S-ar putea să vă placă și
- A Connection Between Score MatchingDocument13 paginiA Connection Between Score MatchingPixel DinosaurÎncă nu există evaluări
- A Connection Between Score Matching and Denoising AutoencodersDocument14 paginiA Connection Between Score Matching and Denoising AutoencodersalekthieryÎncă nu există evaluări
- K-Means Clustering Algorithm and Its Improvement RDocument6 paginiK-Means Clustering Algorithm and Its Improvement REdwardÎncă nu există evaluări
- Inference in The Stochastic Cox-Ingersol-Ross DiffDocument6 paginiInference in The Stochastic Cox-Ingersol-Ross DiffLý Nguyễn Kỳ DuyênÎncă nu există evaluări
- Dupiere Discrete ModelDocument14 paginiDupiere Discrete Modelabhiu1991Încă nu există evaluări
- Reinforcement Learning Based Scheduling Algorithm For Optimizing Age of Information in Ultra Reliable Low Latency NetworksDocument6 paginiReinforcement Learning Based Scheduling Algorithm For Optimizing Age of Information in Ultra Reliable Low Latency NetworksMuhammad Nadeem AliÎncă nu există evaluări
- Ass 1Document3 paginiAss 1Vibhanshu LodhiÎncă nu există evaluări
- HW 3Document7 paginiHW 3BenÎncă nu există evaluări
- Improved K-Means Algorithm Based On The: Clustering Reliability AnalysisDocument8 paginiImproved K-Means Algorithm Based On The: Clustering Reliability AnalysisDavid MorenoÎncă nu există evaluări
- Ss-KmeanDocument16 paginiSs-KmeanHaythem MzoughiÎncă nu există evaluări
- STAD70 Statistics & Finance II: Assignment 2Document3 paginiSTAD70 Statistics & Finance II: Assignment 2scribdllÎncă nu există evaluări
- Assignment 1Document2 paginiAssignment 1kfcsh5cbrcÎncă nu există evaluări
- Database Friendly Random ProjectionsDocument8 paginiDatabase Friendly Random ProjectionsSimon SouthernÎncă nu există evaluări
- Hartigans Method K-Means Clustering Without VoronDocument9 paginiHartigans Method K-Means Clustering Without VoronAlineRolimÎncă nu există evaluări
- Output) ) : 1.8 Empirical Results and Implementations 21Document2 paginiOutput) ) : 1.8 Empirical Results and Implementations 21rotero_pujolÎncă nu există evaluări
- Arima 4 2011-12Document16 paginiArima 4 2011-12Jairo Valverde ReyesÎncă nu există evaluări
- Improved K-Nearest Neighbor Classi"cation: Yingquan Wu, Krassimir Ianakiev, Venu GovindarajuDocument8 paginiImproved K-Nearest Neighbor Classi"cation: Yingquan Wu, Krassimir Ianakiev, Venu GovindarajuTaca RosaÎncă nu există evaluări
- The Study of Different Types of Kernel Density Estimators: Minge Sha, Yonggang XieDocument5 paginiThe Study of Different Types of Kernel Density Estimators: Minge Sha, Yonggang Xie朱俊曉Încă nu există evaluări
- Hamiltonian Quantized Gossip: Mauro Franceschelli, Alessandro Giua, Carla SeatzuDocument15 paginiHamiltonian Quantized Gossip: Mauro Franceschelli, Alessandro Giua, Carla SeatzuEvariste OuattaraÎncă nu există evaluări
- ECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EDocument1 paginăECM3711 - Nonlinear Systems and Control: M¨ δ P − D ˙δ − η E τ ˙ E EMuhammad Sohaib ShahidÎncă nu există evaluări
- Problem - A - CodeforcesDocument1 paginăProblem - A - Codeforcesawei0420Încă nu există evaluări
- Autocovariance Least Square Method For Estimating Noise CovariancesDocument6 paginiAutocovariance Least Square Method For Estimating Noise Covariancesnadamau22633Încă nu există evaluări
- A New Spectral Conjugate Gradient Algorithm For Unconstrained OptimizationDocument10 paginiA New Spectral Conjugate Gradient Algorithm For Unconstrained OptimizationTJPRC PublicationsÎncă nu există evaluări
- Vmls Additional ExercisesDocument66 paginiVmls Additional ExercisesmarcosilvasegoviaÎncă nu există evaluări
- Tibshinari The Lasso Method For Variable Selection in The Cox ModelDocument11 paginiTibshinari The Lasso Method For Variable Selection in The Cox ModelMELINA PERESSINI ALVAREZÎncă nu există evaluări
- Multi-Response Optimization of Ball-End Milling Parameters Using The Taguchi-Based Grey Relational AnalysisDocument4 paginiMulti-Response Optimization of Ball-End Milling Parameters Using The Taguchi-Based Grey Relational AnalysisAnushree VinuÎncă nu există evaluări
- Recursive Decomposition For Nonconvex Optimization SuplimentDocument4 paginiRecursive Decomposition For Nonconvex Optimization SuplimentLeeÎncă nu există evaluări
- Stein Variational Gradient Descent: Many-Particle and Long-Time AsymptoticsDocument25 paginiStein Variational Gradient Descent: Many-Particle and Long-Time AsymptoticsAlex LeviyevÎncă nu există evaluări
- Canzano Et Al 2012 Use and Misuse of Sorption Kinetic Data A Common Mistake That Should Be AvoidedDocument9 paginiCanzano Et Al 2012 Use and Misuse of Sorption Kinetic Data A Common Mistake That Should Be AvoidedPhúc Nguyễn BáÎncă nu există evaluări
- Handout 1. Introduction: January 7, 2011Document183 paginiHandout 1. Introduction: January 7, 2011Gaurav YadavÎncă nu există evaluări
- SWIFT: Scalable Wasserstein Factorization For Sparse Nonnegative TensorsDocument25 paginiSWIFT: Scalable Wasserstein Factorization For Sparse Nonnegative TensorsIndir JaganjacÎncă nu există evaluări
- The Inertial Relaxed Algorithm With Armijo-Type Line Search For Solving Multiple-Sets Split Feasibility ProblemDocument18 paginiThe Inertial Relaxed Algorithm With Armijo-Type Line Search For Solving Multiple-Sets Split Feasibility ProblemCarlos TavaresÎncă nu există evaluări
- University of Edinburgh College of Science and Engineering School of InformaticsDocument5 paginiUniversity of Edinburgh College of Science and Engineering School of InformaticsfusionÎncă nu există evaluări
- Michael Parkinson PDFDocument6 paginiMichael Parkinson PDFPepeÎncă nu există evaluări
- A00 Final PracticeDocument4 paginiA00 Final PracticeTalha EtnerÎncă nu există evaluări
- Variatinal Quantum Algorithms Lesson 3Document24 paginiVariatinal Quantum Algorithms Lesson 3Ernesto CamposÎncă nu există evaluări
- Algorithmic Fluid ImageryDocument8 paginiAlgorithmic Fluid ImageryMark StockÎncă nu există evaluări
- 1 Uncertainty RelationDocument7 pagini1 Uncertainty Relationranjana senguptaÎncă nu există evaluări
- Gaussian Mixture Model: P (X - Y) P (Y - X) P (X)Document3 paginiGaussian Mixture Model: P (X - Y) P (Y - X) P (X)Kishore Kumar DasÎncă nu există evaluări
- Optimally Rotation-Equivariant DirectionalDocument8 paginiOptimally Rotation-Equivariant DirectionalEloisa PotrichÎncă nu există evaluări
- On Parameter Estimation by Nonlinear Least Squares in Some Special Two-Parameter Exponential Type ModelsDocument7 paginiOn Parameter Estimation by Nonlinear Least Squares in Some Special Two-Parameter Exponential Type ModelsKiros FisehaÎncă nu există evaluări
- Low-Complexity Iterative Sinusoidal Parameter EstimationDocument8 paginiLow-Complexity Iterative Sinusoidal Parameter EstimationPritam YaduvanshiÎncă nu există evaluări
- The Particleincell MethodDocument29 paginiThe Particleincell MethodAntonio JuarezÎncă nu există evaluări
- Optimal Interval Clustering: Application To Bregman Clustering and Statistical Mixture LearningDocument10 paginiOptimal Interval Clustering: Application To Bregman Clustering and Statistical Mixture LearningMaría del Carmen ContrerasÎncă nu există evaluări
- Discrimination and Calibration by Terry TherneauDocument6 paginiDiscrimination and Calibration by Terry TherneauBenke HargitaiÎncă nu există evaluări
- 1 s2.0 S0096300317306641 MainDocument9 pagini1 s2.0 S0096300317306641 MainChang YuÎncă nu există evaluări
- Spatial Interpolation of Rainfall Based On DEM: January 2009Document6 paginiSpatial Interpolation of Rainfall Based On DEM: January 2009ska51Încă nu există evaluări
- Continuous Time Pension Fund ModellingDocument16 paginiContinuous Time Pension Fund ModellingsssskkkkllllÎncă nu există evaluări
- Paper Financas QuantitativasDocument28 paginiPaper Financas Quantitativasjoaogui.queiroz08Încă nu există evaluări
- The Metropolis Sampling Algorithm: 1.1 Computer GraphicsDocument10 paginiThe Metropolis Sampling Algorithm: 1.1 Computer GraphicspostscriptÎncă nu există evaluări
- Efficient Classical Simulation of Slightly Entangled Quantum ComputationsDocument4 paginiEfficient Classical Simulation of Slightly Entangled Quantum ComputationsDebabrata DeyÎncă nu există evaluări
- Sparse Regression and Dictionary LearningDocument14 paginiSparse Regression and Dictionary LearningmamurtazaÎncă nu există evaluări
- BolognaniZampieri NECSYS2010Document8 paginiBolognaniZampieri NECSYS2010truatÎncă nu există evaluări
- General Instructions: Pie Matlab Assessment For Chemical EngineersDocument6 paginiGeneral Instructions: Pie Matlab Assessment For Chemical EngineersJulia RodriguezÎncă nu există evaluări
- Existenceuniqueness and Nonexistence of SolutionsDocument10 paginiExistenceuniqueness and Nonexistence of SolutionsChương Quách VănÎncă nu există evaluări
- Mixed Spectra For Stable Signals From Discrete ObservationsDocument24 paginiMixed Spectra For Stable Signals From Discrete ObservationssipijÎncă nu există evaluări
- Kelly Portfolio OptimizationDocument19 paginiKelly Portfolio OptimizationRiccardo RoncoÎncă nu există evaluări
- Inference of Generalized Pareto Parameters Under Joint Two Sample Progressive Type - II Censoring SchemeDocument12 paginiInference of Generalized Pareto Parameters Under Joint Two Sample Progressive Type - II Censoring Schemeehab aliÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)De la EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)Încă nu există evaluări
- MGT619 Final Project Report Hammad (Final)Document33 paginiMGT619 Final Project Report Hammad (Final)Hammad KhalidÎncă nu există evaluări
- Interventional Studies 2Document28 paginiInterventional Studies 2Abdul RazzakÎncă nu există evaluări
- Action ResearchDocument11 paginiAction ResearchErica Joi Flores BiscochoÎncă nu există evaluări
- Planning Theory-2019Document23 paginiPlanning Theory-2019Sanjay KumarÎncă nu există evaluări
- Jack-In Pile On Weathered GraniteDocument4 paginiJack-In Pile On Weathered GraniteShamsul Bahrin SulaimanÎncă nu există evaluări
- BaddiDocument22 paginiBaddiraj.kajaniya60% (5)
- W10 Anova Dua HalaDocument50 paginiW10 Anova Dua HalaAnonymous hHT0iOyQAzÎncă nu există evaluări
- A Study of Users' Satisfaction With Library Use Instruction and Reprographic Services in University Libraries in South-South, NigeriaDocument14 paginiA Study of Users' Satisfaction With Library Use Instruction and Reprographic Services in University Libraries in South-South, NigeriaImpact JournalsÎncă nu există evaluări
- MBA Strategic Management Syllabus 10fDocument12 paginiMBA Strategic Management Syllabus 10fnimeshbmehta5140% (1)
- Mgsu MaDocument11 paginiMgsu Majagjeet singhÎncă nu există evaluări
- Geriatric Care TreatmentDocument332 paginiGeriatric Care TreatmentHamss Ahmed100% (1)
- Factors of Undecidability in Career Choices of Grade 11 General Academic Track Students. Basis For Career Decision-Making ProgramDocument8 paginiFactors of Undecidability in Career Choices of Grade 11 General Academic Track Students. Basis For Career Decision-Making ProgramSabrina Duff OcampoÎncă nu există evaluări
- Example Outline For Term PaperDocument6 paginiExample Outline For Term Paperea4c954q100% (1)
- Solutions ManualDocument73 paginiSolutions ManualGustavo DavidÎncă nu există evaluări
- Presentation UDE 2018Document27 paginiPresentation UDE 2018Alemayehu Eyasu TedlaÎncă nu există evaluări
- Quality Control Volume 1Document182 paginiQuality Control Volume 1Saravnan Rajendran100% (3)
- Rubrics EvaluationDocument4 paginiRubrics EvaluationMuhammad Aiman Md NorÎncă nu există evaluări
- Cadburry and OgilvyDocument19 paginiCadburry and OgilvyVishrut SharmaÎncă nu există evaluări
- Statistics Exercises Chapter 2: Descriptive StatisticsDocument4 paginiStatistics Exercises Chapter 2: Descriptive StatisticsPhanna MongÎncă nu există evaluări
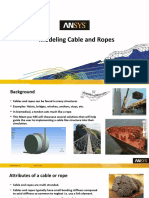
- Modelling Cables and RopesDocument14 paginiModelling Cables and RopesAjivakkom Vivekanandan50% (2)
- Ieee Gold BbokDocument1 paginăIeee Gold BbokRafi MuhammedÎncă nu există evaluări
- 2016CFA一级强化班 数量Document313 pagini2016CFA一级强化班 数量Mario XieÎncă nu există evaluări
- Human Resource Management: Job RotationDocument19 paginiHuman Resource Management: Job RotationPreeti SharmaÎncă nu există evaluări
- Widget CompanyDocument6 paginiWidget CompanyPhilipp A IslaÎncă nu există evaluări
- JEMI Vol19 Issue1 2023Document199 paginiJEMI Vol19 Issue1 2023Aubin DiffoÎncă nu există evaluări
- Case Study 1 - Choosing A New Director of ResearchDocument2 paginiCase Study 1 - Choosing A New Director of Researchbhushan_j_shetty67% (6)
- Understanding Culture, Society and PoliticsDocument24 paginiUnderstanding Culture, Society and PoliticsCherry ChanelÎncă nu există evaluări
- Community Language LearningDocument19 paginiCommunity Language LearningfullhausÎncă nu există evaluări
- Sociology: PAPER 1 Principles and Methods 1Document2 paginiSociology: PAPER 1 Principles and Methods 1bahadoor22i5583Încă nu există evaluări
- Rahul Final PPT NDPLDocument26 paginiRahul Final PPT NDPLRahul AgariayaÎncă nu există evaluări