Documente Academic
Documente Profesional
Documente Cultură
) Cti, C: SPIE Vol. 491 High Speed Photography (Strasbourg 1984) / 411
Încărcat de
Jessica Mechato MauricioTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
) Cti, C: SPIE Vol. 491 High Speed Photography (Strasbourg 1984) / 411
Încărcat de
Jessica Mechato MauricioDrepturi de autor:
Formate disponibile
A new method of mirror Compensation
Yao
Yao Wenxue
Xi'an Institute of Optics and Precision
Optics and Academia Sinica
Mechanics, Academia
Precision Mechanics, Sinica
Abstract
steel rotating
This paper describes a steel
This mirror has
The mirror
rotating mirror. The applied in
been applied
has been high
the high
in the
photographic camera of the compensation type
speed photographic
speed the optical
type as the compensator. The
optical compensator. article
The article
principle of
discusses the compensation principle
discusses optical unit
the optical
of the equation of
and equation
unit and calcu-
parameters calcu-
of parameters
lation. We
lation. it as the
We use it compensator which
optical compensator
the optical given optical
has given
which has for aa
compensation for
optical compensation
to 150m
moving film up to The camera
/s. The
150m/s. is raised
rate is
camera rate raised to fps.
1C)5 fps.
to 105
Compensation Principle
shown in
As shown Fig.1. aa front
in Fig.1. optical system
front optical of camera
system of formed aa real
camera formed image I1
real image object
of aa object
I-j of
the mirror m.
near a surface of the The virtual
m. The image I1'
virtual image of real
1-j ' of image was
real image formed by
was formed mirror
the mirror
by the
m. when the mirror m was rotating
m. about an
rotating about axis 00 , such virtual image
an axis , continua-
image would move continua-
lly as
lly the principle of
as the image.
mirror image.
of mirror
/ (2511- ,- N( )Cti;,C
Fig.1
two different position m1
For two
For m^ and rap of
and m2 the mirror,
of the there are
mirror, there two virtual
are two image I1'
virtual image and
I-j ' and
I^j
I1. The off-axis
. The image point
off -axis image from ^-j
point EE from to 82»
moves to
'?1moves es vector
expressed £S
E2, expressed vector E. vector has
E. This vector has
projected by the projective
projected lens 12
projective lens image E'
formed aa image
T«2 formed E f at the film.
at the When the
film. When rotating
mirror rotating
the mirror
at high
at high speed, image E'
speed, image rapidly. If
move rapidly.
could move
E 1 could If the direction of
the direction of the film motion
the film is the
motion is same
the same
as the direction of the
as the image motion
the image and the
motion and value of
the value motion is
image motion
of image equal to
is equal value of
the value
to the of
time for
exposure time
film motion during exposure frame, the
geven frame,
for aa geven image is
optical image
the optical quiescent
relative quiescent
is relative
the film,
with the film, we called thatthat the image realized
optical image
the optical compensation for
realized compensation film of
for film motion.
the motion.
of the
Parametric equation
Parametric
to the motion rule of optical image,
According to image, wewe may find the
may find image motion
the equation of image motion
in rectangular
in system. If
rectangular coordinate system. the image
If the were a point
image were located on
point located the axis
on the rotation
of rotation
axis of
image would
thickness, image
of a mirror of infinitesimal thickness, have not
would have relative motion.
not relative Practically,
motion. Practically,
however, the mirror must be
however, of finite
be of and axis
thickness and
finite thickness of rotation
axis of away from
rotation away reflective
its reflective
from its
surface, the
surface, must be
the image also must of finite
be of size. As
finite size. shown in
As shown Fig.2. the
in Fig.2. mirror, whose
themirror, semi-
whosesemi -
is rr in
thickness is
thickness located in
direction, was located
the normal direction,
in the rectangular coordinate
in rectangular its
system, its
coordinate system,
originating was located at the point
at the on-axis
of on
point of image. The
of image.
-axis of The parametric describing
equations describing
parametric equations
the locus
the image point
locus of the image off-axis
of off
point pp of semiheight hh are
-axis semiheight are
X = 2E cos2A -- hsin20
hsin2$ ;D
(1 )
SPIE Vol. 491
SPIE Vol. 491 High
High Speed
Speed Photography
Photography(Strasbourg
(Strasbourg1984)
1984)// 411
411
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 06/24/2016 Terms of Use: http://spiedigitallibrary.org/ss/TermsOfUse.aspx
Y =E
=£ ssin20
in2 e+ +hcos26
hcos2B (2)
Where is aa distance from the
is -axis point
on-axis
the on of real
point of image to
real image reflective point
the reflective
to the point in the
surface.
mirror surface. is a rotating angle
is of the
angle of mirror.
the mirror.
the real image,
point of the
For any point give the
image would give
image, The mirror image of the
locus of
the locus Pascal's
the Pascal's
line when
serpentine line
serpentine rotating. Its
the mirror was rotating.
when the the compound
from the
Its value may abe obtained from of
compound of
the coordinage differentials of
the of the locus.
image locus.
the image
ds =/
ds =idx2 dy2
dx 2 ++ dy2 (3)
r? Prod aced by yv t.ÿ, t,ar
Ìetic -t E .SG[r y aC -
Pig.
Fig.22
The differential
The dy) may be projected
dx and dy)
differential vectors ( cbc ( two directions,
in two
projected in perpendicular
directions, perpendicular
axial to
and axial the optical axis of the
to the lens. The
projective lens.
the projective former is
The former called the
is called motion.
image motion.
the image
The latter is
The latter called out
is called of focus.
out of focus. Their expressions are
dl -dxsin28 ++ dycos20
dl = -dxsin20 dycos28 (4)
(4)
da dxcos28 ++ dysin20
da = dxcos20 dysin28 (5)
(5)
To get dx
To get dy, we
and dy,
dx and used the normal equation
we used of the
equation of surface of
the mirror surface rotation centre
of rotation at
centre at
the
the point P<> (x,
point P. (x 0 ,yo
,y0).
(x x
(x - x, ) -ye ) sine = r
nose + (y(y-y0 (6)
(6)
=0 then
Let yy=0 then
f= xo
£= + ya tg
yp tg -f+ r/cos0
r/cose (7)
eqnation (7)
The egnation is substituted in
(7) is equation (1)
the equation
in the (2), followed
and (2),
(1) and differentiating
by differentiating
followed by
the expression of
the expression and dy
dx and
of dx can be
dy can obtained. The
be obtained. The expression of dx and dy is in
substituted in
is substituted
the equation
the (4) and
equation (4) (5) and simplitied then
and (5)
-2(x, +-f rcos
dl = -2(x, )dg
rcos )d8 (8)
(8)
2(y0 +-f rsin
da == 2(yo e -- h)d6
rsin£ h)de (9)
(9)
The total
The image motion
total image is produced by the rotating mirror in
motion is full exposure
the full
in the of
time of
exposure time
a frame.
412 //SPIE Vol. 491
SPIEVol. High Speed
491 High (Strasbourg 1984)
Speed Photography (Strasbourg 1984)
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 06/24/2016 Terms of Use: http://spiedigitallibrary.org/ss/TermsOfUse.aspx
)' ei
,dl
dl =
)(
¡Be s&
Di
1-2(x
)-2(x 0 + TCOS&
0,
)d0
rcosB )d8 (10)
eZ
so -2x 0 (0£-0( )-2r(sin<3 2 - sine,
I dl = -2x,(84-0,)-2r(sin02- sine,)) (11)
out of focus is
The out
The
(**
(ez (^Ba
)Jda
da =
= 2(y0 -f+ rsinB
} 52(y0 -h)d6
rsin8 -h)dB (12)
e,t
/Q al
Xp (
(^
so 2yb (9Z
) )6da = 2y0 (01-4)-2r_(cos61Z- D,)-2h(D-B,)
- Q( )-2r(cospz - cos B, )-2h(0 x - B, ) (13)
so * &<
The protective
The projective lens formed image motion
the image
formed the on the
motion on film is
the film is
dl
dl'
1 I¡a2* = M(da| * tg
M(dale, -dlt 2 )
tgf-dlle2 (14)
s, e, a,
Where M is
Where is the lateral of the
magnification of
la.teral magnification the projective lens. ty is
protective lens. the angle subtended
is the
semiheight h.
seraiheight h. The during exposure
The value of film motion during time of
exposure time frame.
of aa frame.
dlf - H K 36Óh (15)
Where H is the spread
is the spread of frame, J)
of aa frame, is the
}) is rate, K is
the photographic rate, the number
is the of line
number of of
line of
is rotation number of
frame, nn is
frame, mirror.
rotating mirror.
of rotating
compensation for
optical compensation
To realize the optical film of
the film
for the must meet
motion must
of motion ralation
the ralation
meet the
dl f
dl'f == dl
dl (16)
Practically, however,
Practically, however, the compensation for
complete compensation
the complete every point
for every of aa frame
point of not po-
is not
frame is po-
ssible. We
ssible. We require that the the optical
between the
the difference between motion and
image motion
optical image motion
film motion
and film
during exposure
during frame is
exposure time of a frame not more
is not than allòwed
more than value for
allowed value image quality.
for image is
That is
quality. That
dlf -
I dlf dl'J =
dl'J -£ nl
Al (17)
(17)
We called £1 the residual
61 the WhenM M=1
motion. When
residual motion. give
=1 give
9,
dl''g2 da |**
= dal tg^-dlj^
tg1 -dl i (18)
B, 8, B,
If da
If < 11
da< h« ww (w(w is
and h<<C
and the object
is the of the
distance of
object distance the projective lens)
projective lens)
B,
Then dl'1
dl +s, -dl J
= -dl
B,
(19)
sign expresses
The negative sign reversal of
expresses reversal direction ofof the
of direction motion. IfIfM M%1
themotion. give
#1 give
dl'8Z = -Mdl`Z (20)
(20)
Then dl -dl'M
= -d1' la /M (21)
(21)
el
the value dl'j
Substitute the
Substitute /fv)
d1'171.1 in the
in (11), x,
the equation (11), is determined which
x0 is requast
meet requast
which meet
of the compensation. Gy
velocity on
image-velocity
of image-
The equation of the film
on the may be expressed
film may
Vimage= a
-Co
Cu (22)
-^ 4 '
(because Vimage=-~-
Vimage= dt ^"t
at= )
(8) and
The equation (8) (9) is
and (9) in equation
substituted in
is substituted (13) (not
equation (13) consider region
(not consider of angle)
region of angle)
(22) and
equation (22)
then substituted in equation give
simplifying, give
and simplifying,
SP /EVol.
SPIE Vol.491
491High
HighSpeed
SpeedPhotography
Photography(Strasbourg
(Strasbourg1984)
1984)// 413
41 3
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 06/24/2016 Terms of Use: http://spiedigitallibrary.org/ss/TermsOfUse.aspx
(x 0
Vimage=2M w (x, rcosa )+(Yo + rsin
+ roost!) rsinft
6 - h)tg y, (23)
oT
oA
0,5
04
t>3
0.2
0.]
19 20 21 22 23 24
[i.l,r'-S of* )'lÚ , ; ta
r .F
Fig.
Fig.33
Fig.3. the curve of image motion and the
shows the
Fig.3. shows film motion
the film exposure time
during exposure
motion during of aa
time of
frame.
frame. They are a linear function angle. The
of angle.
function of motion of
image motion
The image on-axis
of on realize
-axis point may realize
compensation for
perfectly optical compensation film motion.
the film
for the optical compensation
The optical
motion. The off-axis
compensationofofoff -axis
point is
point point of
is worse than the point -axis. The
on-axis.
of on motion increases with the
residual motion
The residual increase of
the increase of
mirror. The
rotating angle of mirror. effect of
compensation effect
The compensation -axis point
off-axis
of off point in different height get
height get
batter with image
batter with height decrease.
image height So controling the height of
decrease. So image about
real image
of real rotating
the rotating
about the
important method to
is a important
mirror is motion.
residual motion.
to decrease residual
Fig.4 the curve
Fig.4 shows the of out
curve of of focus
out of of onon-axis
focus of -axis point and off
point and -axis point.
off-axis the
point. Frome the
curve we
curve we find that can be
it can
that it neglected for
be neglected the onon-axis
for the point but
-axis point must be
but must consideredfor
be considered off-
foroff -
point.
axis point.
Mtn
0.4-
d.3'
02-
OJ-
O 20 21 22 23
-0.)
-a2
-0.3-
-O.g
;,;7' 4 C rVe> 01 p0 fi out *oCU.S
Fig.
Fig.44
SPIEVol.
414 //SPIE 491 High
Vol. 491 Photography (Strasbourg 1984)
Speed Photography
HighSpeed
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 06/24/2016 Terms of Use: http://spiedigitallibrary.org/ss/TermsOfUse.aspx
The value of out of focus
focus is
is shown
shown toto increase
increase with
with the
the increase
increase of
of rotating
rotating angle
angle of
of
mirror. of out
mirror. The curve of out of
of focus
focus for
for two
two off
off-axis
-axis point is symmetric distribution
point is distribution byby con-
con-
trast. When we
trast. instrumentation for
we corrected instrumentation for the
the accuracy
accuracy ofof request
request have
have to
to formed
formed the
the on-
on-
axis on the
axis image point on the film.
film.
Fig.5 the curve
Fig.5 shows the curve of
of velocity
velocity of
of the
the onon-axis point (h
-axis point (h=0),
=0), the
the off-axis
off -axis point
point ( (th)
t- h)
and
and the
the film during exposure time
time of
of aa frame.
frame.
240-
2/0
/30
150-
PD
90
to
30
13 19 20 22
an
Fig.5
As shown from the curves,
curves, the
the velocity
velocity V+KVot and the velocity V,
and the V0 is
is increasing
increasing with
with the
the
increase
increase of
of rotating
rotating angle
angle of the
the mirror.
mirror. The velocity curves are the the linear
linear function
function of
of
of the
rotating angle of the mirror.
mirror. The
The velocily
velocily ofof off
off-axis
-axis point then the
point is higher then the film
film velo-
velo-
city.
city. The
The velocity of onon-axis
-axis point
point is
is lower
lower than
than the
the film
film velocity
velocity before the
the point
point AA of
of
complete
complete comp of the
comp ensation of the velocity
velocity but
but the
the velocity
velocity of
of on
on-axis is higher than
-axis point is than the
the
film velocity behind the point A of of the
the complete
complete compensation
compensation ofof the
the velocity.
velocity.
Design of
of Rotating-
Rotating-mirror
mirror
In
in design for camera of
of rotating-
rotating-mirror
mirror compensation,
compensation, since image motion have
since the image have been
been
compensated the
compensated the film motion.
motion. The
The effect
effect of
of image
image motion
motion for
for the
the quality
quality of
of image
image can
can be
be
neglected.
neglected. The
The out is aa chief
out of focus is chief factor
factor for
for the
the effect
effect of
of image
image quality.
quality.
From eqution
eqution (9)
(9) we find
find the
the following
following ways
ways is
is useful.
useful. 1.
1. To
To decrease
decrease the
the coordinate
coordinate
value y,
y0 of centre ofof the
the rotating
rotating mirror.
mirror. 2.
2. To
To decrease
decrease the
the semi-
semi-thickness valne rr of
thickness valne of the
the
rotating
rotating mirror. 3« To decrease the
mirror. 3. the value hh of
of the
the semiheight
semiheight ofof the
the image.
image. 4.
4. To
To decrease
decrease
an increment dd of angle of of rotation
rotation of
of mirror
mirror for
for one
one frame.
frame.
In
In practice
practice we
we have
have been known that the
the image
image height may bebe controled.
controled. The
The angle
angle dd is
is
dependent
dependent on
on the
the time of a frame
time of exposure of frame or
or the
the operture
operture of
of the
the project
project lens.
lens. The
The value
value
y0 is
ya is dependent of semi
dependent on size of semi-thickness
-thickness rr of
of mirror.
mirror. The
The value
value rr is
is dependent on on size
size of
of
a reflective
reflective surface. reflective surface
surface. The size of a reflective surface is
is determined
determined byby height
height of
of real
real image,
image,
the position of
the position of the
the real image and exit
exit angle ofof marginal ray
ray of
of the
the real
real image.
image.
As shown in
in Fig.6.
Fig.6. There
There is
is the
the projective
protective lens
lens in
in aa working
working region
region and
and optical
optical axis
axis of
of
the projective
the protective lens is
is in
in accord
accord and
and with
with on
on-axis
-axis principal
principal ray which isis reflected
reflected byby the
the
mirror.
We could make the mirror's rr through
through the
the point
point of
of reflection.
reflection. When
When we
we finished
finished calcula-
calcula-
tion of the
the optical system structures.
structures, the
the image
image semiheight
semiheight (h)
(h) was
was known.
known. The
The distance
distance (£ ) ( )
the real image
from the image to reflective point
point of
of reflective
reflective surface
surface was
was known.
known. The
The distance
distance (1
(l )
the field
from the lens to
field lens to the real image
image was known.
known. Thus
Thus the
the angle
angle between
between marginal
marginal ray
ray (b)
(b) of
of
off-axis
off -axis and
and the
the principal
principal ray
ray can
can be determined. WeWe could
could calculate
calculate semi
semi-thickness
-thickness ofof the
the
SPIE Vol.
SPIE Vol.491
491 High
High Speed
SpeedPhotography
Photography(Strasbourg
(Strasbourg1984)/
1984) / 415
415
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 06/24/2016 Terms of Use: http://spiedigitallibrary.org/ss/TermsOfUse.aspx
rotating mirror. Its expression given
mirror. Its
rr =- h(o5 cis +0) +(E +htte)Sin0C050 (.24)
(,24)
Cos 0 Cos (4, t 0 )
Where NN is
Where surface.
is number of reflective surface.
F%, 6 Des ;n 01- Dotar -6n ìl`Yar
Fig.6
References
E.A.Lgel, Design calculations for
1. E.A.Lgel,
1. for Rotating- cameras. Applied
Mirror cameras.
Ro tat ing-Mirror optics. 1965.
Applied optics. 1965.
Vol.
Vol.4.D;o.9. P1166-1176.
4. No. 9- P1166 -1176.
2. Yao
2. Yao wenxue Design for 70mm
Design for of rotating
camera of
70mm camera -prism compensation.
rotat ing-prism compensation.
the second
Proceedings of the national congress
second national on High
congress on High-speed photography. 1979*
-speed photography.1979.
416 //SPIE
SPIEVol.
Vol. 491
491High
HighSpeed
SpeedPhotography
Photography (Strasbourg
(Strasbourg 1984)
1984)
Downloaded From: http://proceedings.spiedigitallibrary.org/ on 06/24/2016 Terms of Use: http://spiedigitallibrary.org/ss/TermsOfUse.aspx
S-ar putea să vă placă și
- Cross CorelationDocument6 paginiCross Corelationpratap khuntiaÎncă nu există evaluări
- GijeongJang OpticsLetter2006Document3 paginiGijeongJang OpticsLetter2006g c agnihotriÎncă nu există evaluări
- Geometric Optics and Camera, Practically - HlavácDocument134 paginiGeometric Optics and Camera, Practically - HlavácVineet MukimÎncă nu există evaluări
- Laws of Lenses and Optical InstrumentsDocument5 paginiLaws of Lenses and Optical InstrumentsJose GalvanÎncă nu există evaluări
- 2009 - SCI - Correction of Field Distortion of Laser Marking Systems Using Surface Compensation FunctionDocument6 pagini2009 - SCI - Correction of Field Distortion of Laser Marking Systems Using Surface Compensation FunctionozguraliÎncă nu există evaluări
- UntitledDocument40 paginiUntitledosaydÎncă nu există evaluări
- Calibration of Fish-Eye Stereo Camera For Aurora ObservationDocument6 paginiCalibration of Fish-Eye Stereo Camera For Aurora ObservationZikang XieÎncă nu există evaluări
- Calibration Method For Misaligned Catadioptric CameraDocument8 paginiCalibration Method For Misaligned Catadioptric CameraHapsari DeviÎncă nu există evaluări
- Zernike Wavefront AberrationsDocument26 paginiZernike Wavefront AberrationsgastromonoÎncă nu există evaluări
- Polscope Reference 1Document8 paginiPolscope Reference 1souryaya duttaÎncă nu există evaluări
- PosterDocument1 paginăPosterCHAKER TAYEBÎncă nu există evaluări
- Photometric Law of DistanceDocument3 paginiPhotometric Law of DistanceJose GalvanÎncă nu există evaluări
- Optics Lenses and Image Formation Depth of Field Numerical Aperture Resolution Instrument Specimen Preparation Contrast ExamplesDocument14 paginiOptics Lenses and Image Formation Depth of Field Numerical Aperture Resolution Instrument Specimen Preparation Contrast ExamplesSơnÎncă nu există evaluări
- Optics Lenses and Image Formation Depth of Field Numerical Aperture Resolution Instrument Specimen Preparation Contrast ExamplesDocument14 paginiOptics Lenses and Image Formation Depth of Field Numerical Aperture Resolution Instrument Specimen Preparation Contrast ExamplesSơnÎncă nu există evaluări
- Hung-Ming Cheng 2001 J. Micromech. Microeng. 11 307Document13 paginiHung-Ming Cheng 2001 J. Micromech. Microeng. 11 307Yiğit Taylan DasÎncă nu există evaluări
- E3613 Focusing and CollimatingDocument3 paginiE3613 Focusing and CollimatingPabloPalaciosAvilaÎncă nu există evaluări
- Real Time Control of Spindle RunoutDocument5 paginiReal Time Control of Spindle RunoutPramod AÎncă nu există evaluări
- Real-Time Video Stabilization For Unmanned Aerial VehiclesDocument4 paginiReal-Time Video Stabilization For Unmanned Aerial VehiclesSaeideh OraeiÎncă nu există evaluări
- Dry Underwater CalibrationDocument9 paginiDry Underwater Calibrationirfan ammarÎncă nu există evaluări
- Lane Et Al. - 2021 - Two-Dimensional Birefringence Measurement Techniqu PDFDocument10 paginiLane Et Al. - 2021 - Two-Dimensional Birefringence Measurement Techniqu PDFDaniel OviedoÎncă nu există evaluări
- Proceedings of Spie: Alignment and Collimation of Submarine Periscope OpticsDocument7 paginiProceedings of Spie: Alignment and Collimation of Submarine Periscope OpticsCeej64Încă nu există evaluări
- 02 01 Software Image CalDocument17 pagini02 01 Software Image CalQuân NguyễnÎncă nu există evaluări
- Aberrations of TelescopeDocument14 paginiAberrations of Telescopelighttec21Încă nu există evaluări
- Birla Institute of Technology and Science, Pilani Pilani Campus Instruction DivisionDocument7 paginiBirla Institute of Technology and Science, Pilani Pilani Campus Instruction DivisionPranav XtremezÎncă nu există evaluări
- 1-s2.0-S0263224119308097-Main - Calibration Method of Light-Field Camera For PhotogrammetryDocument7 pagini1-s2.0-S0263224119308097-Main - Calibration Method of Light-Field Camera For PhotogrammetryViorel RusuÎncă nu există evaluări
- Wang y Oakberg - 1999 - A New Instrument For Measuring Both The Magnitude PDFDocument9 paginiWang y Oakberg - 1999 - A New Instrument For Measuring Both The Magnitude PDFDaniel OviedoÎncă nu există evaluări
- Olympus BHM BH 2 BrochureDocument32 paginiOlympus BHM BH 2 Brochurevyhtran4731Încă nu există evaluări
- Body Guided Camera CalibrationDocument6 paginiBody Guided Camera CalibrationEanesÎncă nu există evaluări
- LPS Section1Document112 paginiLPS Section1prachi.ttcÎncă nu există evaluări
- Foundations of Vision CompressDocument489 paginiFoundations of Vision Compressjakew01010100Încă nu există evaluări
- Shutter Speed Chart and Tips On How To Master It - BorrowLenses BlogDocument15 paginiShutter Speed Chart and Tips On How To Master It - BorrowLenses BlogvizooooooooooÎncă nu există evaluări
- 12th Physics EM 2nd Revision SyllabusDocument3 pagini12th Physics EM 2nd Revision Syllabusekshitavenkatesh.2004Încă nu există evaluări
- Paraxial Eoe 03Document12 paginiParaxial Eoe 03Arkapravo ChaudhuryÎncă nu există evaluări
- 8 Ray OpticsDocument25 pagini8 Ray OpticsHimanshu GuptaÎncă nu există evaluări
- 1986-Pacific-Sierra-Accurate Laboratory Boresight Alignment of Transmitter Receiver Optical AxesDocument8 pagini1986-Pacific-Sierra-Accurate Laboratory Boresight Alignment of Transmitter Receiver Optical AxesLK DAIÎncă nu există evaluări
- Mathematical Limitations of The CIE Mesopic Photometry SystemDocument11 paginiMathematical Limitations of The CIE Mesopic Photometry SystemAyan MandalÎncă nu există evaluări
- Chapter 34B - Reflection and Mirrors II (Analytical)Document28 paginiChapter 34B - Reflection and Mirrors II (Analytical)Heindrich Lloyd Mendoza BasiÎncă nu există evaluări
- AutocollimatorsDocument14 paginiAutocollimatorsMuddaser Nawaz100% (2)
- Article Careers360 20230527174852Document25 paginiArticle Careers360 20230527174852naan singhÎncă nu există evaluări
- Extrinsic Parameters Calibration of A STDocument6 paginiExtrinsic Parameters Calibration of A STximena zeballosÎncă nu există evaluări
- Structure-From-Motion in Spherical Video Using The Von Mises-Fisher DistributionDocument13 paginiStructure-From-Motion in Spherical Video Using The Von Mises-Fisher DistributionlaloÎncă nu există evaluări
- Kerr EffectDocument5 paginiKerr EffectJose GalvanÎncă nu există evaluări
- Fotogrametri Non-Topogr 05Document44 paginiFotogrametri Non-Topogr 05Retno ThriyaniÎncă nu există evaluări
- An Efficient Auto Focus Method For Digital Still CameraDocument12 paginiAn Efficient Auto Focus Method For Digital Still CameraBhaskar RaoÎncă nu există evaluări
- OMS 90 BrochureDocument4 paginiOMS 90 Brochurenhatnam06dt1Încă nu există evaluări
- Camera Design - HlavacDocument59 paginiCamera Design - HlavacasdfÎncă nu există evaluări
- Edge Coupler-ReviewDocument29 paginiEdge Coupler-Reviewjohn xuÎncă nu există evaluări
- Chapter 5 Light Teachers GuideDocument38 paginiChapter 5 Light Teachers GuideSyahrulÎncă nu există evaluări
- Fluoroscopic Television Chains PDFDocument27 paginiFluoroscopic Television Chains PDFJonathan DuranÎncă nu există evaluări
- Micros PDFDocument4 paginiMicros PDFFelipe RobinsonÎncă nu există evaluări
- A Real-Time Image-To-Panorama Registration Approach For BackgroundDocument6 paginiA Real-Time Image-To-Panorama Registration Approach For BackgroundUttapawn AwutpetchÎncă nu există evaluări
- Unit 2: Elements of Photographic SystemDocument12 paginiUnit 2: Elements of Photographic SystemworkuÎncă nu există evaluări
- Anderson 2000 0140Document13 paginiAnderson 2000 0140Particle Beam Physics LabÎncă nu există evaluări
- Introduction to Applied Optics for EngineersDe la EverandIntroduction to Applied Optics for EngineersEvaluare: 5 din 5 stele5/5 (2)
- Electron Beams, Lenses, and OpticsDe la EverandElectron Beams, Lenses, and OpticsA El-KarehÎncă nu există evaluări
- Classical Approach to Constrained and Unconstrained Molecular DynamicsDe la EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsÎncă nu există evaluări
- Elements of Theoretical Mechanics for Electronic Engineers: International Series of Monographs in Electronics and InstrumentationDe la EverandElements of Theoretical Mechanics for Electronic Engineers: International Series of Monographs in Electronics and InstrumentationÎncă nu există evaluări
- Panoramic Imaging: Sensor-Line Cameras and Laser Range-FindersDe la EverandPanoramic Imaging: Sensor-Line Cameras and Laser Range-FindersÎncă nu există evaluări
- GUIDE A Beginners Guide To Film Photography 2020 Analog - Cafe PDFDocument27 paginiGUIDE A Beginners Guide To Film Photography 2020 Analog - Cafe PDFdead421Încă nu există evaluări
- Rheology - New Concepts, Applications and Methods - Durairaj PDFDocument114 paginiRheology - New Concepts, Applications and Methods - Durairaj PDFLord MurphyÎncă nu există evaluări
- 48 INAMI Price List USD (Ex Works) Ophthalmic EquipmentDocument4 pagini48 INAMI Price List USD (Ex Works) Ophthalmic EquipmentMohamed NagyÎncă nu există evaluări
- Digital Image Processing Question PaperDocument4 paginiDigital Image Processing Question PaperGiri KandeÎncă nu există evaluări
- Halo Lighting Product Catalog 1966Document84 paginiHalo Lighting Product Catalog 1966Alan Masters100% (2)
- Optical CommunicationDocument10 paginiOptical CommunicationPrashant Kulshreshtha100% (1)
- Camera SettingsDocument66 paginiCamera SettingsPraveen PrakashÎncă nu există evaluări
- KaleidoscopeDocument5 paginiKaleidoscopeChovek Bez FejzbukaÎncă nu există evaluări
- CNB BE3815NVR Camara Climas ExtremosDocument1 paginăCNB BE3815NVR Camara Climas ExtremosTecnoSmartÎncă nu există evaluări
- 3.2.5 Core Practical Investigating Snell's LawDocument5 pagini3.2.5 Core Practical Investigating Snell's Lawkirisu kirisuÎncă nu există evaluări
- Goniophotometers LSG 1600bDocument20 paginiGoniophotometers LSG 1600blisun008Încă nu există evaluări
- Lighting Lighting: Master Value Ledspot ParDocument3 paginiLighting Lighting: Master Value Ledspot ParAntónio MarquesÎncă nu există evaluări
- Softcam KeyDocument2 paginiSoftcam KeyAhmad RamadhanÎncă nu există evaluări
- AccessLighting Catalog26Document292 paginiAccessLighting Catalog26Enrique Martinez AcuaÎncă nu există evaluări
- Langkah Redraw RumahDocument11 paginiLangkah Redraw RumahDorothea MariaÎncă nu există evaluări
- The Electromagnetic SpectrumDocument65 paginiThe Electromagnetic SpectrumCLester MadShadowÎncă nu există evaluări
- Diffraction and InterferenceDocument40 paginiDiffraction and InterferenceUnexpected TheoryÎncă nu există evaluări
- Nikon D5: 12 FPS, 20MP FX, 4K VideoDocument40 paginiNikon D5: 12 FPS, 20MP FX, 4K VideoIlija ZimonjaÎncă nu există evaluări
- Psychology of Color2Document33 paginiPsychology of Color2abdikani abdilaahiÎncă nu există evaluări
- 10 Essay QuestionsDocument5 pagini10 Essay QuestionsMa. Lourdes SorongonÎncă nu există evaluări
- Physics: Class X - CbseDocument194 paginiPhysics: Class X - CbseCosmos WithmeÎncă nu există evaluări
- Digital Substation AlstomDocument36 paginiDigital Substation Alstomdipteshypatel100% (1)
- Lecture27 Part 4 Thin Film InterferenceDocument10 paginiLecture27 Part 4 Thin Film InterferenceSrinivasulu PuduÎncă nu există evaluări
- DLP For Cot Science 4Document5 paginiDLP For Cot Science 4Nerissa Villafuerte100% (1)
- Waves (Complete) Oct SessionDocument28 paginiWaves (Complete) Oct Sessionaliayanraza5Încă nu există evaluări
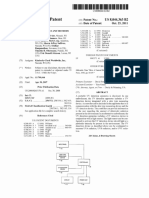
- United States Patent (10) Patent No.: US 8,044,363 B2Document11 paginiUnited States Patent (10) Patent No.: US 8,044,363 B2Cristina DragomirÎncă nu există evaluări
- Zeeman EffectDocument3 paginiZeeman EffectSANDEEP TÎncă nu există evaluări
- Cara Menggunakan RefractometerDocument4 paginiCara Menggunakan RefractometerNirwan ToroÎncă nu există evaluări
- Professional 2014Document172 paginiProfessional 2014comsphereÎncă nu există evaluări
- Bionic Eye: A Paper Presentation OnDocument19 paginiBionic Eye: A Paper Presentation OnYellaReddy TarigopulaÎncă nu există evaluări