S-ar putea să vă placă și
- Hand Motion Controlled Robotic ArmDocument5 paginiHand Motion Controlled Robotic ArmRameshkumar JayaramanÎncă nu există evaluări
- Project ReportDocument66 paginiProject ReportKashikaJunejaÎncă nu există evaluări
- Review 1 (Phase II) - Batch-02 ModifiedDocument27 paginiReview 1 (Phase II) - Batch-02 ModifiedVi LÎncă nu există evaluări
- Project Synopsis 2Document21 paginiProject Synopsis 2shailesh devaneÎncă nu există evaluări
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsDe la EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsÎncă nu există evaluări
- Unit-45 Industrial System LO011 and LO02Document14 paginiUnit-45 Industrial System LO011 and LO02Chathura RanathungaÎncă nu există evaluări
- Review 1 (Phase II) - Batch-02 ModifiedDocument27 paginiReview 1 (Phase II) - Batch-02 ModifiedVi LÎncă nu există evaluări
- Wearable Electrical Device Control With Audio NotificationDocument45 paginiWearable Electrical Device Control With Audio NotificationmuhammedfarhanÎncă nu există evaluări
- Trisha Raj ProjectDocument19 paginiTrisha Raj ProjectSameen AhmadÎncă nu există evaluări
- Report (1) (2) Anti Loss DeviceDocument18 paginiReport (1) (2) Anti Loss DeviceakshayÎncă nu există evaluări
- Journalnx ServicingDocument3 paginiJournalnx ServicingJournalNX - a Multidisciplinary Peer Reviewed JournalÎncă nu există evaluări
- Night Patrol RobotDocument10 paginiNight Patrol RobotBlack Hat100% (1)
- Hardware Training Report NEWDocument45 paginiHardware Training Report NEWhr. infotechnogenplÎncă nu există evaluări
- Overcurrent Protection System Using MicrocontrollerDocument14 paginiOvercurrent Protection System Using MicrocontrollerSritam Kumar deyÎncă nu există evaluări
- Remote Area Monitoring RobotDocument5 paginiRemote Area Monitoring RobotIJSTEÎncă nu există evaluări
- CHNDDocument22 paginiCHNDchandhuÎncă nu există evaluări
- Chapter One InstruDocument17 paginiChapter One Instrubahiru meleseÎncă nu există evaluări
- Elite Project Report: Gesture Controlled RobotDocument17 paginiElite Project Report: Gesture Controlled RobotMallika 19Încă nu există evaluări
- Mini Project SrihariDocument14 paginiMini Project SrihariAshik GRÎncă nu există evaluări
- Laboratory Manual: 18EC3017 Biomedical Electronics & IOT For HealthcareDocument11 paginiLaboratory Manual: 18EC3017 Biomedical Electronics & IOT For HealthcareGo StargÎncă nu există evaluări
- Distance Measurement System Project Report - Amit BarDocument32 paginiDistance Measurement System Project Report - Amit BarAmit BarÎncă nu există evaluări
- Irjet V5i11169Document13 paginiIrjet V5i11169Sumardi Sadi FT UMTÎncă nu există evaluări
- Pemotong Kayu Secara OtomatisDocument18 paginiPemotong Kayu Secara OtomatisDika NimassÎncă nu există evaluări
- 6 II February 2018Document6 pagini6 II February 2018oyukiisaacÎncă nu există evaluări
- Design of Light Intensity Detection System Based On STM32: Yunhua ZhouDocument5 paginiDesign of Light Intensity Detection System Based On STM32: Yunhua Zhouff314wcpkÎncă nu există evaluări
- Department of Technical EducationDocument12 paginiDepartment of Technical EducationDinesh NÎncă nu există evaluări
- Research Proposal (Plaza)Document10 paginiResearch Proposal (Plaza)Edmarjan ConcepcionÎncă nu există evaluări
- SSRN Id3645388Document9 paginiSSRN Id3645388Issa BakariÎncă nu există evaluări
- Line Follower Using AT89c51Document40 paginiLine Follower Using AT89c51api-26623078100% (6)
- An Open-Source Non-Contact Thermometer Using Low-Cost Electronic ComponentsDocument13 paginiAn Open-Source Non-Contact Thermometer Using Low-Cost Electronic ComponentsBuddhiÎncă nu există evaluări
- Human Detection Robot Using PIR SensorDocument16 paginiHuman Detection Robot Using PIR SensorAnuj TripathiÎncă nu există evaluări
- EEE 3210 Final Project ReportDocument19 paginiEEE 3210 Final Project ReportDerrick ThamÎncă nu există evaluări
- Project Report JointDocument26 paginiProject Report JointKamal AshrafÎncă nu există evaluări
- An Intelligent Line-Following Robot Project For Introductory Robot CoursesDocument7 paginiAn Intelligent Line-Following Robot Project For Introductory Robot CoursesSrikrishna JanaÎncă nu există evaluări
- An Intelligent Line-Following Robot Project For Introductory Robot Courses PDFDocument7 paginiAn Intelligent Line-Following Robot Project For Introductory Robot Courses PDFHo Van RoiÎncă nu există evaluări
- FinalDocument29 paginiFinal461MANJULAÎncă nu există evaluări
- Chapter-2 Transducers, Sensors and ActuatorsDocument105 paginiChapter-2 Transducers, Sensors and Actuatorskrishnareddy_chintalaÎncă nu există evaluări
- Contact Less Digital Tachometer: Mini Project OnDocument45 paginiContact Less Digital Tachometer: Mini Project OnMayur Chandak0% (1)
- Chapter 2 Transducers Sensors and Actuators PDFDocument105 paginiChapter 2 Transducers Sensors and Actuators PDFramakrishnankctÎncă nu există evaluări
- 4.development of Electricity Theft Detection Using Smart Meter in Power Distribution Network Based On Wireless TechnologyDocument9 pagini4.development of Electricity Theft Detection Using Smart Meter in Power Distribution Network Based On Wireless Technology1382aceÎncă nu există evaluări
- Fin Irjmets1658977133Document7 paginiFin Irjmets1658977133Hussein AlzoubaidiÎncă nu există evaluări
- Zhang 2021 J. Phys. Conf. Ser. 1802 032030Document6 paginiZhang 2021 J. Phys. Conf. Ser. 1802 032030Keshav PathakÎncă nu există evaluări
- Choosing The Right Industrial Digital I/O Module For Your Digital Output SensorDocument7 paginiChoosing The Right Industrial Digital I/O Module For Your Digital Output SensoracgaitanÎncă nu există evaluări
- Matlab Colour Sensing RobotDocument5 paginiMatlab Colour Sensing Robotwaqas67% (3)
- Motion Sensor Using PirDocument10 paginiMotion Sensor Using PirSHRUTI MOONÎncă nu există evaluări
- Low Cost Thermocol Cutter: Tejal Jagdale, Monika Kirodiwal, Fatema Shaikh, Pranami SharmaDocument4 paginiLow Cost Thermocol Cutter: Tejal Jagdale, Monika Kirodiwal, Fatema Shaikh, Pranami SharmaerpublicationÎncă nu există evaluări
- Report SampleDocument13 paginiReport SampleAbuzar KhanÎncă nu există evaluări
- Distance Measuring Instrument-1Document25 paginiDistance Measuring Instrument-1Nisha PatelÎncă nu există evaluări
- Survillance Rover Final ReportDocument57 paginiSurvillance Rover Final ReportAdhiraj SaxenaÎncă nu există evaluări
- Smart Phone Controlled Electrical MachineDocument5 paginiSmart Phone Controlled Electrical MachinepradeepeeekingÎncă nu există evaluări
- Weather Monitoring SystemDocument20 paginiWeather Monitoring System205.Vyshnavi GrandhiÎncă nu există evaluări
- RPM IndicatorDocument39 paginiRPM IndicatorAnkur PatelÎncă nu există evaluări
- FDS Lab04Document7 paginiFDS Lab04Mack99tsÎncă nu există evaluări
- Minor ProjectDocument12 paginiMinor Projectganapati v bhagwatÎncă nu există evaluări
- IOT Based Remote Monitoring For HT Motors in ThermDocument7 paginiIOT Based Remote Monitoring For HT Motors in ThermGokulnathan NÎncă nu există evaluări
- Ashutosh Mahapatro Gu-2019-3328-L (Industrial Training Report)Document28 paginiAshutosh Mahapatro Gu-2019-3328-L (Industrial Training Report)kanwarpreet singhÎncă nu există evaluări
- RF Based Home-AutomationDocument58 paginiRF Based Home-AutomationRahul SainiÎncă nu există evaluări
- Degital Techacometer.Document5 paginiDegital Techacometer.poornarithikÎncă nu există evaluări
- Research Inventy: International Journal of Engineering and ScienceDocument10 paginiResearch Inventy: International Journal of Engineering and ScienceresearchinventyÎncă nu există evaluări
- Product Specifications Product Specifications: HSX15 HSX15 - 71 71Document5 paginiProduct Specifications Product Specifications: HSX15 HSX15 - 71 71Rodrigo PusaricoÎncă nu există evaluări
- Irish Folk SongsDocument52 paginiIrish Folk Songsgdguitarist94% (18)
- Sergiu Celibidache Teaching SessionDocument7 paginiSergiu Celibidache Teaching SessionNabernoeÎncă nu există evaluări
- Radar Target Detection Using Target Features and Artificial IntelligenceDocument4 paginiRadar Target Detection Using Target Features and Artificial IntelligenceAbhishek SharmaÎncă nu există evaluări
- DVB-TH Transmitter MeasurementsDocument30 paginiDVB-TH Transmitter MeasurementsStarLink1Încă nu există evaluări
- GMB Lyrics: Holy OneDocument3 paginiGMB Lyrics: Holy OneRiniÎncă nu există evaluări
- GPS Tracker Manual GPS 318Document12 paginiGPS Tracker Manual GPS 318LudgardoPlatónBarbaitoAylluni83% (6)
- HOW DEEP IS YOUR LOVE CHORDS (Ver 5) by Bee Gees @Document7 paginiHOW DEEP IS YOUR LOVE CHORDS (Ver 5) by Bee Gees @Roberto CastilloÎncă nu există evaluări
- 5 GHZ Directional Panel Patch Antenna DatasheetDocument2 pagini5 GHZ Directional Panel Patch Antenna DatasheetSebastian Morales ToledoÎncă nu există evaluări
- Bela Lugosi and Boris Karloff - The Expanded Story of A Haunting Collaboration, With A Complete Filmography of Their Films TogetherDocument702 paginiBela Lugosi and Boris Karloff - The Expanded Story of A Haunting Collaboration, With A Complete Filmography of Their Films TogetherDryRot100% (1)
- Moment For Morricone-1st Trumpet in BBDocument3 paginiMoment For Morricone-1st Trumpet in BBFran LubiánsÎncă nu există evaluări
- FNI Report: WRFD-010651 HSDPA Over Iur: Huawei Technologies Co., LTDDocument25 paginiFNI Report: WRFD-010651 HSDPA Over Iur: Huawei Technologies Co., LTDMashaalÎncă nu există evaluări
- Eternal AlexanderDocument10 paginiEternal AlexanderCarla Vanzo NutriÎncă nu există evaluări
- Fairy Tail - Dragon Slayer Theme Tab PDFDocument10 paginiFairy Tail - Dragon Slayer Theme Tab PDFDanÎncă nu există evaluări
- English Advanced Book by Alex Alejandro JimenezDocument176 paginiEnglish Advanced Book by Alex Alejandro JimenezTanit Alcira Guerra HuarangaÎncă nu există evaluări
- Neusidler Saltarello PDFDocument8 paginiNeusidler Saltarello PDFthieves11Încă nu există evaluări
- Two Music Videos of The Same SongDocument4 paginiTwo Music Videos of The Same Songapi-533980796Încă nu există evaluări
- Psycology PDFDocument99 paginiPsycology PDFJaya LakshmiÎncă nu există evaluări
- Domestic Bliss and Other Oxymorons - YourperipheryDocument64 paginiDomestic Bliss and Other Oxymorons - Yourperipheryspnmissingfic100% (4)
- Mankind. Está Correta Na Forma Negativa No Simple Present Na OpçãoDocument3 paginiMankind. Está Correta Na Forma Negativa No Simple Present Na OpçãovivianeÎncă nu există evaluări
- One Direction Little Things WorksheetDocument2 paginiOne Direction Little Things WorksheetAmanda Del GrandeÎncă nu există evaluări
- DataDocument9 paginiDataIván Alexander Chero CabreraÎncă nu există evaluări
- 1 - JT-2019-001TerminologyDocument13 pagini1 - JT-2019-001TerminologyCsongor KicsiÎncă nu există evaluări
- I Can't Stand The Rain (3 Horn)Document18 paginiI Can't Stand The Rain (3 Horn)JW Orr100% (1)
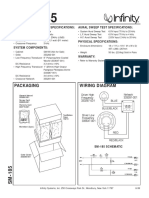
- Infinity sm-185Document2 paginiInfinity sm-185Bmwmotorsport GabriÎncă nu există evaluări
- Gala Dinner SpeechDocument5 paginiGala Dinner SpeechRaihan AanÎncă nu există evaluări
- NShield Hardware InstallationDocument60 paginiNShield Hardware InstallationARMAGEDDON87Încă nu există evaluări
- The 'Bollywoodization' of The Indian CinemaDocument14 paginiThe 'Bollywoodization' of The Indian CinemaSajjad JafferyÎncă nu există evaluări
- Laura Pausini (Keyboard)Document3 paginiLaura Pausini (Keyboard)LesterGarciaEspinosaÎncă nu există evaluări
- Could Have Should Have Would Have Exercise 1Document3 paginiCould Have Should Have Would Have Exercise 1Juan PérezÎncă nu există evaluări