S-ar putea să vă placă și
- A-level Maths Revision: Cheeky Revision ShortcutsDe la EverandA-level Maths Revision: Cheeky Revision ShortcutsEvaluare: 3.5 din 5 stele3.5/5 (8)
- Graphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")De la EverandGraphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Evaluare: 4 din 5 stele4/5 (2)
- DO 178 B Brief NotesDocument18 paginiDO 178 B Brief NotesMani Shankar PrasadÎncă nu există evaluări
- Heat Rate Calc in ExcelDocument13 paginiHeat Rate Calc in ExcelMukesh VadaliaÎncă nu există evaluări
- Renovation Modernization and Uprating of Hydro Power StationsDocument5 paginiRenovation Modernization and Uprating of Hydro Power StationsAbhijeet SinghÎncă nu există evaluări
- Mitsubishi Electric Product OverviewDocument116 paginiMitsubishi Electric Product OverviewPepes HiuuÎncă nu există evaluări
- LRT JakproDocument21 paginiLRT JakproAzzah Auliya Ardindasari100% (1)
- Matlab Training - Basic Control TheoryDocument10 paginiMatlab Training - Basic Control TheoryhamedÎncă nu există evaluări
- Modal AnalysisDocument14 paginiModal Analysismichael_r_reid652Încă nu există evaluări
- Lecture 5&6Document24 paginiLecture 5&6elneelÎncă nu există evaluări
- A Mathematical Model For Enzyme Kinetics: Multiple Timescales AnalysisDocument9 paginiA Mathematical Model For Enzyme Kinetics: Multiple Timescales AnalysisMaria AnghelacheÎncă nu există evaluări
- ELEC4632 - Lab - 01 - 2022 v1Document13 paginiELEC4632 - Lab - 01 - 2022 v1wwwwwhfzzÎncă nu există evaluări
- Discrete Time Observers and LQG Control: Massachusetts Institute of Technology 2.151 Advanced System Dynamics and ControlDocument8 paginiDiscrete Time Observers and LQG Control: Massachusetts Institute of Technology 2.151 Advanced System Dynamics and ControldanyetnÎncă nu există evaluări
- Bounds in EM InversionDocument5 paginiBounds in EM InversionClarisse FernandesÎncă nu există evaluări
- Sway ControlDocument27 paginiSway Controlmollmul2829Încă nu există evaluări
- ENGR 6925: Automatic Control Engineering Supplementary Notes On ModellingDocument31 paginiENGR 6925: Automatic Control Engineering Supplementary Notes On ModellingTharakaKaushalyaÎncă nu există evaluări
- Structural Dynamics Theory 1Document6 paginiStructural Dynamics Theory 1DHRUMIL PATELÎncă nu există evaluări
- TP Sys2Document24 paginiTP Sys2Draw SmailÎncă nu există evaluări
- ME 380 Chapter 2 HW Solution: Review QuestionsDocument5 paginiME 380 Chapter 2 HW Solution: Review QuestionsVisakan ParameswaranÎncă nu există evaluări
- NPTEL Online Course: Control Engineering: Assignment 1Document4 paginiNPTEL Online Course: Control Engineering: Assignment 1udayÎncă nu există evaluări
- 2014 3P4 Midterm 1 SolutionsDocument9 pagini2014 3P4 Midterm 1 SolutionsIsibor CaptainÎncă nu există evaluări
- Modeling and PID Control of Single-Stage Inverted Pendulum SystemDocument5 paginiModeling and PID Control of Single-Stage Inverted Pendulum SystemVictor PassosÎncă nu există evaluări
- Signals and SystemsDocument10 paginiSignals and SystemsKiruthika AlagarÎncă nu există evaluări
- Sliding Mode Control Based On Fractional Order Calculus For DC-DC ConvertersDocument15 paginiSliding Mode Control Based On Fractional Order Calculus For DC-DC ConverterssathishÎncă nu există evaluări
- Report Lab1: Introduction To MATLAB and ScriptsDocument14 paginiReport Lab1: Introduction To MATLAB and ScriptsR.R.S. SavichevaÎncă nu există evaluări
- PHYS 381 W23 Assignment 4Document8 paginiPHYS 381 W23 Assignment 4Nathan NgoÎncă nu există evaluări
- HW No 2. February 26, 2017.docx SolutionDocument4 paginiHW No 2. February 26, 2017.docx SolutionkhalidÎncă nu există evaluări
- Lab 2-CS-Lab-2020Document12 paginiLab 2-CS-Lab-2020Lovely JuttÎncă nu există evaluări
- 40 - PDFsam - Escholarship UC Item 5qd0r4wsDocument1 pagină40 - PDFsam - Escholarship UC Item 5qd0r4wsMohammadÎncă nu există evaluări
- ControlDocument55 paginiControlHuyThaiÎncă nu există evaluări
- Agrisjelyn-R. Bsee Ee416Document4 paginiAgrisjelyn-R. Bsee Ee416jasonaguilon99Încă nu există evaluări
- EE 312 Lecture 1Document12 paginiEE 312 Lecture 1دكتور كونوهاÎncă nu există evaluări
- Chap3 FM PartIIDocument41 paginiChap3 FM PartIIyamen.nasser7Încă nu există evaluări
- Introduction To Control Systems Analysis 1. The Transfer Function 1.1Document7 paginiIntroduction To Control Systems Analysis 1. The Transfer Function 1.1prica_adrianÎncă nu există evaluări
- Frequency Response Analysis: Karl D. Hammond January 2008Document14 paginiFrequency Response Analysis: Karl D. Hammond January 2008Trixie NuylesÎncă nu există evaluări
- CHEMICAL KINETICS Lecture 4Document6 paginiCHEMICAL KINETICS Lecture 4Muhammad TayyabÎncă nu există evaluări
- Entropy: Modeling of A Mass-Spring-Damper System by Fractional Derivatives With and Without A Singular KernelDocument15 paginiEntropy: Modeling of A Mass-Spring-Damper System by Fractional Derivatives With and Without A Singular KernelIrawan MalikÎncă nu există evaluări
- Model Order RedcnDocument10 paginiModel Order RedcnVSÎncă nu există evaluări
- Signals and Systems Papers Set 1Document4 paginiSignals and Systems Papers Set 1KURRA UPENDRA CHOWDARYÎncă nu există evaluări
- Chapter One: Introduction To Matlab What Is MATLAB?: Desktop - Desktop Layout - DefaultDocument16 paginiChapter One: Introduction To Matlab What Is MATLAB?: Desktop - Desktop Layout - DefaultkattaswamyÎncă nu există evaluări
- SLAM of Multi-Robot System Considering Its Network Topology: H. W. Dong, Z. W. LuoDocument2 paginiSLAM of Multi-Robot System Considering Its Network Topology: H. W. Dong, Z. W. LuopaperopenaccessÎncă nu există evaluări
- Control Systems Theory: Transfer Function of Physical Systems STB 35103Document108 paginiControl Systems Theory: Transfer Function of Physical Systems STB 35103Akula Veerraju100% (1)
- Global CMA Error Surface Characteristics, Source Statistic Effects Polytopes and ManifoldsDocument4 paginiGlobal CMA Error Surface Characteristics, Source Statistic Effects Polytopes and ManifoldsShafayat AbrarÎncă nu există evaluări
- Offshore Eng ExamplesDocument25 paginiOffshore Eng ExamplesvinnuzÎncă nu există evaluări
- ME451: Control Theory (Radcliffe) Fall 1994 Final Exam Name Page 1 of 6Document6 paginiME451: Control Theory (Radcliffe) Fall 1994 Final Exam Name Page 1 of 6BizzleJohnÎncă nu există evaluări
- Analog Communication - AM ModulatorsDocument5 paginiAnalog Communication - AM ModulatorsB.Prashant JhaÎncă nu există evaluări
- Unit1 - DSBSC - SSBDocument21 paginiUnit1 - DSBSC - SSBShreesh JoshiÎncă nu există evaluări
- Control Systems Theory: Transfer Function of Physical SystemsDocument108 paginiControl Systems Theory: Transfer Function of Physical SystemsMelanieÎncă nu există evaluări
- Homeworkproblems PDFDocument144 paginiHomeworkproblems PDFVictor LimÎncă nu există evaluări
- Determination of Rate EquationDocument16 paginiDetermination of Rate Equationrachita pandeyÎncă nu există evaluări
- Unit1 - DSBSC - SSBDocument21 paginiUnit1 - DSBSC - SSBnitish kulkarniÎncă nu există evaluări
- Lab 4: Linear Time-Invariant Systems and Representation: ObjectivesDocument6 paginiLab 4: Linear Time-Invariant Systems and Representation: ObjectivesFahad AneebÎncă nu există evaluări
- Classic Control and Compensators.-: Bode PlotDocument14 paginiClassic Control and Compensators.-: Bode PlotEdnna LpÎncă nu există evaluări
- Dynare RBCDocument21 paginiDynare RBCc9bj9bvr5dÎncă nu există evaluări
- Analog Communication - DSBSC ModulationDocument2 paginiAnalog Communication - DSBSC ModulationkhalidÎncă nu există evaluări
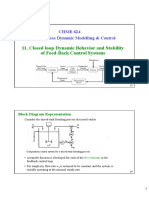
- Closed Loop Dynamic Behavior and Stability of Feed-Back Control SystemsDocument21 paginiClosed Loop Dynamic Behavior and Stability of Feed-Back Control Systemsali aljifriÎncă nu există evaluări
- Lab 02Document2 paginiLab 02CHEANG HOR PHENGÎncă nu există evaluări
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)De la EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)Încă nu există evaluări
- Transmutation and Operator Differential EquationsDe la EverandTransmutation and Operator Differential EquationsÎncă nu există evaluări
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianDe la EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianEvaluare: 5 din 5 stele5/5 (1)
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesDe la EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesÎncă nu există evaluări
- Content Beyond SyllabusDocument3 paginiContent Beyond SyllabusRahul PolÎncă nu există evaluări
- APP157 CoP For Site Supervision 2009 202109Document92 paginiAPP157 CoP For Site Supervision 2009 202109Alex LeungÎncă nu există evaluări
- Stainless Steel: Presented By, Dr. Pragati Jain 1 YearDocument68 paginiStainless Steel: Presented By, Dr. Pragati Jain 1 YearSneha JoshiÎncă nu există evaluări
- Problem 1-4Document6 paginiProblem 1-4Anonymous xIzzEifjPÎncă nu există evaluări
- Detailed Lesson Plan in Science 5Document5 paginiDetailed Lesson Plan in Science 5hs4fptm82gÎncă nu există evaluări
- Uses of The Components of Crude Oil As FuelsDocument6 paginiUses of The Components of Crude Oil As FuelsPearl LawrenceÎncă nu există evaluări
- 9C606C.64 To 65Document24 pagini9C606C.64 To 65SHIRISHA YADAVÎncă nu există evaluări
- Constraints in DBMS - Types of Constraints in DBMS - Gate VidyalayDocument5 paginiConstraints in DBMS - Types of Constraints in DBMS - Gate VidyalayBivek Man SinghÎncă nu există evaluări
- Data Structure Algorithm Using C PresentationDocument245 paginiData Structure Algorithm Using C PresentationdhruvwÎncă nu există evaluări
- University of Tennessee - ChattanoogaDocument34 paginiUniversity of Tennessee - ChattanoogaMALIK ZARYABBABARÎncă nu există evaluări
- SuperOhm 3754 (3748-11) - Technical Data Sheet - ECC - Rev 2 - 2016-09Document2 paginiSuperOhm 3754 (3748-11) - Technical Data Sheet - ECC - Rev 2 - 2016-09igor brocaÎncă nu există evaluări
- Shock AbsorberDocument0 paginiShock AbsorberSahaya GrinspanÎncă nu există evaluări
- VAPORISERDocument62 paginiVAPORISERAshish ChavanÎncă nu există evaluări
- GYANDOOT SamitiDocument16 paginiGYANDOOT SamitivinaykoolsÎncă nu există evaluări
- Peugeot 3008 BrochureDocument18 paginiPeugeot 3008 Brochuremihai12moveÎncă nu există evaluări
- NAWTEC18-3507: Comparison of Acid Gas Control Technologies in Efw FacilitiesDocument10 paginiNAWTEC18-3507: Comparison of Acid Gas Control Technologies in Efw FacilitiesPunki KokoÎncă nu există evaluări
- EM000039Rev1 PDFDocument1 paginăEM000039Rev1 PDFGustavo RiveraÎncă nu există evaluări
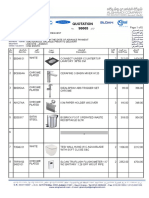
- Quotation 98665Document5 paginiQuotation 98665Reda IsmailÎncă nu există evaluări
- On-Farm Composting Methods 2003 BOOKDocument51 paginiOn-Farm Composting Methods 2003 BOOKlalibÎncă nu există evaluări
- SECTION 1213, 1214, 1215: Report By: Elibado T. MaureenDocument19 paginiSECTION 1213, 1214, 1215: Report By: Elibado T. MaureenJohnFred CativoÎncă nu există evaluări
- Limak 2017 Annual ReportDocument122 paginiLimak 2017 Annual Reportorcun_ertÎncă nu există evaluări
- Sd-1-Parts-Book Manual Propietario SpreaderDocument30 paginiSd-1-Parts-Book Manual Propietario Spreadergabriel sanchezÎncă nu există evaluări
- Qualcast 46cm Petrol Self Propelled Lawnmower: Assembly Manual XSZ46D-SDDocument28 paginiQualcast 46cm Petrol Self Propelled Lawnmower: Assembly Manual XSZ46D-SDmark simpsonÎncă nu există evaluări
- Features: 833H - 1A - F - CDocument3 paginiFeatures: 833H - 1A - F - CDaniboy1994Încă nu există evaluări
- To Dmaic or Not To DmaicDocument1 paginăTo Dmaic or Not To Dmaicritch99Încă nu există evaluări