge at the in-
Computing the Interconnection terconnection:
Consider a canal pool separated into two parts with uniform ge- p̂共1兲 p̂共2兲
q共1兲 共2兲 共1兲
q共2兲
21 12
ometry and bed slope. The preceding algorithm gives IDZ model X = q0 = 共1兲 q0 − 共27兲
p̂共2兲 p̂共2兲 共1兲 X
11 − p̂22 11 − p̂22
parameters denoted by ˆ 共k兲 ˆ 共k兲 共k兲 共k兲 共k兲
u , d , Âu , Âd , and p̂ij⬁, with k = 1 for
the first upstream part and k = 2 for the downstream part. The IDZ In that case, the overall model of the complete pool is given by
model equations lead to
y 共k兲
0 = p̂共k兲 共k兲
11 共s兲q0 + p̂共k兲 共k兲
12 共s兲qX 共20兲
y 共1兲 冋
共1兲
0 = p̂11 +
p̂共1兲
p̂共2兲
11 −
共1兲
12 p̂21
p̂共1兲
22
册 q共1兲
0 −
p̂共1兲
p̂共2兲
共2兲
12 p̂12
共1兲
11 − p̂22
q共2兲
X 共28兲
y 共k兲 共k兲 共k兲 共k兲 共k兲
X = p̂21 共s兲q0 + p̂22 共s兲qX 共21兲 y 共2兲
X =
p̂共1兲
p̂共2兲
11 −
共2兲
21 p̂21
p̂共1兲
22
q共1兲
0 冋22
+ p̂共2兲 −
p̂共2兲
p̂共2兲
共2兲
21 p̂12
共1兲
11 − p̂22
册 q共2兲
X 共29兲
where k = 1 for the first upstream part and k = 2 for the second In this case, the obtained model is close to an IDZ model: the
downstream part. total delays can also be computed directly as the sum of the
partial delays, and the equivalent backwater areas are obtained
Case of a Fixed Hydraulic Structure with equations similar to Eqs. (47) and (48). Indeed, there is no
The parts are interconnected with a fixed hydraulic structure, local feedback between the water level and the discharge in this
whose linearized equation is written as case.
In both cases, the interconnection can be easily written in a
q共1兲 共2兲 共1兲 共2兲
X = q0 = k1y X + k2y 0 共22兲 computer program, leading to an automatic computation of the
model.
where y 共1兲 共2兲
X =downstream water level of part 1; and y 0 =upstream
water level of part 2. k1 ⬎ 0 and k2 ⬍ 0 are the coefficients of the
linearized structure equation (k2 = 0 for free flow). Conclusion
Interconnecting Eqs. (20) and (21) with Eq. (22) leads to the
following expression for the discharge at the interconnection (the The paper has evaluated the accuracy of a new simple model for
dependence in s is omitted for readability): an open-channel pool subject to backwater, presented by Litrico
and Fromion (2004a). This integrator-delay-zero (IDZ) model is
k1 p̂共1兲 k2 p̂共2兲 simple and models the complete transfer matrix (i.e., the down-
q共1兲 共2兲 共1兲
q共2兲
21 12
X = q0 = 共2兲 q0 +
stream influence is also taken into account). The inputs are the
1 − k1 p̂共1兲 1 − k1 p̂共1兲 共2兲 X
22 − k2 p̂11 22 − k2 p̂11 upstream and downstream discharges, and its outputs are the up-
共23兲 stream and downstream water levels.
The model has been validated in the frequency and time do-
The overall model of the complete pool (interconnection of the mains using the exact transfer matrix obtained following Litrico
two parts) is then given by and Fromion (2002) on the ASCE tests canals for both flow con-
380 / JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004
figurations. The parameters comparison has shown that the IDZ dY 0共x兲 Sb − S f0共x兲
model is able to reproduce large parameter variations due to flow = 共32兲
dx 1 − F0共x兲2
changes. The model can therefore be used in a systematic way to
design controllers for open channels. It could be included in an T0 = mirror width for the equilibrium regime (m); A0共x兲 = wetted
adaptive controller whose parameters vary with the flow. More- area 共m2兲; Q0 = reference discharge 共m3 / s兲 across section A0;
over, the frequency domain comparison has shown that the ap- V0共x兲 = average velocity 共m / s兲 in section A0 Y 0共x兲 = water depth
proximate model is accurate in a large frequency bandwidth. This (m); S f0共x兲 = friction slope; Sb = bed slope; g= gravitational ac-
has been confirmed by time-domain simulations which showed celeration 共m / s2兲; and C0 = 冑gA0 / T0 is the wave celerity 共m / s兲.
that the IDZ model provided an accurate model for the local F0 is the Froude number F0 = V0 / C0. The flow is assumed to be
behavior of the canal pool when it is operated via hydraulic struc- subcritical, i.e. F0 ⬍ 1.
tures. Finally, a procedure is given to compute the model in real- The friction slope S f0 is modeled with the Manning-Strickler
istic cases where the pools have varying geometry and bed slope, formula (Chow 1988):
or incorporate intermediate hydraulic structures.
The obtained model can be used for controller design, such as Q20n2
S f0共x兲 = 共33兲
distant downstream PI controllers, or even for advanced controller A0共x兲2R0共x兲4/3
design, such as multivariable controllers.
Where n = the roughness coefficient 共sm−1/3兲; and R0共x兲 = hydrau-
lic radius (m), defined by R0 = A0 / P0, where P0 is the wetted
perimeter (m).
Acknowledgments Taking into account Eq. (32), parameters ␥0 and 0 are ex-
pressed as
再 冎
This work was partially supported by the joint research program
INRA/Cemagref ASS AQUAE No. 02, on the control of delayed T0 Y0
hydraulic systems. ␥0 = V20 + gT0 共1 + 0兲Sb − 关1 + 0 − 共0 − 2兲F20兴
x x
共34兲
冉 冊
Notation
2g Y0
0 = − Sb − 共35兲
The following symbols are used in this paper: V0 x
Ad ⫽ downstream backwater area in m2; where 0 = 7 / 3 − 4A0 / 共3T0 P0兲 P0 / Y.
Au ⫽ upstream backwater area in m2; The boundary conditions are then given by q共0 , t兲 = q0共t兲 and
j ⫽ complex number j2 = −1; q共X , t兲 = qX共t兲.
pij共s兲 ⫽ Saint-Venant transfer functions;
pij⬁ ⫽ gains for high frequencies;
p̂ij共s兲 ⫽ approximated Saint-Venant transfer functions;
Appendix II. Computation of the Uniform Depth Yn
Q0 ⫽ steady-state discharge in m3s−1;
q ⫽ relative discharge in m3s−1;
To obtain an analytical model, it is necessary to have an analytical
s ⫽ Laplace variable in s−1;
expression for the uniform depth Y n. The uniform depth is com-
x ⫽ longitudinal abscissa in m;
puted from the solution of the algebraic equation J0 = I, with J0 the
Y 0 ⫽ steady-state water depth in m;
friction slope given by the Manning-Strickler formula, Eq. (33).
y ⫽ relative water elevation in m;
In the general case, J0 is not a simple function of Y 0; therefore,
d ⫽ time delay for downstream propagation in s;
there is no analytical solution of this equation. The hydraulic
u ⫽ time delay for upstream propagation in s; and
exponent method (Chow 1988) enables one to obtain a good ana-
⫽ frequency in rad/s.
lytical approximation of the uniform depth in prismatic channels.
In this method, the conveyance K0 = Q0 / 冑J0 is assumed to be a
power function of the depth of flow Y 0:
Appendix I. Linearized Saint-Venant Model
K20 = CY N0 共36兲
For a prismatic channel, linearized Saint-Venant equations around
a given steady flow regime (including backwater curves) are where C is a coefficient; and N=hydraulic exponent for uniform
given by the following equations (Litrico and Fromion 2004b), flow computation.
where the values of parameters for the steady-state regime are A good approximation of N is obtained by computing the uni-
denoted with an underscored zero: form depth for two different discharges Q1 and Q2. N is then
given by
y q
T0共x兲 + =0 共30兲 log共Q1/Q2兲
t x N=2 共37兲
log关Y n共Q1兲/Y n共Q2兲兴
q q y Given the uniform flow depth Y n共Q1兲 corresponding to a dis-
+ 2V0共x兲 − 0共x兲q + 关C0共x兲2 − V0共x兲2兴T0共x兲 − ␥0共x兲y = 0
t x x charge Q1 (e.g., the maximum discharge for the considered pool),
共31兲 the value of the uniform flow depth Y n共Q0兲 for another discharge
Q0 can be approximated by
冉 冊
where y = Y − Y 0 is the variation of water depth (m); and q = Q 2/N
− Q0 is the variation of flow rate 共m3 / s兲 from the steady-state Q0
Y n共Q0兲 ⬇ Y n共Q1兲 共38兲
regime, defined by Q1
JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004 / 381
Appendix III. Backwater Curve Approximation
Au =
␥0
关
T20共C20 − V20兲 ␥ T 共C2−V2兲x
e 0Ⲑ 0 0 0 − 1 兴 共50兲
Using the backwater curve definition given by Eq. (32), let SX
denote the deviation from bed slope of the line tangent to the and the variables are evaluated at 0, and where x = x1. For the
backwater curve at the downstream end of the pool downstream backwater part, Āu and Ād are given by the same
equations [Eqs. (49) and (50)], where the variables are evaluated
Sb − S f0共X兲 at x2 = 共x1 + X兲 / 2 and where x = X − x1.
SX = 共39兲
1 − F20共X兲 The equivalent delays are given by
Then, the intersection between the two lines occurs at abscissa x1 ˆ u = u + ¯u 共51兲
冦 再 冎
YX − Yn ˆ d = d + ¯d 共52兲
max X − ,0 if SX ⫽ 0
x1 = SX 共40兲 with
X if SX = 0
x1
Then, the approximate backwater curve satisfies the equation d = 共53兲
C0共0兲 + V0共0兲
Ỹ共x兲 = 再 Y1 for x 苸 关0,x1兴
Y 1 + 共x − x1兲Sb for x 苸 关x1,X兴
共41兲
u =
x1
C0共0兲 − V0共0兲
共54兲
with
and
Y1 = 再 Yn if x1 ⫽ 0
Y X − XSX if x1 = 0
共42兲 ¯d =
X − x1
V0共x2兲 + C0共x2兲
共55兲
Here, Y 1 = Y n when part of the pool is in uniform flow, and when
the whole pool is affected by backwater, Y 1 = Y X − XSX; i.e., the X − x1
¯u = 共56兲
water level is a straight line of slope SX. C0共x2兲 − V0共x2兲
The gains in high frequencies are given by
p12⬁ p21⬁
Appendix IV. Approximate Model p̂11⬁ = p11⬁ + 共57兲
p̄11⬁ + p22⬁
The global model is, therefore, given by (Litrico and Fromion
2004a) p12⬁ p̄12⬁
p̂12⬁ = 共58兲
1 p̄11⬁ + p22⬁
p̂11共s兲 = + p̂11⬁ 共43兲
Âus
p21⬁ p̄21⬁
共59兲
冉 冊
p̂21⬁ =
1 p̄11⬁ + p22⬁
p̂12共s兲 = − + p̂12⬁ e −ˆ us
共44兲
Âus p̄12⬁ p̄21⬁
p̂22⬁ = p̄22⬁ + 共60兲
冉 冊
p̄11⬁ + p22⬁
1
p̂21共s兲 = + p̂21⬁ e−ˆ ds 共45兲 The parameters pij⬁ are obtained by the following equations:
冑
Âds
p̂22共s兲 = −
1
− p̂22⬁ 共46兲 p11⬁ =
1
1+ 冉 冊
1 − F0 2 ␣x
1 + F0
e
共61兲
Âds T0C0共1 − F0兲 1 + e␣x
with the equivalent areas ␥0
e− 2T0共C20−V20兲 x
冉 冊
2
p12⬁ = 共62兲
Āu T0C0共1 − F20兲 冑1 + e␣x
Âu = Au 1 + 共47兲
Ad
e␥0 Ⲑ 2T0共C0−V0兲x
2 2
2
冉 冊
p21⬁ = 共63兲
Ad T0C0共1 − F20兲 冑1 + e␣x
Âd = Ād 1 + 共48兲
冑 冉 冊
Āu
1 + F0 2 ␣x
where, for the upstream uniform flow part 1+ e
1 1 − F0
p22⬁ = 共64兲
T0C0共1 + F0兲 1 + e␣x
Ad =
T20共C20
␥0
− V20兲
关1 − Ⲑ 2
e−␥0 T0共C0−V0兲x
2
兴 共49兲
where, in the upstream uniform part:
382 / JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004
T0关2 + 共0 − 1兲F20兴Sb Hancu, S., and Dan, P. (1992). “Wave-motion stability in canals with
␣= 共65兲 automatic controllers.” J. Hydraul. Eng., 118(12), 1621–1638.
A0F0共1 − F20兲 Litrico, X., and Fromion, V. (2001). “About optimal performance and
and x = x1. In the downstream backwater part, the same expres- approximation of open-channel hydraulic systems.” Proc., 40th Conf.
sions are valid, replacing x with x̄ = X − x1 , ␣ with on Decision and Control, 4511–4516, IEEE, Piscataway, N.J.
再 冋
Litrico, X., and Fromion, V. (2002). “Infinite dimensional modelling of
T0 open-channel hydraulic systems for control purposes.” Proc. 41st
¯␣ = 关2 + 共0 − 1兲F20兴Sb − 2 + 共0 − 1兲F20
A0F0共1 − F20兲 Conf. on Decision and Control, 1681–1686.
− 冉 A0 dT0
T20 dY
冊册
+ 0 − 2 F40 SX 冎 共66兲
Litrico, X., and Fromion, V. (2004). “Analytical approximation of open-
channel flow for controller design.” Appl. Math. Model., 28(7), 677-
395.
Litrico, X., and Fromion, V. (2004). “Frequency modeling of open chan-
and all the variables with their values taken at x2 = 共x1 + X兲 / 2. nel flow.” J. Hydraul. Eng., 130(8), 806–815.
Litrico, X., Fromion, V., Baume, J.-P., and Rijo, M. (2003). “Modelling
and PI controller design for an irrigation canal.” Proc., European
References Control Conf., Cambridge, IEE, London.
Litrico, X., and Georges, D. (1999). “Robust continuous-time and
Aström, K. (2000). “Limitations on control system performance.” Eur. J. discrete-time flow control of a dam-river system. I: Modelling.” Appl.
Control, 6, 1–19. Math. Model., 23(11), 809–827.
Balogun, O. (1985). “Design of real-time feedback control for canal sys- Malaterre, P.-O. (1998). “PILOTE: linear quadratic optimal controller for
tems using linear quadratic regulator theory.” PhD thesis, Dept. of irrigation canals.” J. Irrig. Drain. Eng., 124(4), 187–194.
Mechanical Engineering, Univ. of California, Davis., Calif. Rogier, D., Coeuret, C., and Brémond, J. (1987). “Dynamic regulation on
Chow, V. (1988). Open-channel hydraulics, McGraw-Hill, New York. the Canal de Provence.” Proc. ASCE Symposium, ASCE, New York,
Clemmens, A. J., Kacerek, T. F., Grawitz, B., and Schuurmans, W. 180–200.
(1998). “Test cases for canal control algorithms.” J. Irrig. Drain. Schuurmans, J., Clemmens, A. J., Dijkstra, S., Hof, A., and Brouwer, R.
Eng., 124 (1), 23–30. (1999a). “Modeling of irrigation and drainage canals for controller
Corriga, G., Patta, F., Sanna, S., and Usai, G. (1979). “A mathematical design.” J. Irrig. Drain. Eng., 125 (6), 338–344.
model for open-channel networks.” Appl. Math. Model., 3, 51–54. Schuurmans, J., Hof, A., Dijkstra, S., Bosgra, O. H., and Brouwer, R.
Corriga, G., Salembeni, D., Sanna, S., and Usai, G. (1988). “A control (1999b). “Simple water level controller for irrigation and drainage
method for speeding up response of hydroelectric stations power ca- canals.” J. Irrig. Drain. Eng., 125(4), 189–195.
nals.” Appl. Math. Model., 12, 627–633. Shand, M. (1971). “Automatic downstream control systems for irrigation
Deltour, J.-L. (1995). “The Canal de Provence dynamic regulation sys- canals.” PhD thesis, Univ. of California, Berkeley, Calif.
tem: a safe and suitable process for operating water conveyance struc- Strelkoff, T. S., Deltour, J. L., Burt, C. M., Clemmens, A. J., and Baume,
tures.” Proc., 1st Int. Conf. on Water Resources Engineering, ASCE, J. P. (1998). “Influence of canal geometry and dynamics on control-
New York, 56–60. lability.” J. Irrig. Drain. Eng., 124(1), 16–22.
Ermolin, Y. (1992). “Study of open-channel dynamics as controlled pro- Zhou, K., and Doyle, J. (1998). Essentials of robust control, Prentice-
cess.” J. Hydraul. Eng., 118(1), 59–72. Hall, Upper Saddle River, N.J.
JOURNAL OF IRRIGATION AND DRAINAGE ENGINEERING © ASCE / SEPTEMBER/OCTOBER 2004 / 383
S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- BSP - Bhrigu Saral PaddathiDocument2 paginiBSP - Bhrigu Saral PaddathiS K Mishra0% (1)
- RTD Studies in CSTRDocument6 paginiRTD Studies in CSTRsri pragnaÎncă nu există evaluări
- Spinkler Calculation AnkurDocument12 paginiSpinkler Calculation AnkurankurÎncă nu există evaluări
- Lab 02 Force FieldDocument10 paginiLab 02 Force FieldAjeet Singh100% (1)
- Company Profile (Update Feb 2018) PDFDocument26 paginiCompany Profile (Update Feb 2018) PDFKhairul Amri PutraÎncă nu există evaluări
- Shahin Internship Report On Non-Destructive Testing in Saj Engineering and Trading CompanyDocument127 paginiShahin Internship Report On Non-Destructive Testing in Saj Engineering and Trading CompanyShahin Manjurul AlamÎncă nu există evaluări
- Complexity Decision-Making and Requisite Variety Remington and PollackDocument13 paginiComplexity Decision-Making and Requisite Variety Remington and Pollackbuenmarg100% (1)
- IRC 110-2005 Standard Specifications and Code of Practice For Design and Construction of Surface DressingDocument28 paginiIRC 110-2005 Standard Specifications and Code of Practice For Design and Construction of Surface DressingPrasanna S Kulkarni0% (1)
- Chaos and Systems TheoryDocument17 paginiChaos and Systems TheoryBrian Futterman100% (2)
- Introduction To Piping Engineering PDFDocument0 paginiIntroduction To Piping Engineering PDFReaderRRGHTÎncă nu există evaluări
- IG.24.Alluvial and Black Soil PDFDocument6 paginiIG.24.Alluvial and Black Soil PDFVikash AgarwalÎncă nu există evaluări
- Insights PT 2018 Exclusive Updated Module Part 1Document67 paginiInsights PT 2018 Exclusive Updated Module Part 1superman_universeÎncă nu există evaluări
- ESurvey ManualDocument21 paginiESurvey ManualprakashÎncă nu există evaluări
- Insights PT 2018 Exclusive CorrectionsDocument3 paginiInsights PT 2018 Exclusive CorrectionsnikitatayaÎncă nu există evaluări
- CH 11Document5 paginiCH 11anil.gelra5140Încă nu există evaluări
- Insights PT 2018 Exclusive: PolityDocument55 paginiInsights PT 2018 Exclusive: PolityThejeswarÎncă nu există evaluări
- Current Affairs Classes For Prelims 2019Document2 paginiCurrent Affairs Classes For Prelims 2019Vikash AgarwalÎncă nu există evaluări
- JJH CM Review - Purnea Division FinalDocument40 paginiJJH CM Review - Purnea Division FinalVikash AgarwalÎncă nu există evaluări
- STAAD PRO - Wind Loading - Structural SolutionsDocument6 paginiSTAAD PRO - Wind Loading - Structural SolutionsVikash AgarwalÎncă nu există evaluări
- JJH 11.01.2020Document5 paginiJJH 11.01.2020Vikash AgarwalÎncă nu există evaluări
- Final Joint Order Chhat Puja 2019Document32 paginiFinal Joint Order Chhat Puja 2019Vikash AgarwalÎncă nu există evaluări
- Latest Govt Jobs Aug 2019Document11 paginiLatest Govt Jobs Aug 2019prashanthÎncă nu există evaluări
- J&K PPT MainDocument33 paginiJ&K PPT Mainncv100% (1)
- Kharif Khatiyani KasbaDocument5 paginiKharif Khatiyani KasbaVikash AgarwalÎncă nu există evaluări
- Corona Safety PDFDocument17 paginiCorona Safety PDFVikash AgarwalÎncă nu există evaluări
- Receipt Amin KasbaDocument1 paginăReceipt Amin KasbaVikash AgarwalÎncă nu există evaluări
- Kasba Dakhil Kharij Letter 2Document1 paginăKasba Dakhil Kharij Letter 2Vikash AgarwalÎncă nu există evaluări
- How To Install Windows 7 From Pen DriveDocument7 paginiHow To Install Windows 7 From Pen DriveVikash AgarwalÎncă nu există evaluări
- Land Acquisition Map ManjheliDocument1 paginăLand Acquisition Map ManjheliVikash AgarwalÎncă nu există evaluări
- Gauge Register KD 61 PDFDocument1 paginăGauge Register KD 61 PDFVikash AgarwalÎncă nu există evaluări
- प्रपत्र 3 एवं 4Document2 paginiप्रपत्र 3 एवं 4Vikash AgarwalÎncă nu există evaluări
- CSC e-GovPR PDFDocument1 paginăCSC e-GovPR PDFVikash AgarwalÎncă nu există evaluări
- अवकाश नियम PDFDocument7 paginiअवकाश नियम PDFVikash AgarwalÎncă nu există evaluări
- CSC e-GovPRDocument1 paginăCSC e-GovPRVikash AgarwalÎncă nu există evaluări
- 442070Document2 pagini442070Vikash AgarwalÎncă nu există evaluări
- Dabok Planning-Model PDFDocument1 paginăDabok Planning-Model PDFVikash AgarwalÎncă nu există evaluări
- CN 01 19 08 2019Document2 paginiCN 01 19 08 2019Vikash AgarwalÎncă nu există evaluări
- DM Madam Order - Poshan Mela 2019Document4 paginiDM Madam Order - Poshan Mela 2019Vikash AgarwalÎncă nu există evaluări
- CN 01 05 06 2018Document4 paginiCN 01 05 06 2018Vikash AgarwalÎncă nu există evaluări
- Los Alamos: KIVA-II: A Computer Program For Chemically Reactive Flows With SpraysDocument163 paginiLos Alamos: KIVA-II: A Computer Program For Chemically Reactive Flows With Spraysmfontenot29Încă nu există evaluări
- The Rheology of Dilute Solutions of Flexible PolymersDocument71 paginiThe Rheology of Dilute Solutions of Flexible PolymersGiorgos PapadopoulosÎncă nu există evaluări
- Chapter 38 Magnetism and Electromagnetism: EXERCISE 177, Page 401Document5 paginiChapter 38 Magnetism and Electromagnetism: EXERCISE 177, Page 401RickyÎncă nu există evaluări
- EnthalpyDocument16 paginiEnthalpyMazen AliÎncă nu există evaluări
- Pipeline BibliographyDocument23 paginiPipeline BibliographySiva KumarÎncă nu există evaluări
- Molecular Energy Levels NotesDocument5 paginiMolecular Energy Levels Notesskrim2Încă nu există evaluări
- Final Protocol SuspensionDocument8 paginiFinal Protocol SuspensionCharleen Joyce UsacdinÎncă nu există evaluări
- 2010 YJC H2 Phy Paper1 QN AnsDocument21 pagini2010 YJC H2 Phy Paper1 QN AnscjcsucksÎncă nu există evaluări
- Revision Notes - Unit 2 AQA Physics A-LevelDocument12 paginiRevision Notes - Unit 2 AQA Physics A-LevelElliot ThomasÎncă nu există evaluări
- An Introduction To Physical Theory of Molecular Evolution: Bartolo LuqueDocument40 paginiAn Introduction To Physical Theory of Molecular Evolution: Bartolo LuquePedro HidalgoÎncă nu există evaluări
- Rapid Determination of Benzalkonium Chloride in A Cosmetic: Key WordsDocument4 paginiRapid Determination of Benzalkonium Chloride in A Cosmetic: Key WordsYolby Milena Rodriguez ArizaÎncă nu există evaluări
- Lateral Stiffness Characteristics of Tall PDFDocument19 paginiLateral Stiffness Characteristics of Tall PDFLaila Monteiro A MeloÎncă nu există evaluări
- Sediment Transport in Mountain Rivers: Christophe Ancey, Patricio Bohorquez, and Eric BardouDocument16 paginiSediment Transport in Mountain Rivers: Christophe Ancey, Patricio Bohorquez, and Eric BardouomeaveÎncă nu există evaluări
- DifferentialEquations 02 Strain Disp Eqns 2Document8 paginiDifferentialEquations 02 Strain Disp Eqns 2lipun12ka4Încă nu există evaluări
- A Novel Approach (Scoring System) For Integrating Dissolved Gas Analysis Results Into A Life Management SystemDocument8 paginiA Novel Approach (Scoring System) For Integrating Dissolved Gas Analysis Results Into A Life Management Systembaby MaÎncă nu există evaluări
- Chapter 5 Periodic Classification of ElementsDocument9 paginiChapter 5 Periodic Classification of ElementsasuhassÎncă nu există evaluări
- Problems and Solutions To The MIChO Selection Camp 2015: Third PhaseDocument38 paginiProblems and Solutions To The MIChO Selection Camp 2015: Third PhaseYau Ching Koon100% (1)
- 02 Mirski Czudak-Fem Used For Strength-Related Calculations of Adhesive Joints in The Making of Rail Vehicles PDFDocument9 pagini02 Mirski Czudak-Fem Used For Strength-Related Calculations of Adhesive Joints in The Making of Rail Vehicles PDFAbhey DograÎncă nu există evaluări
- Fuse CalculationDocument5 paginiFuse CalculationVishnu ShankerÎncă nu există evaluări
- AMI - Moisture IndicatorsDocument2 paginiAMI - Moisture IndicatorssalamrefighÎncă nu există evaluări
- Brochure SORTEX Ricesorting EN 001 PDFDocument12 paginiBrochure SORTEX Ricesorting EN 001 PDFdan_alpa5Încă nu există evaluări